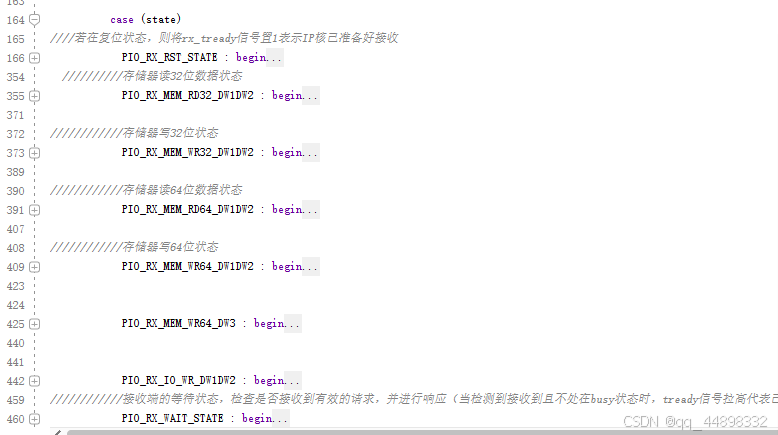
PIO_RX_MEM_WR32_FMT_TYPE : begin
tlp_type <= #TCQ m_axis_rx_tdata[31:24];
req_len <= #TCQ m_axis_rx_tdata[9:0];
m_axis_rx_tready <= #TCQ 1'b0; //未准备好接收下一个
if (m_axis_rx_tdata[9:0] == 10'b1)///长度为1,写一个字节
begin
wr_be <= #TCQ m_axis_rx_tdata[39:32]; //写字节使能赋值,并将状态转为存储器32位写状态
state <= #TCQ PIO_RX_MEM_WR32_DW1DW2;
end // if (m_axis_rx_tdata[9:0] == 10'b1)
else
begin
state <= #TCQ PIO_RX_RST_STATE;
end // if !(m_axis_rx_tdata[9:0] == 10'b1)
end // PIO_RX_MEM_WR32_FMT_TYPE
class="hljs-button signin active" data-title="登录复制" data-report-click="{"spm":"1001.2101.3001.4334"}"> class="hide-preCode-box">
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
//数据类型为4DW存储器读请求,不带数据
PIO_RX_MEM_RD64_FMT_TYPE : begin
tlp_type <= #TCQ m_axis_rx_tdata[31:24];
req_len <= #TCQ m_axis_rx_tdata[9:0];
m_axis_rx_tready <= #TCQ 1'b0;
if (m_axis_rx_tdata[9:0] == 10'b1)//代表读取的是一个字节
begin
req_tc <= #TCQ m_axis_rx_tdata[22:20];
req_td <= #TCQ m_axis_rx_tdata[15];
req_ep <= #TCQ m_axis_rx_tdata[14];
req_attr <= #TCQ m_axis_rx_tdata[13:12];
req_len <= #TCQ m_axis_rx_tdata[9:0];
req_rid <= #TCQ m_axis_rx_tdata[63:48];
req_tag <= #TCQ m_axis_rx_tdata[47:40];
req_be <= #TCQ m_axis_rx_tdata[39:32];
state <= #TCQ PIO_RX_MEM_RD64_DW1DW2; ///状态变为存储器64位读
end // if (m_axis_rx_tdata[9:0] == 10'b1)
else
begin
state <= #TCQ PIO_RX_RST_STATE;
end // if !(m_axis_rx_tdata[9:0] == 10'b1)
end // PIO_RX_MEM_RD64_FMT_TYPE
class="hljs-button signin active" data-title="登录复制" data-report-click="{"spm":"1001.2101.3001.4334"}"> class="hide-preCode-box">
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
//检测到帧类型为存储器写4DW
PIO_RX_MEM_WR64_FMT_TYPE : begin
tlp_type <= #TCQ m_axis_rx_tdata[31:24];
req_len <= #TCQ m_axis_rx_tdata[9:0];
if (m_axis_rx_tdata[9:0] == 10'b1) begin
wr_be <= #TCQ m_axis_rx_tdata[39:32]; ///字节使能并将状态转为存储器64位写状态
state <= #TCQ PIO_RX_MEM_WR64_DW1DW2;
end // if (m_axis_rx_tdata[9:0] == 10'b1)
else
begin
state <= #TCQ PIO_RX_RST_STATE;
end // if !(m_axis_rx_tdata[9:0] == 10'b1)
end // PIO_RX_MEM_WR64_FMT_TYPE
class="hljs-button signin active" data-title="登录复制" data-report-click="{"spm":"1001.2101.3001.4334"}"> class="hide-preCode-box">
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
//若检测到帧类型为IO读请求3DW
PIO_RX_IO_RD32_FMT_TYPE : begin
tlp_type <= #TCQ m_axis_rx_tdata[31:24];
req_len <= #TCQ m_axis_rx_tdata[9:0];
m_axis_rx_tready <= #TCQ 1'b0;
if (m_axis_rx_tdata[9:0] == 10'b1)
begin
req_tc <= #TCQ m_axis_rx_tdata[22:20];
req_td <= #TCQ m_axis_rx_tdata[15];
req_ep <= #TCQ m_axis_rx_tdata[14];
req_attr <= #TCQ m_axis_rx_tdata[13:12];
req_len <= #TCQ m_axis_rx_tdata[9:0];
req_rid <= #TCQ m_axis_rx_tdata[63:48];
req_tag <= #TCQ m_axis_rx_tdata[47:40];
req_be <= #TCQ m_axis_rx_tdata[39:32];
state <= #TCQ PIO_RX_MEM_RD32_DW1DW2; ///状态变为存储器读32位数据
end // if (m_axis_rx_tdata[9:0] == 10'b1)
else
begin
state <= #TCQ PIO_RX_RST_STATE;
end // if !(m_axis_rx_tdata[9:0] == 10'b1)
end // PIO_RX_IO_RD32_FMT_TYPE
class="hljs-button signin active" data-title="登录复制" data-report-click="{"spm":"1001.2101.3001.4334"}"> class="hide-preCode-box">
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
//检测到帧类型为IO写数据3DW
PIO_RX_IO_WR32_FMT_TYPE : begin
tlp_type <= #TCQ m_axis_rx_tdata[31:24];
req_len <= #TCQ m_axis_rx_tdata[9:0];
m_axis_rx_tready <= #TCQ 1'b0;
if (m_axis_rx_tdata[9:0] == 10'b1)
begin
req_tc <= #TCQ m_axis_rx_tdata[22:20];
req_td <= #TCQ m_axis_rx_tdata[15];
req_ep <= #TCQ m_axis_rx_tdata[14];
req_attr <= #TCQ m_axis_rx_tdata[13:12];
req_len <= #TCQ m_axis_rx_tdata[9:0];
req_rid <= #TCQ m_axis_rx_tdata[63:48];
req_tag <= #TCQ m_axis_rx_tdata[47:40];
req_be <= #TCQ m_axis_rx_tdata[39:32];
wr_be <= #TCQ m_axis_rx_tdata[39:32];
state <= #TCQ PIO_RX_IO_WR_DW1DW2; ///转变为IO写状态
end //if (m_axis_rx_tdata[9:0] == 10'b1)
else
begin
state <= #TCQ PIO_RX_RST_STATE;
end //if !(m_axis_rx_tdata[9:0] == 10'b1)
end // PIO_RX_IO_WR32_FMT_TYPE
default : begin // other TLPs
state <= #TCQ PIO_RX_RST_STATE;
end // default
endcase
end // if (sop)
else
state <= #TCQ PIO_RX_RST_STATE;
end // PIO_RX_RST_STATE
class="hljs-button signin active" data-title="登录复制" data-report-click="{"spm":"1001.2101.3001.4334"}"> class="hide-preCode-box">
PIO_RX_MEM_WR32_DW1DW2 : begin
if (m_axis_rx_tvalid)
begin
wr_data <= #TCQ m_axis_rx_tdata[63:32]; //需要写入数据为m_axis_rx_tdata[63:32]上的数据
wr_en <= #TCQ 1'b1;
m_axis_rx_tready <= #TCQ 1'b0;
wr_addr <= #TCQ {region_select[1:0],m_axis_rx_tdata[10:2]}; //写的地址为从接收到的32位数据中提取出9位地址(通过位选择[10:2]),并且通过region_select[1:0]来附加额外的区域选择信息(这通常是为了区分不同的内存区域)
state <= #TCQ PIO_RX_WAIT_STATE;
end // if (m_axis_rx_tvalid)
else
state <= #TCQ PIO_RX_MEM_WR32_DW1DW2; //若未准备好有效数据则将状态转回重新进行操作
end // PIO_RX_MEM_WR32_DW1DW2
class="hljs-button signin active" data-title="登录复制" data-report-click="{"spm":"1001.2101.3001.4334"}"> class="hide-preCode-box">
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
存储器读64位数据状态
PIO_RX_MEM_RD64_DW1DW2 : begin
if (m_axis_rx_tvalid)
begin
req_addr <= #TCQ {region_select[1:0],m_axis_rx_tdata[42:34], 2'b00}; //从接收到的64位数据中提取出9位地址(通过位选择[42:34]),并且通过region_select[1:0]来附加额外的区域选择信息(这通常是为了区分不同的内存区域)。2'b00可能是为了对齐地址,确保地址是字对齐的。
req_compl <= #TCQ 1'b1;
req_compl_wd <= #TCQ 1'b1;
m_axis_rx_tready <= #TCQ 1'b0;
state <= #TCQ PIO_RX_WAIT_STATE;
end // if (m_axis_rx_tvalid)
else
state <= #TCQ PIO_RX_MEM_RD64_DW1DW2;
end // PIO_RX_MEM_RD64_DW1DW2
class="hljs-button signin active" data-title="登录复制" data-report-click="{"spm":"1001.2101.3001.4334"}"> class="hide-preCode-box">
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
存储器写64位状态
PIO_RX_MEM_WR64_DW1DW2 : begin
if (m_axis_rx_tvalid)
begin
m_axis_rx_tready <= #TCQ 1'b0;
wr_addr <= #TCQ {region_select[1:0],m_axis_rx_tdata[42:34]};
state <= #TCQ PIO_RX_MEM_WR64_DW3; //状态转为准备接收数据的下一个 32 位部分(DW3),否则停留状态等待数据有效
end // if (m_axis_rx_tvalid)
else
state <= #TCQ PIO_RX_MEM_WR64_DW1DW2;
end // PIO_RX_MEM_WR64_DW1DW2
PIO_RX_MEM_WR64_DW3 : begin
if (m_axis_rx_tvalid)
begin
wr_data <= #TCQ m_axis_rx_tdata[31:0]; ///接下来的32位数据均为写入数据
wr_en <= #TCQ 1'b1;
m_axis_rx_tready <= #TCQ 1'b0;
state <= #TCQ PIO_RX_WAIT_STATE;
end // if (m_axis_rx_tvalid)
else
state <= #TCQ PIO_RX_MEM_WR64_DW3;
end // PIO_RX_MEM_WR64_DW3
class="hljs-button signin active" data-title="登录复制" data-report-click="{"spm":"1001.2101.3001.4334"}"> class="hide-preCode-box">
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
//
PIO_RX_IO_WR_DW1DW2 : begin
if (m_axis_rx_tvalid)
begin
wr_data <= #TCQ m_axis_rx_tdata[63:32];
wr_en <= #TCQ 1'b1;
m_axis_rx_tready <= #TCQ 1'b0;
wr_addr <= #TCQ {region_select[1:0],m_axis_rx_tdata[10:2]};
req_compl <= #TCQ 1'b1;
req_compl_wd <= #TCQ 1'b0;
state <= #TCQ PIO_RX_WAIT_STATE;
end // if (m_axis_rx_tvalid)
else
state <= #TCQ PIO_RX_IO_WR_DW1DW2;
end // PIO_RX_IO_WR_DW1DW2
class="hljs-button signin active" data-title="登录复制" data-report-click="{"spm":"1001.2101.3001.4334"}"> class="hide-preCode-box">
PIO_RX_WAIT_STATE : begin
wr_en <= #TCQ 1'b0;
req_compl <= #TCQ 1'b0;
if ((tlp_type == PIO_RX_MEM_WR32_FMT_TYPE) && (!wr_busy))
begin
m_axis_rx_tready <= #TCQ 1'b1;
state <= #TCQ PIO_RX_RST_STATE;
end // if ((tlp_type == PIO_RX_MEM_WR32_FMT_TYPE) && (!wr_busy))
else if ((tlp_type == PIO_RX_IO_WR32_FMT_TYPE) && (!wr_busy))
begin
m_axis_rx_tready <= #TCQ 1'b1;
state <= #TCQ PIO_RX_RST_STATE;
end // if ((tlp_type == PIO_RX_IO_WR32_FMT_TYPE) && (!wr_busy))
else if ((tlp_type == PIO_RX_MEM_WR64_FMT_TYPE) && (!wr_busy))
begin
m_axis_rx_tready <= #TCQ 1'b1;
state <= #TCQ PIO_RX_RST_STATE;
end // if ((tlp_type == PIO_RX_MEM_WR64_FMT_TYPE) && (!wr_busy))
else if ((tlp_type == PIO_RX_MEM_RD32_FMT_TYPE) && (compl_done))
begin
m_axis_rx_tready <= #TCQ 1'b1;
state <= #TCQ PIO_RX_RST_STATE;
end // if ((tlp_type == PIO_RX_MEM_RD32_FMT_TYPE) && (compl_done))
else if ((tlp_type == PIO_RX_IO_RD32_FMT_TYPE) && (compl_done))
begin
m_axis_rx_tready <= #TCQ 1'b1;
state <= #TCQ PIO_RX_RST_STATE;
end // if ((tlp_type == PIO_RX_IO_RD32_FMT_TYPE) && (compl_done))
else if ((tlp_type == PIO_RX_MEM_RD64_FMT_TYPE) && (compl_done))
begin
m_axis_rx_tready <= #TCQ 1'b1;
state <= #TCQ PIO_RX_RST_STATE;
end // if ((tlp_type == PIO_RX_MEM_RD64_FMT_TYPE) && (compl_done))
else
state <= #TCQ PIO_RX_WAIT_STATE;
end // PIO_RX_WAIT_STATE
default : begin
// default case stmt
state <= #TCQ PIO_RX_RST_STATE;
end // default
endcase
class="hljs-button signin active" data-title="登录复制" data-report-click="{"spm":"1001.2101.3001.4334"}"> class="hide-preCode-box">
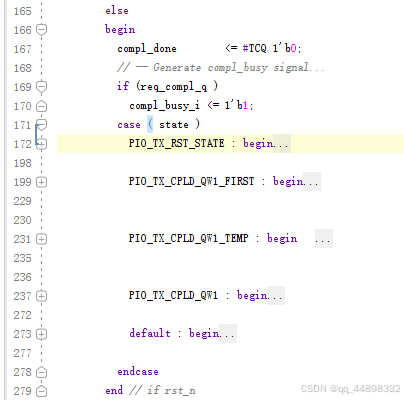
PIO_TX_CPLD_QW1 : begin
if (s_axis_tx_tready)
begin
s_axis_tx_tlast <= #TCQ 1'b1;
s_axis_tx_tvalid <= #TCQ 1'b1;
// Swap DWORDS for AXI
s_axis_tx_tdata <= #TCQ { // Bits
rd_data, // 32,数据
req_rid, // 16,requester id
req_tag, // 8,
{1'b0}, // 1
lower_addr // 7
};
// Here we select if the packet has data or
// not. The strobe signal will mask data
// when it is not needed. No reason to change
// the data bus.
if (req_compl_wd_q)
s_axis_tx_tkeep <= #TCQ 8'hFF;
else
s_axis_tx_tkeep <= #TCQ 8'h0F;
compl_done <= #TCQ 1'b1;
compl_busy_i <= #TCQ 1'b0;
state <= #TCQ PIO_TX_RST_STATE;
end // if (s_axis_tx_tready)
else
state <= #TCQ PIO_TX_CPLD_QW1;
end // PIO_TX_CPLD_QW1
default : begin
// case default stmt
state <= #TCQ PIO_TX_RST_STATE;
end
endcase
class="hljs-button signin active" data-title="登录复制" data-report-click="{"spm":"1001.2101.3001.4334"}"> class="hide-preCode-box">
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
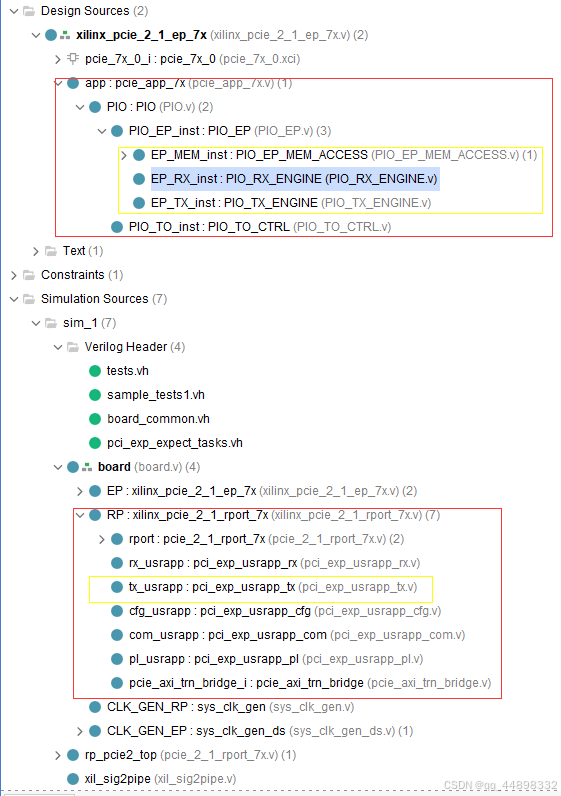
MEM_ACCESS
同样我们先看输入输出信号
module PIO_EP_MEM_ACCESS #(
parameter TCQ = 1
) (
clk,
rst_n,
// Read Access
rd_addr, // I [10:0] Read Address
rd_be, // I [3:0] Read Byte Enable
rd_data, // O [31:0] Read Data
// Write Access
wr_addr, // I [10:0] Write Address
wr_be, // I [7:0] Write Byte Enable
wr_data, // I [31:0] Write Data
wr_en, // I Write Enable
wr_busy // O Write Controller Busy
);
input clk;
input rst_n;
// Read Port
input [10:0] rd_addr;
input [3:0] rd_be;
output [31:0] rd_data;
// Write Port
input [10:0] wr_addr;
input [7:0] wr_be; //写字节使能
input [31:0] wr_data;
input wr_en;
output wr_busy;
class="hljs-button signin active" data-title="登录复制" data-report-click="{"spm":"1001.2101.3001.4334"}"> class="hide-preCode-box">
case ( wr_mem_state )
PIO_MEM_ACCESS_WR_RST : begin
if (wr_en)
begin // read state
wr_mem_state <= #TCQ PIO_MEM_ACCESS_WR_WAIT; //Pipelining happens in RAM's internal output reg.
end
else
begin
write_en <= #TCQ 1'b0;
wr_mem_state <= #TCQ PIO_MEM_ACCESS_WR_RST;
end
end // PIO_MEM_ACCESS_WR_RST
class="hljs-button signin active" data-title="登录复制" data-report-click="{"spm":"1001.2101.3001.4334"}">
PIO_MEM_ACCESS_WR_READ : begin
// Now save the selected BRAM B port data out现在保存选定的BRAM B端口数据,BRAM端口B,可以对BYTE进行操作
pre_wr_data <= #TCQ w_pre_wr_data;
write_en <= #TCQ 1'b0;
wr_mem_state <= #TCQ PIO_MEM_ACCESS_WR_WRITE;
end // PIO_MEM_ACCESS_WR_READ
class="hljs-button signin active" data-title="登录复制" data-report-click="{"spm":"1001.2101.3001.4334"}">




评论记录:
回复评论: