
SimpleFOC教程目录:请点击
一、霍尔电机介绍
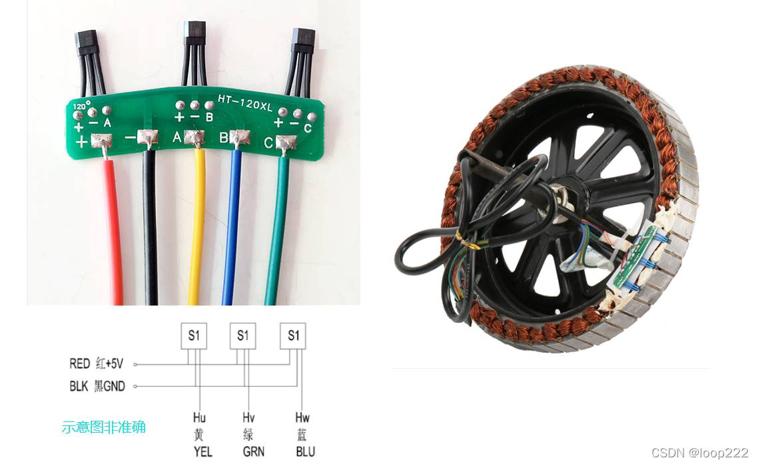
- 霍尔电机就是带霍尔传感器的直流无刷电机,下图
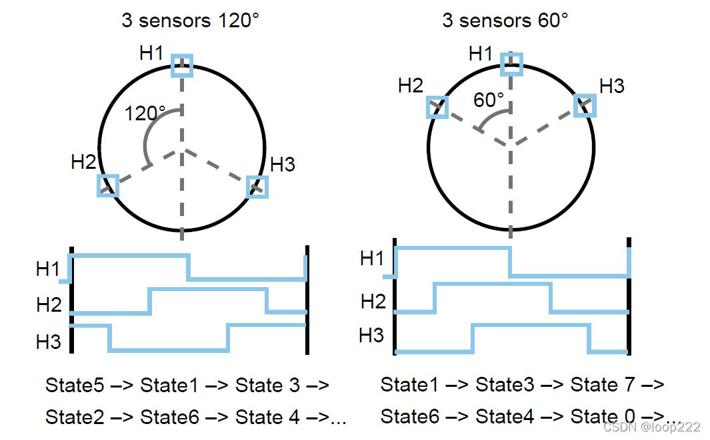
- 霍尔有两种安装方式,120度和60度,120度安装方式的稍微常见一些,下图
- 主要应用于车轮,特别是电动自行车,几乎都是霍尔电机,下图
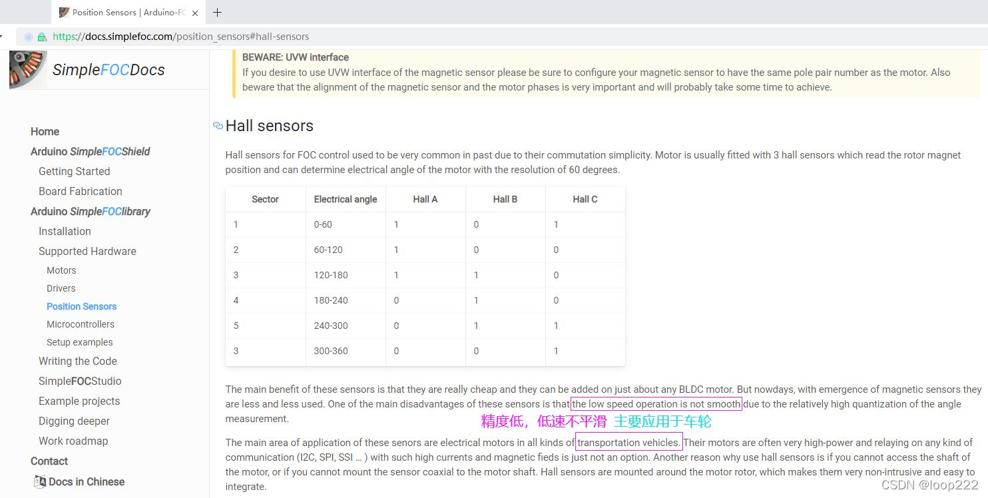
- 如果是做机器人底盘,霍尔电机是个很好的选择;
- 如果是做机械臂或者高精度应用的,霍尔电机精度低不适合此类场景。
二、ESP32drive控制霍尔电机
2.1、原理图
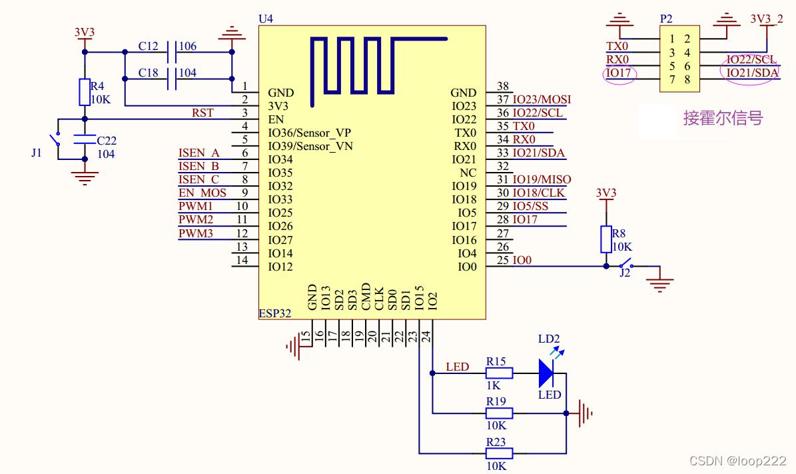
2.2、读霍尔角度
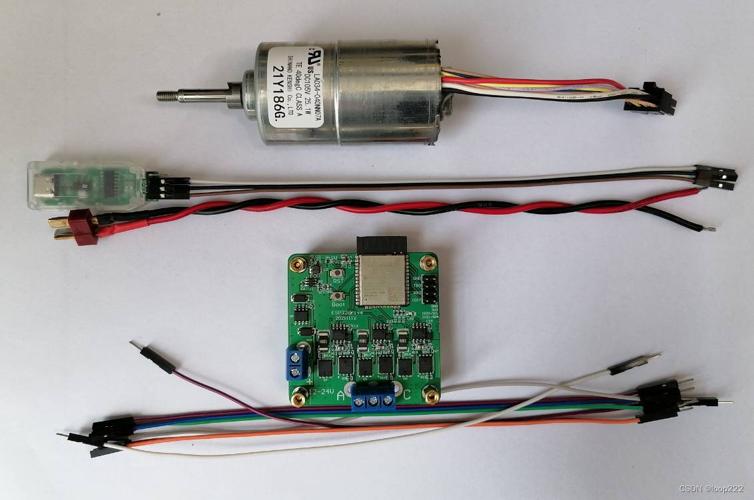
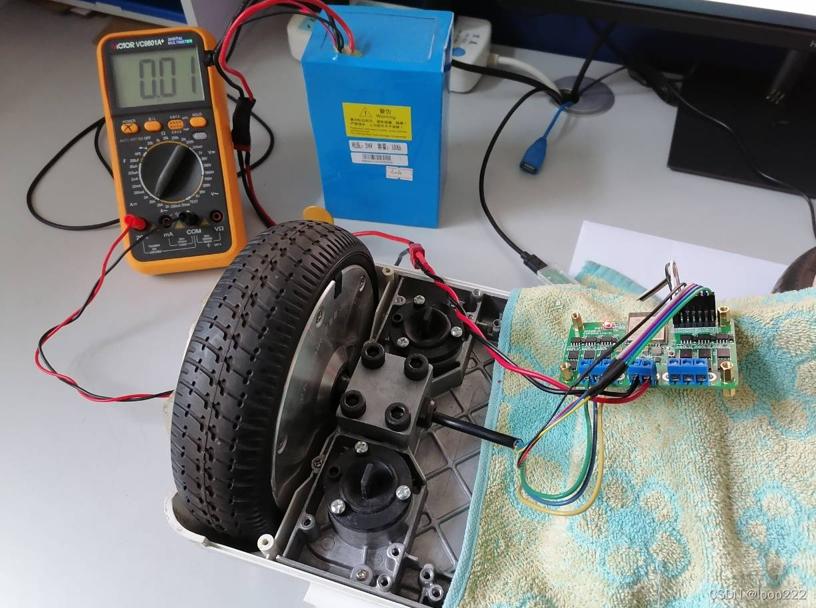
2.2.1、硬件准备
| 序号 | 名称 | 数量 |
|---|---|---|
| 1 | USB转串口 | 1 |
| 2 | ESP32drive | 1 |
| 3 | 霍尔电机 | 1 |
| 4 | 12V电源 | 1 |
| 5 | 杜邦线 | 若干 |
ESP32-D 购买链接:某宝购买
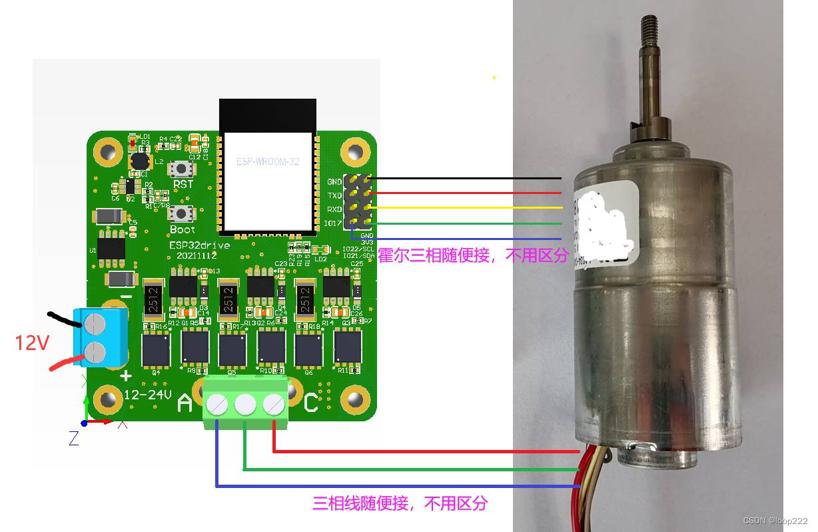
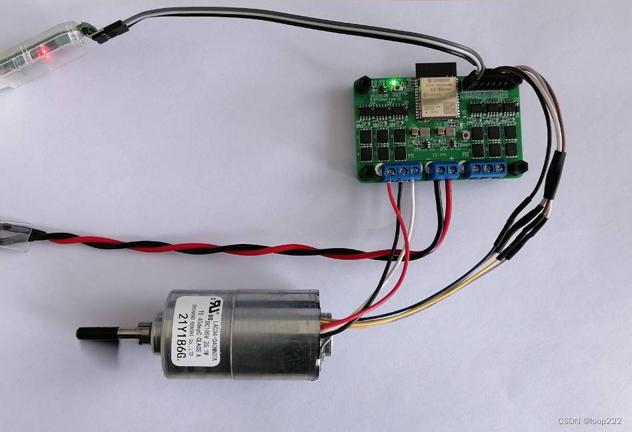
2.2.2、硬件连接

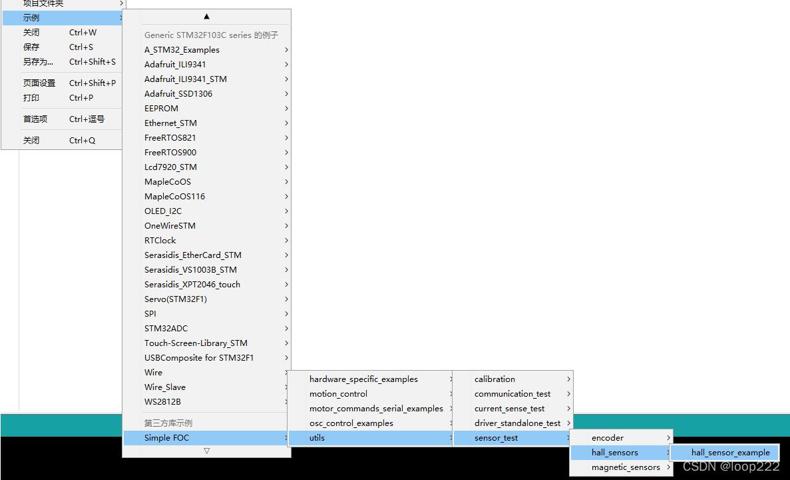
2.2.3、代码演示
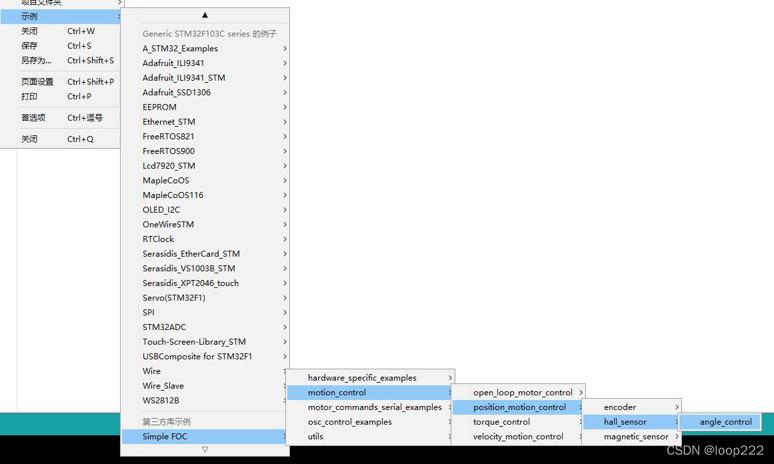
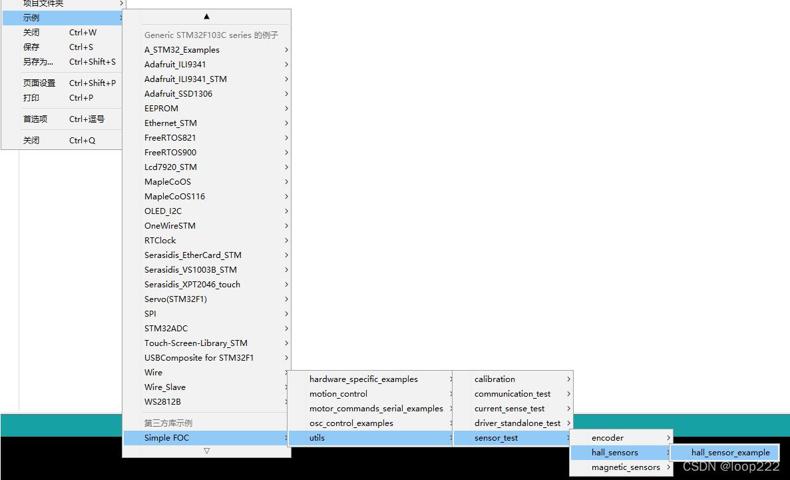
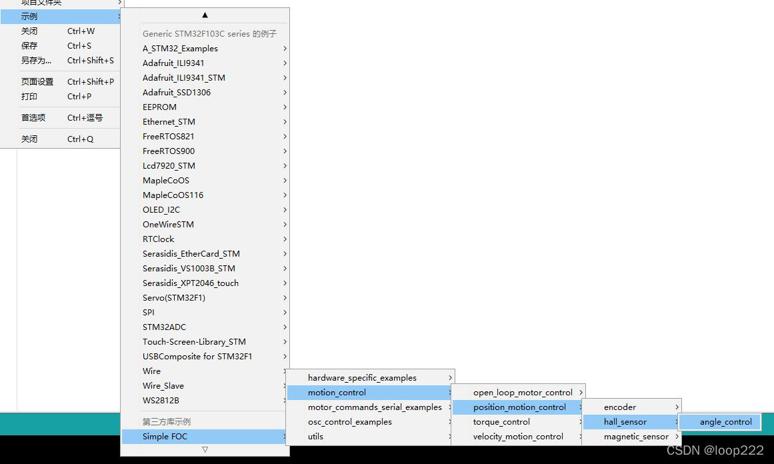
- 打开示例
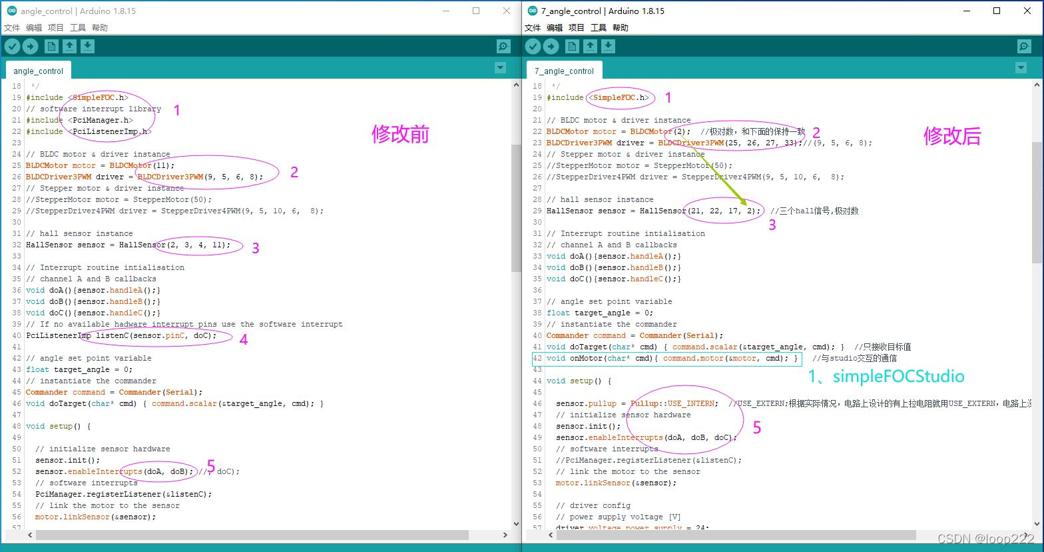
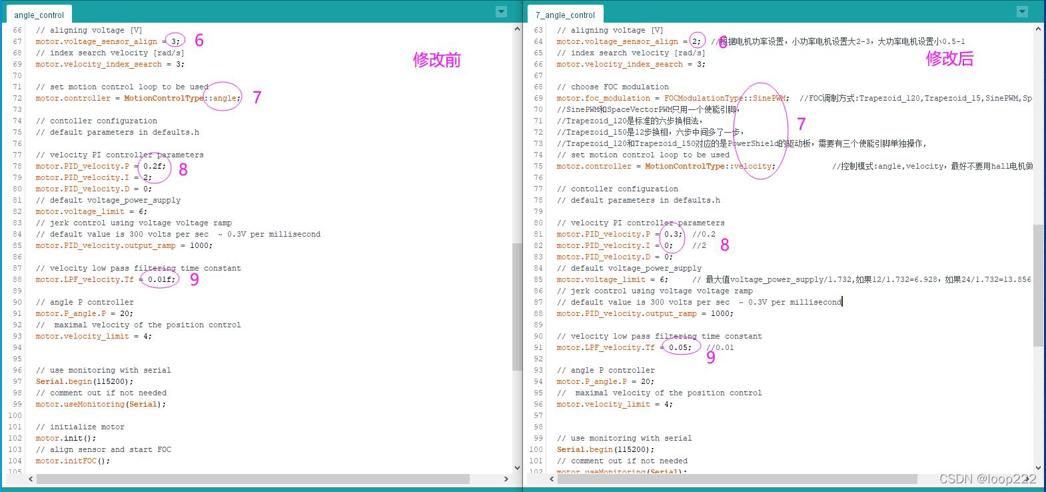
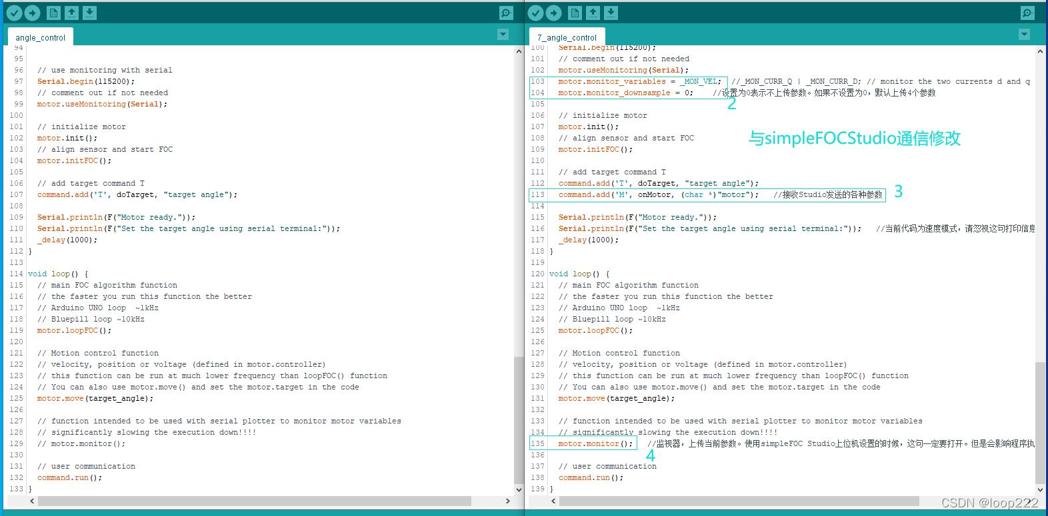
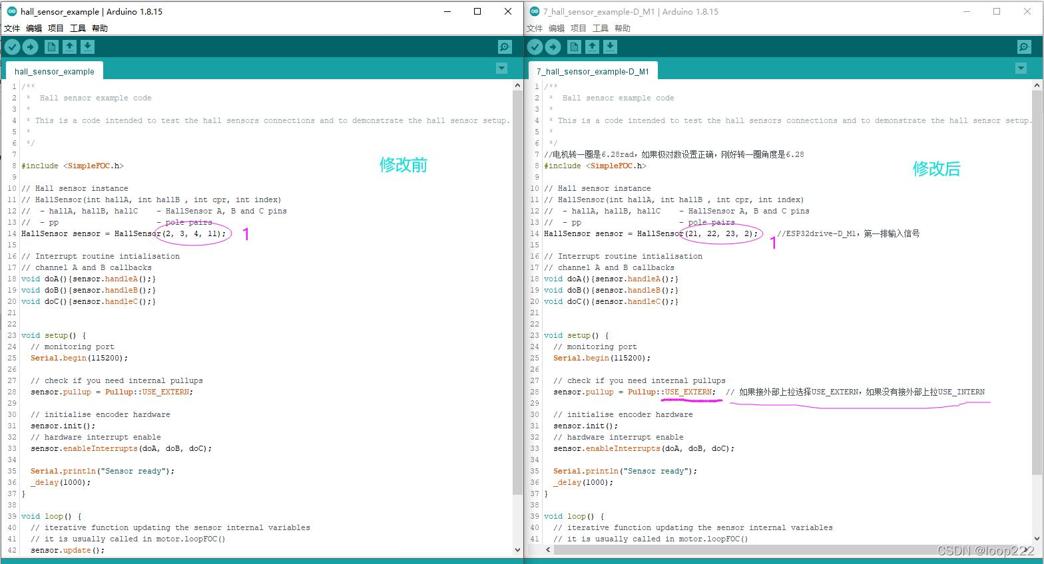
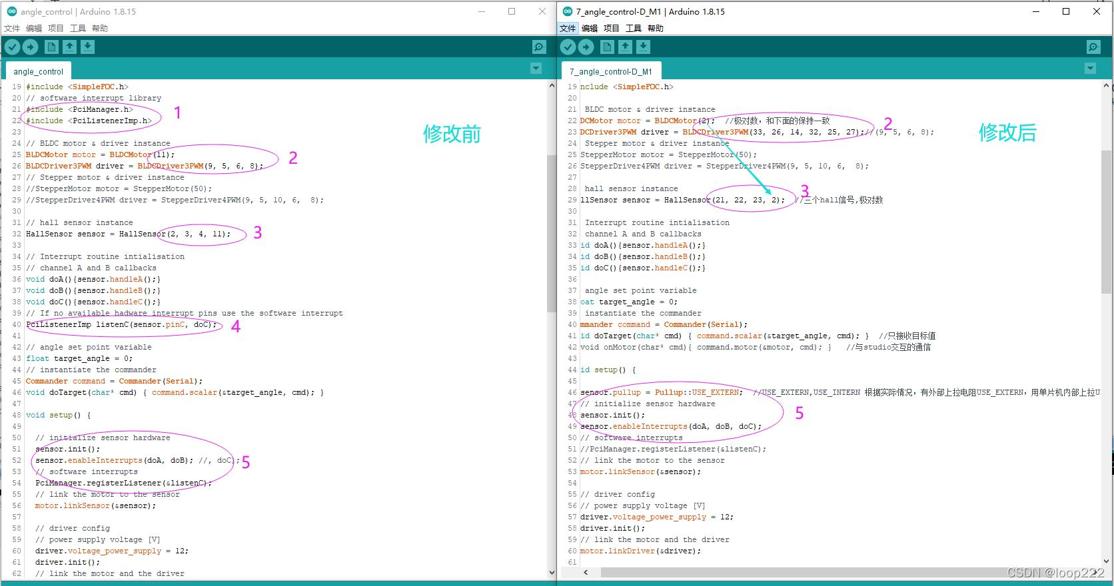
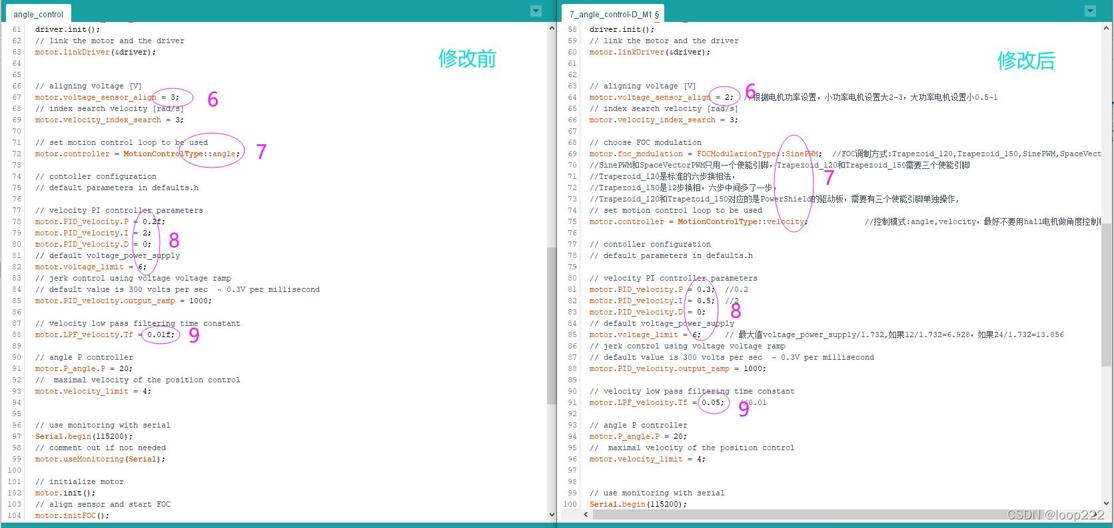
- 修改代码
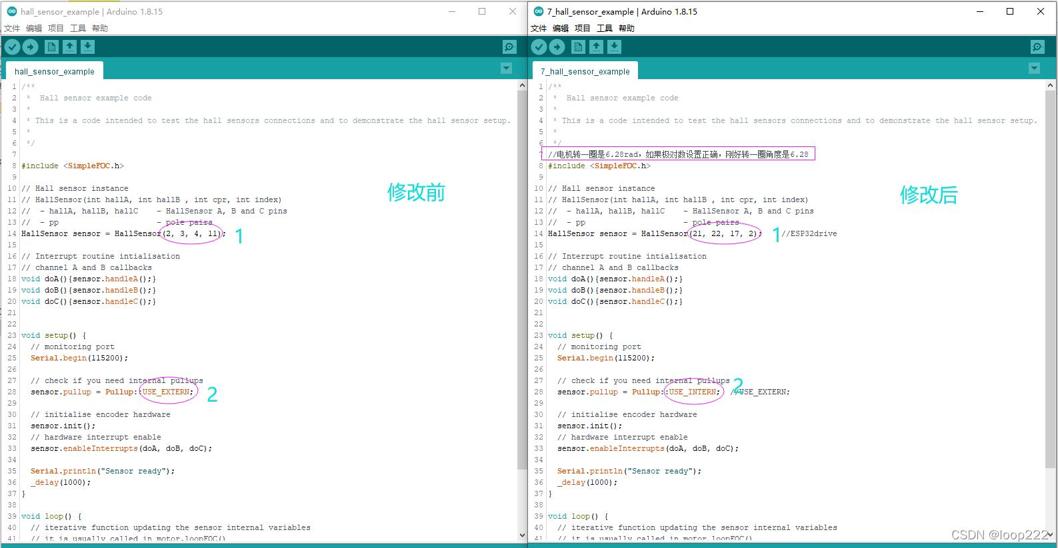
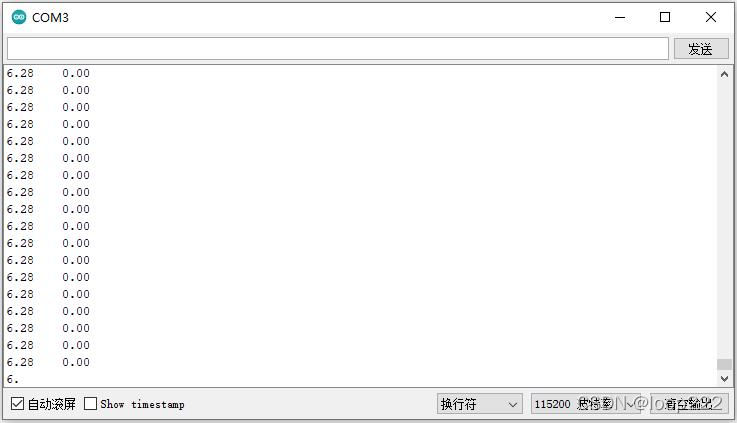
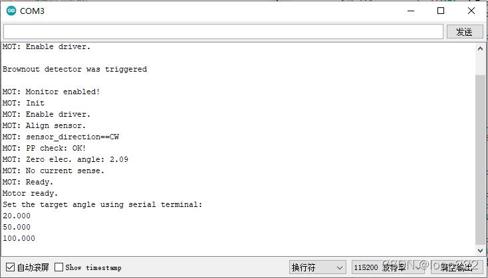
- 用手转动电机轴,观察角度输出。如果极对数设置正确,刚好转一圈角度为6.28,
2.3、控制霍尔电机
2.3.1、硬件准备
与上面2.2.1 的准备相同。
2.3.2、硬件连接
ESP32-D 购买链接:某宝购买
2.3.3、代码演示
-
打开示例
-
修改代码
-
发送指令,控制电机转动
2.3.4、与simpleFOCStudio的互动
- 如果对simpleFOCStudio不熟悉,可以先阅读此文:SimpleFOCStudio安装使用说明及PID调试
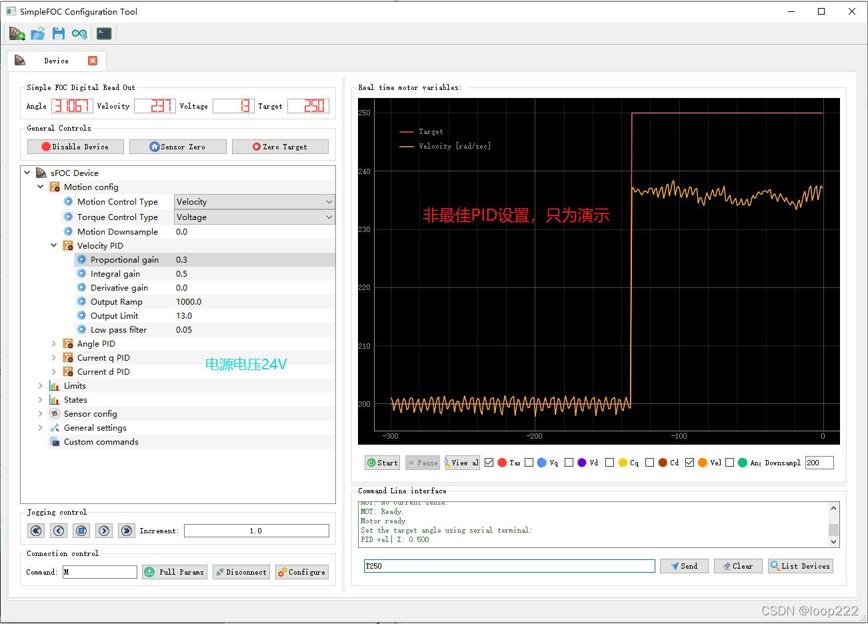
- 上面修改代码已经给出了与simpleFOCStudio通信需要添加的代码,
- 下面的演示采用24V电压,增大电压可以达到更高的转速,
三、ESP32drive-D控制霍尔电机
3.1、原理图
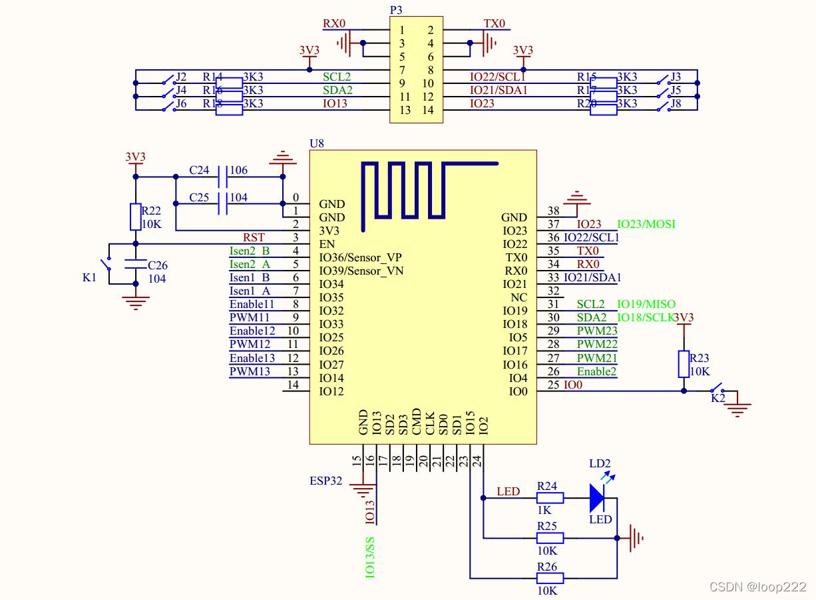
- ESP32drive-D采用非对称电路设计,M1三个使能引脚,M2一个使能引脚,
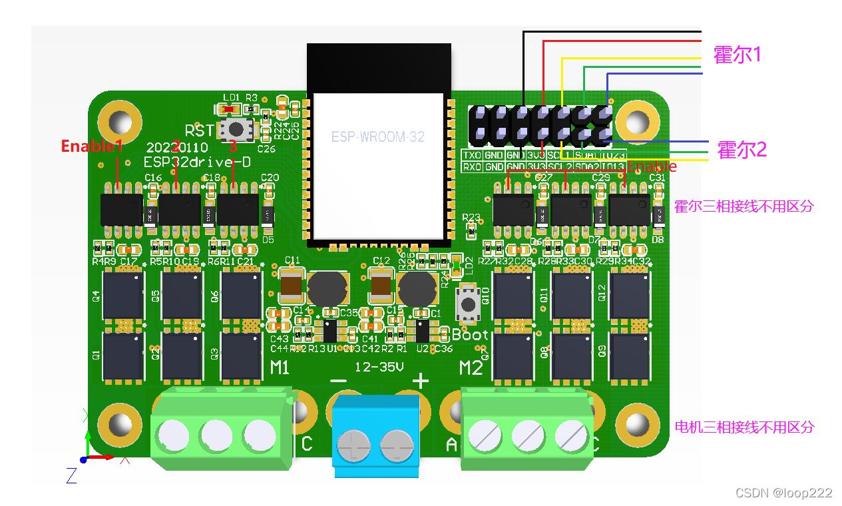
- 霍尔信号设计的有上拉电阻,可以短路跳线(背面),
3.2、读霍尔角度
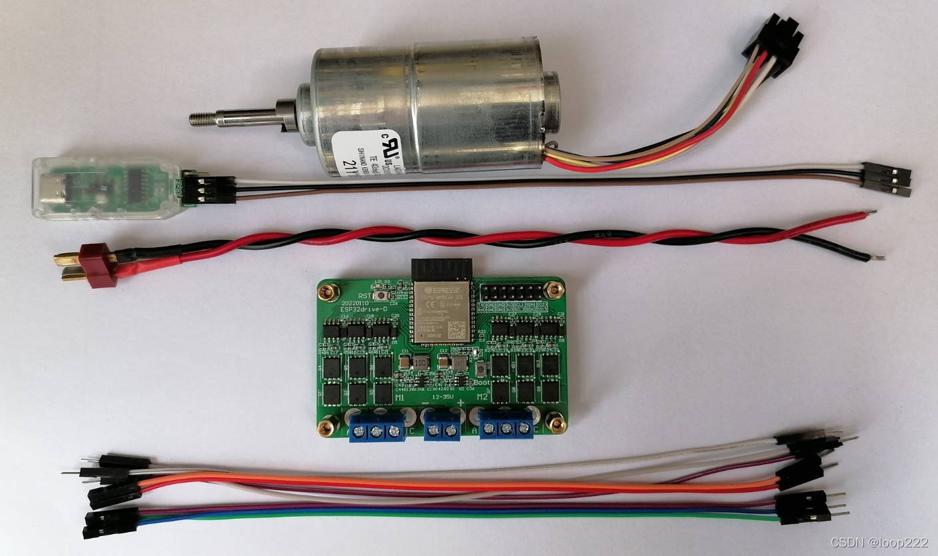
3.2.1、硬件准备
| 序号 | 名称 | 数量 |
|---|---|---|
| 1 | USB转串口 | 1 |
| 2 | ESP32drive-D | 1 |
| 3 | 霍尔电机 | 1 |
| 4 | 12V电源 | 1 |
| 5 | 杜邦线 | 若干 |
ESP32-D 购买链接:某宝购买
3.2.2、代码演示
3.3、控制霍尔电机

3.3.1、打开示例
3.3.2、修改代码
3.3.3、问题说明
- ESP32drive-D的M1采用了三个使能引脚控制,就是为了实现方波控制,但是实际测试发现,Trapezoid_120和Trapezoid_150两种调制模式,检测的极对数总是不对。强行发送指令电机也可以转动,最高转速与SinePWM和SpaceVectorPWM调制模式差不多。
- 比如测试用的霍尔电机为2对极,如果用SinePWM和SpaceVectorPWM调制模式,检测是正常的,控制也是正常的;如果用Trapezoid_120和Trapezoid_150检测到的极对数是2.4。本人已经反复测试对比,更换了STM32F103C8T6和PowerShieldV0.2,检测到的极对数都是2.4,也可能是我用的不对,或者这部分代码有问题。
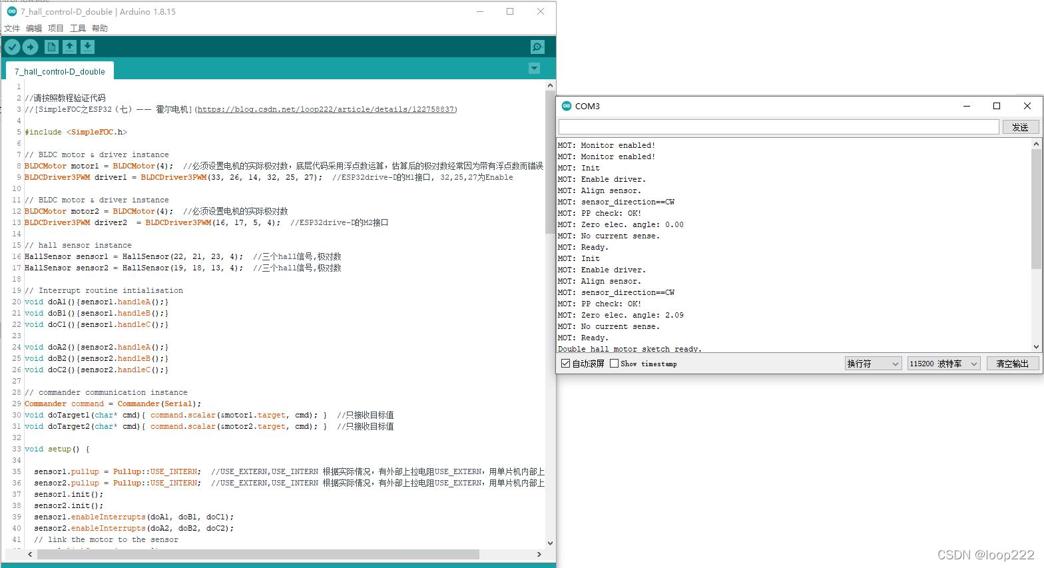
3.4、控制双霍尔电机
- 控制双霍尔电机在《SimpleFOC之ESP32(六)—— 双电机控制》的基础上修改,
- 控制效果不太好,双电机检测都正常,但是转动时有时会突然停止,或者两个电机都正常转动的时候,操作一个电机反转,另一个电机会停止。估计跟霍尔检测的中断配置有关,代码中霍尔信号全部是中断模式,这个问题暂时不深入研究,请大家避坑!
问题总结分析
- 问题:
- 1、Trapezoid_120和Trapezoid_150两种调制模式检测极对数不准确,不好用。暂时没有分析出原因。
- 2、单个霍尔电机控制,12V时偶尔会出现突然不转的现象,用示波器查看三相PWM波形已经变为全部是高电平;24V时出现突然不转的频率明显高于12V。
- 3、双霍尔电机控制非常不稳定。(双霍尔电机使用6个中断)
- 原因分析:
- 1、霍尔信号直接进入单片机,中间没有加滤波电路,工业用驱动器的霍尔信号都有阻容滤波设计。
- 2、霍尔信号使用中断模式,软件上也没有滤波处理。
- 3、查看SimpleFOC的底层代码,霍尔电机的处理方式是这样的:霍尔信号中断时更新一次角度,Trapezoid_120和Trapezoid_150根据角度产生方波;SPWM或者SVPWM根据角度产生矢量,如果电机是2对极,一圈12个霍尔信号,也就只有12个矢量。所以无论是方波控制,还是弦波控制,电角度每次都是跨60度,表现为电机振动大噪音大,也因此更容易产品干扰,所以同样是中断模式的ABZ编码器电机程序出问题的概率要小很多。
- 第3个问题与常见的FOC控制霍尔电机处理方式不一样,后续应该会升级。

(完)
请继续阅读相关文章:
SimpleFOC之ESP32(一)—— 搭建开发环境
SimpleFOC之ESP32(二)—— 开环控制
SimpleFOC之ESP32(三)—— 闭环控制
SimpleFOC之ESP32(四)—— 电流闭环控制Inline
SimpleFOC之ESP32(五)—— 电流闭环控制Lowside
SimpleFOC之ESP32(六)—— 双电机控制
SimpleFOC之ESP32(七)—— 霍尔电机
SimpleFOC之ESP32(八)—— ABZ编码器电机
SimpleFOC之ESP32(九)—— WIFI、UDP和TCP
SimpleFOC之ESP32(十)—— ESP-NOW和力矩反馈
评论记录:
回复评论: