
SimpleFOC教程目录:请点击
说明
1、PID调试时需要反复的更改参数,如果每次都要下载代码非常繁琐,使用SimpleFOCStudio,参数通过串口下载非常方便高效,电机运动效果通过图形化的方式展现出来,非常直观,很容易找到PID参数的设置规律,所以建议大家通过这个软件调试PID。
2、SimpleFOCStudio是一个“纯软件”的上位机软件,能读到这篇文章的大部分都是玩电机的偏硬件的同学,这对大家来说有一定难度,软件硬件的技术其实是非常类似的,它们的差别主要是思维方式的差别,所以先明白我们要安装的是什么这点很重要。
3、SimpleFOCStudio的运行需要电机驱动器的配合,提供通信协议对接,还要有一定的电机控制技术为前提,所以一个专业的软件工程师虽然能安装这个软件,但并不能很好的操控这个软件。
4、SimpleFOC做为开源项目,是一个专业的团队在运营。如果你自己实在装不好这个软件(这很正常),找同学或者朋友帮忙,学习工作中要有团队精神,学会合作!
一、SimpleFOCStudio安装
1.1、安装的是什么
按照官方说法大概分以下几步:
- 1、安装python,(官方让安装 anaconda,这是个坑,不要踩)
- 2、下载simplefocstudio源码,
- 3、pip install -r “requirements.txt” ,
- 4、python simpleFOCStudio.py 。
为什么要这么安装,我来一 一解释:
- 1、SimpleFOCStudio是用python代码写的,所以需要先安装它的运行环境,这就好比是你要写STM32的代码要先安装keil一样。
- 2、下载软件源码,这个不解释。
- 3、在下载的源码中找到 requirements.txt 这个文件,打开可以看到

requirements.txt 文件中只有这四行,代表了四个插件,所以 pip install -r “requirements.txt” 这句话本质上是要安装这四个插件,这些插件做为开源项目,版本不停迭代更新,就目前(20220123)这些都有更新的版本,如果直接 pip install -r “requirements.txt” ,很可能会因为找不到这些老旧的版本而卡住,所以直接安装最新版本就可以。稍微解释下这个四个插件的用途,- PyQt5是图形界面,SimpleFOCStudio的界面运行在这个插件上,没有它界面打不开;
- pyqtgraph是画图的,电机运动的波形绘制需要这个插件;
- pyserial是负责串口的插件,软硬件的通信是通过串口实现的;
- numpy是负责计算的插件,类似keil中的math.h头文件。
- 上面的三步做完以后,也就安装好了编译环境和插件,python simpleFOCStudio.py 运行软件。
1.2、安装python
1.2.1、python官网下载:www.python.org
1.2.2、下载后安装

1.2.3、等待安装完毕
1.2.4、验证是否安装成功
按 WIN+R 组合键(WIN键就是左下角的第二个键),电脑左下角弹出小窗口,输入“cmd”
1.2.5、在弹出的黑窗口中输入“python”,回车;有如下输出表示安装成功(版本不同输出略有不同),
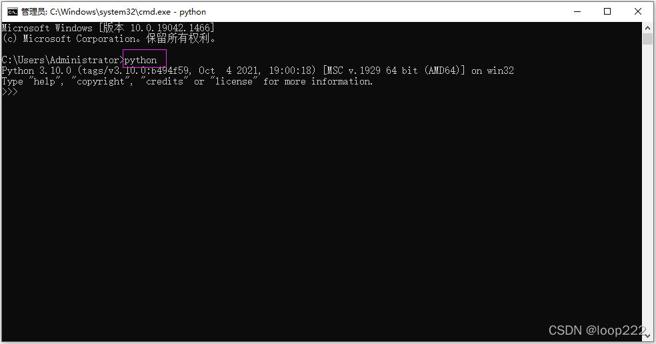
输入 exit() 并回车,退出交互模式;或者直接关闭黑窗口。
1.3、下载simplefocstudio
1.3.1、github下载网址:https://github.com/JorgeMaker/SimpleFOCStudio/tree/main,国外网站时好时坏,多点几次。
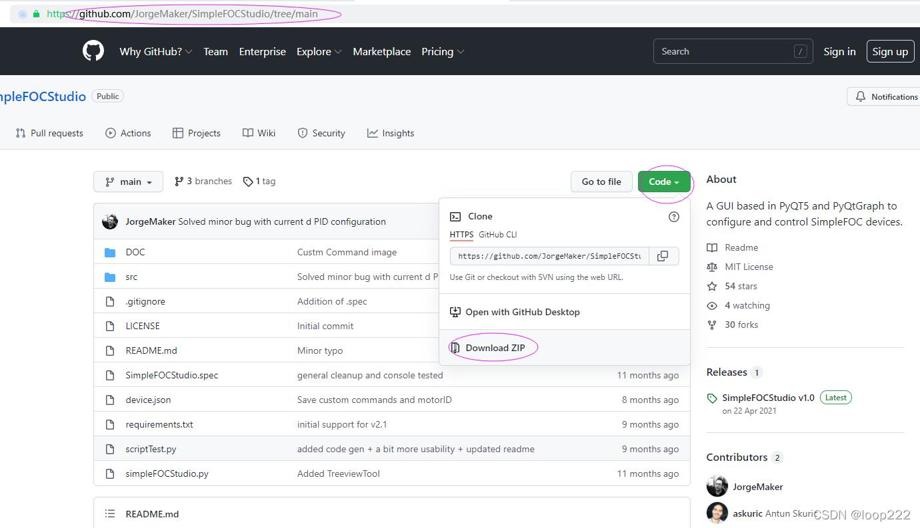
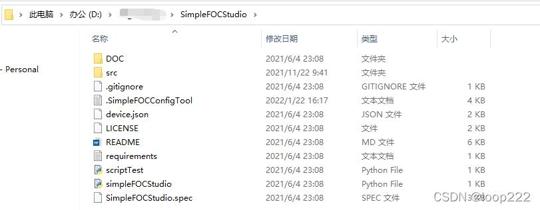
1.3.2、下载的代码放到不含中文的路径中,方便稍后的操作
1.4、安装插件
按照官方的说法 pip install -r “requirements.txt” ,你可以试下,如果一切顺利那再好不过。但是这条指令的输入需要先选择 requirements.txt 这个文件所在的路径,方法看下面的1.5;
本人操作时候卡住了,所以一个个安装比较可靠,方法如下:
1.4.1、WIN+R组合键调出小窗口,输入“cmd”
1.4.2、在弹出的黑窗口分别输入以下指令,每次输入一个,等待安装完毕后再输入下一个,其中安装pyqtgraph时顺便安装了numpy,所以四个插件只需输入三次指令。有些插件的安装可能会卡顿迟缓,请耐心等待。
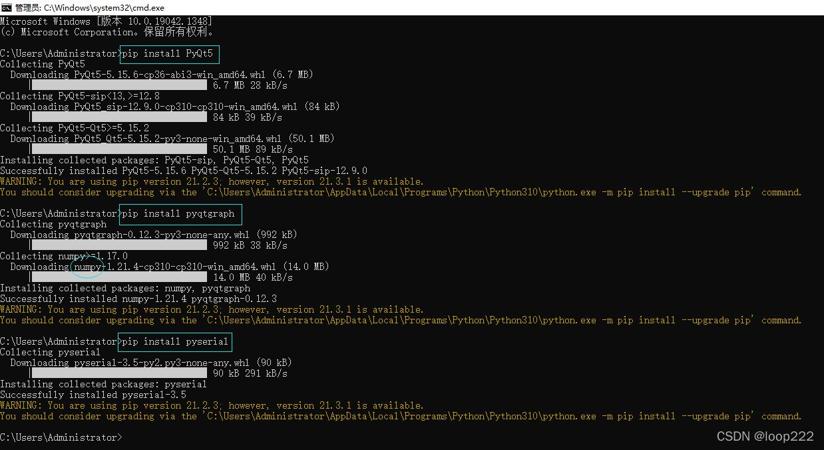
pip install PyQt5
pip install pyqtgraph
pip install pyserial
- 1
- 2
- 3
1.5、运行SimpleFOCStudio
1.5.1、WIN+R组合键调出小窗口,输入“cmd”,在黑窗口中输入 SimpleFOCStudio 文件下载的路径,输入运行指令:python simpleFOCStudio.py,

d:
cd ******SimpleFOCStudio
python simpleFOCStudio.py
- 1
- 2
- 3
1.5.2、运行指令后软件打开
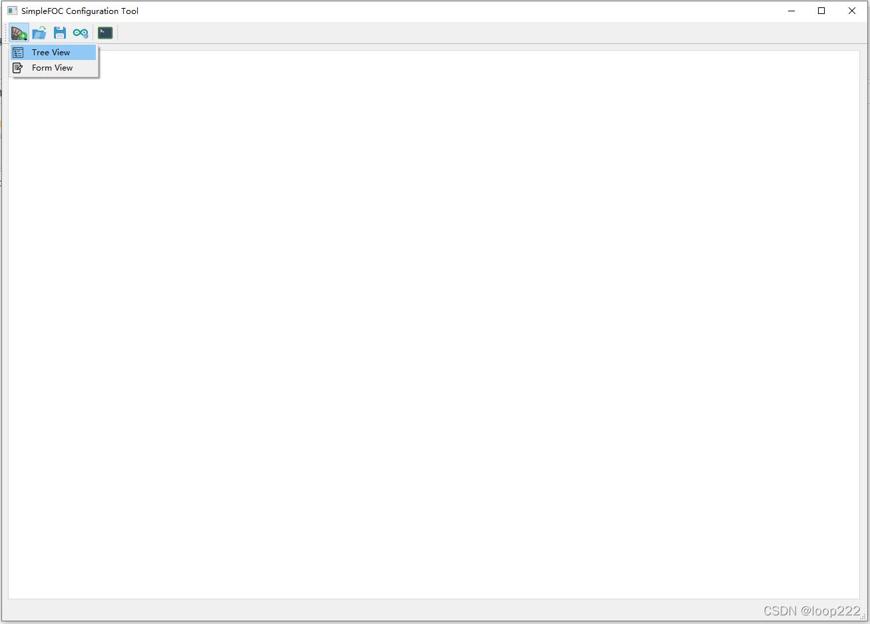
1.5.3、选择 Tree View
二、硬件代码
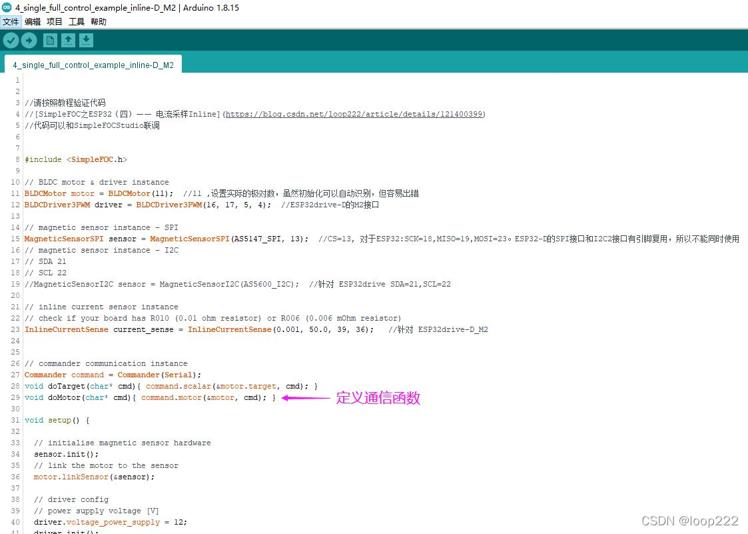
2.1、添加通信函数
要和SimpleFOCStudio上位机通信,主要是把通信的函数加入到simpleFOC的代码中,通信的函数是
void onMotor(char* cmd){ command.motor(&motor, cmd); } //定义函数
command.add('M',onMotor,"my motor"); //setup中加入这个函数
motor.monitor(); //loop中加入这个函数,使用simpleFOC Studio上位机设置的时候,这句一定要打开。会影响程序执行速度,慎用
- 1
- 2
- 3
只需要增加这三句代码就可以实现和SimpleFOCStudio的通信,函数名字可能略有不同,但函数形式一样。
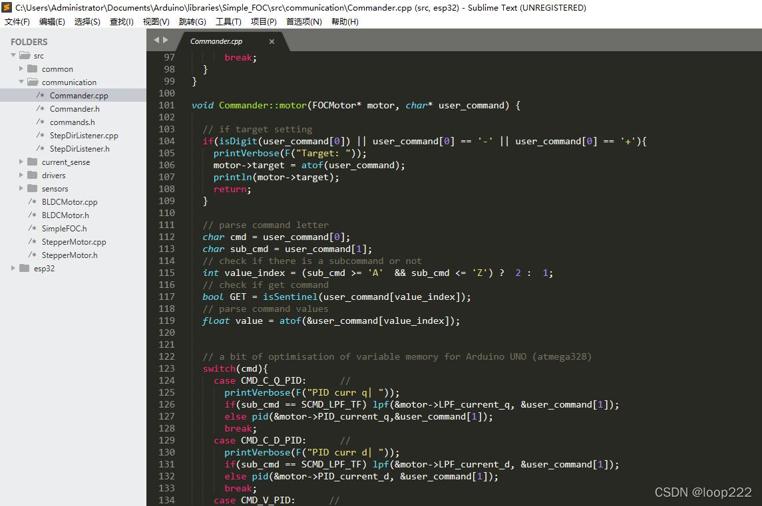
2.2、通信函数源码和路径
在simpleFOC库中的路径如下,有兴趣可以研究下(下图所用编辑器为sublime),
2.3、Arduino UNO示例
网上能找到的SimpleFOCStudio安装教程,一般用的是Arduino UNO,
#include 
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
2.4、ESP32示例
UNO的速度比较慢,所以本人用ESP32的示例,具体可以到对应教程中查看。
三、软硬件联调
3.1、硬件连接
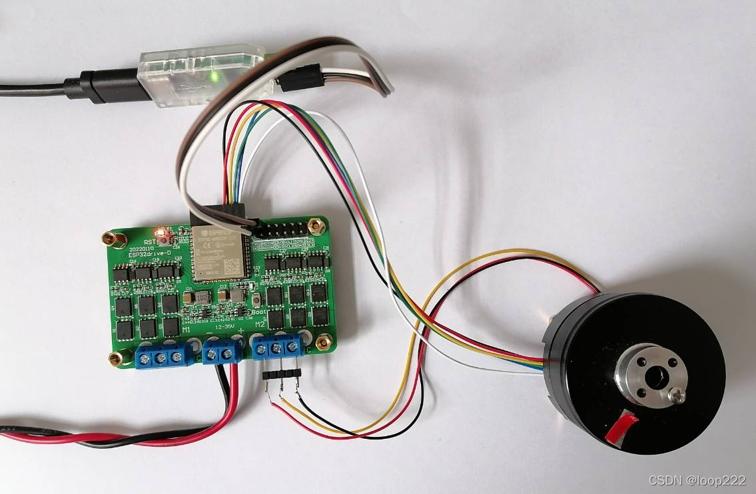
电机 购买链接:某宝购买
ESP32drive 购买链接:某宝购买
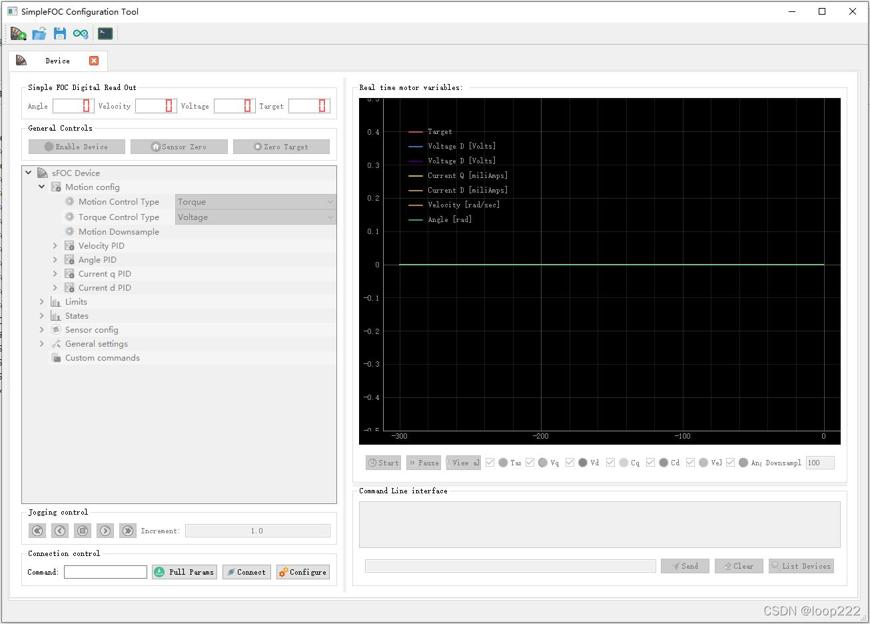
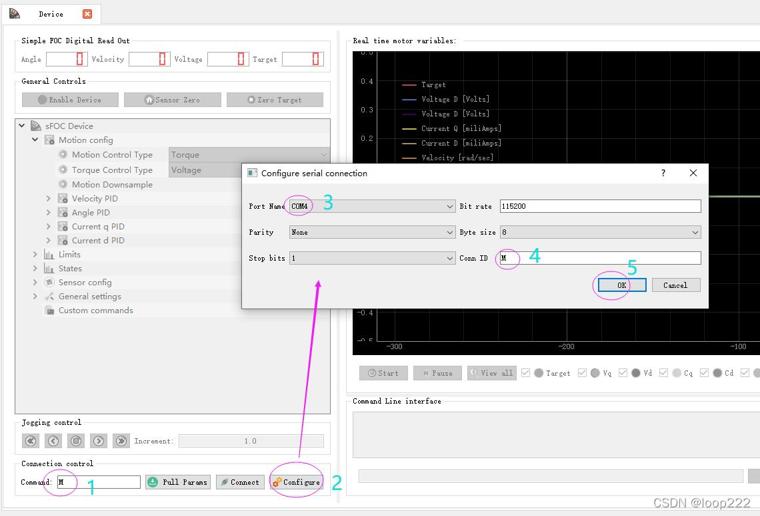
3.2、打开SimpleFOCStudio并配置
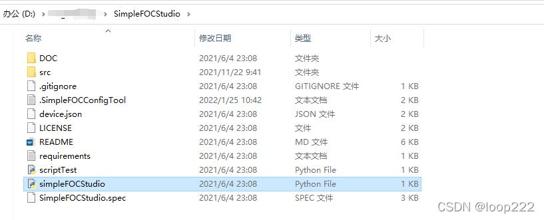
- 通过黑窗口输入路径打开,比较繁琐,
- 可以找到文件夹,双击simpleFOCStudio.py文件 打开软件,如下:
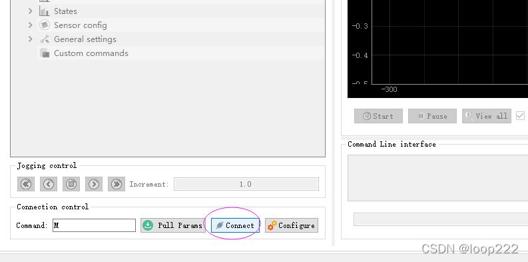
3.3、点击Connect
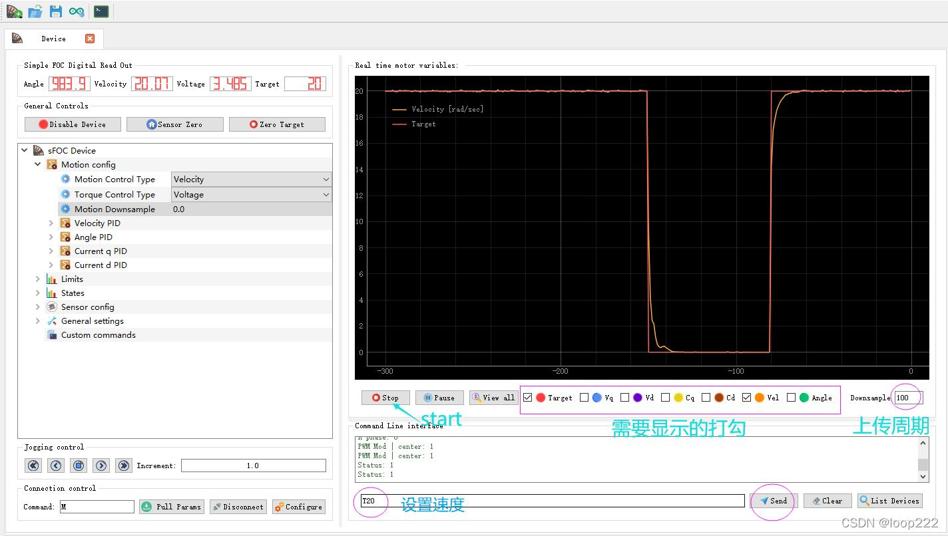
3.4、点击Start
上传周期可修改为稍大一点,数据上传太频繁影响电机运行效果,
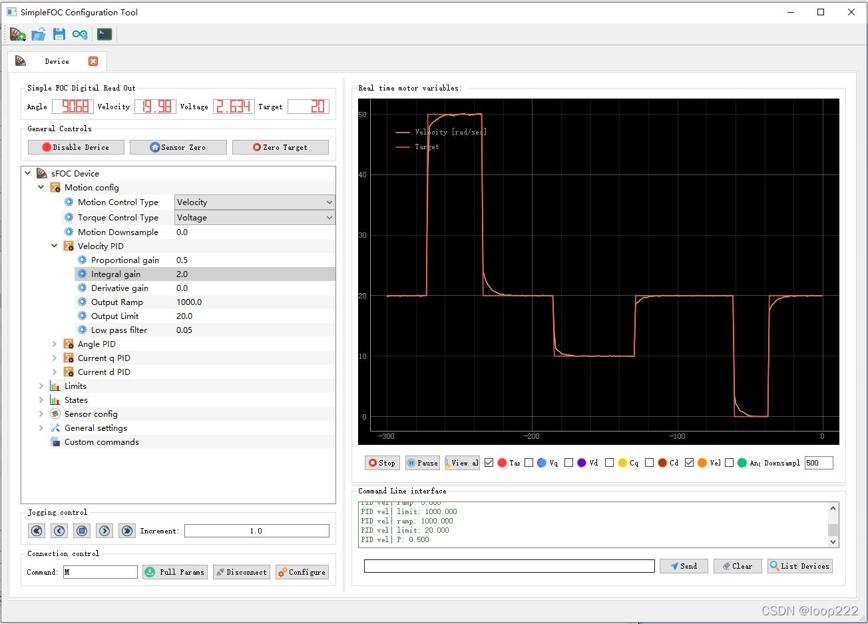
四、PID调参
- 不同电机,不同驱动板的PID参数是不一样的,PID参数完全是一个经验值,需要反复的实验验证,找到最优值,本节只讲下大概的方法,仅供参考。
- 新手调参推荐用云台电机,电机内阻大,不容易烧坏;
- 先调试电流环的PI参数,再调试速度环的PI参数,最后再调试位置环的PI参数;
- 如果用电压模式,可以直接调试速度环的PI参数;
- 设置I=0,调试P,待P参数差不多时再添加I参数,参数从小向大逐渐增加;
- P太大会过冲,P太小会不足,达不到设定值;
- I参数实在调不了就设置为0,只有P参数电机也能转;
通过软件多次修改参数后,电机运行似乎不准,可以重启下单片机。
写本文时参考了这篇文章,大家可以对比阅读:SimpleFOC图形上位机SimpleFOC Stuido的使用
(完)
欢迎加入simpleFOC技术交流群:923734429 群已满根据提示添加新群 (入群申请写:CSDN)
评论记录:
回复评论: