
SimpleFOC教程目录:请点击
一、硬件介绍
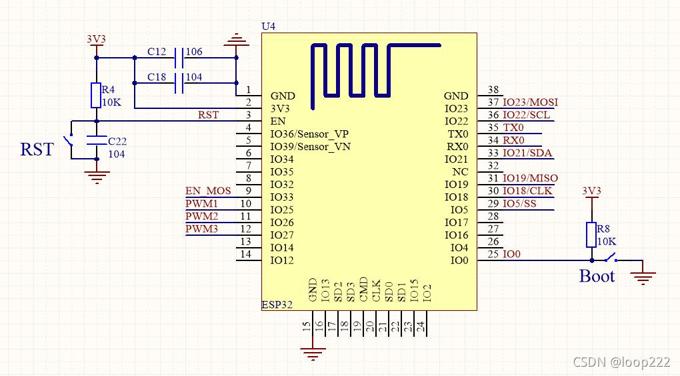
1.1、原理图
1.2、ESP32drive方案
1.2.1、准备清单
| 序号 | 名称 | 数量 |
|---|---|---|
| 1 | USB转串口 | 1 |
| 2 | ESP32drive | 1 |
| 3 | 带编码器电机 | 1 |
| 4 | 12V电源 | 1 |
| 5 | 杜邦线 | 若干 |

电机 购买链接:某宝购买
ESP32drive 购买链接:某宝购买
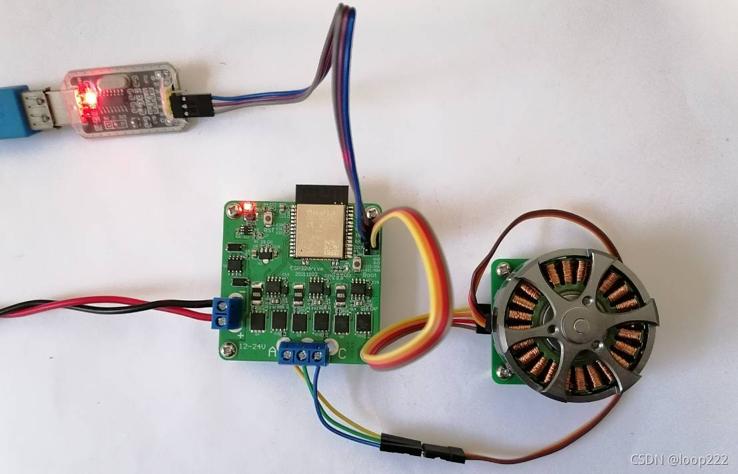
1.2.2、硬件连接
1.3、SimpleFOCShield方案
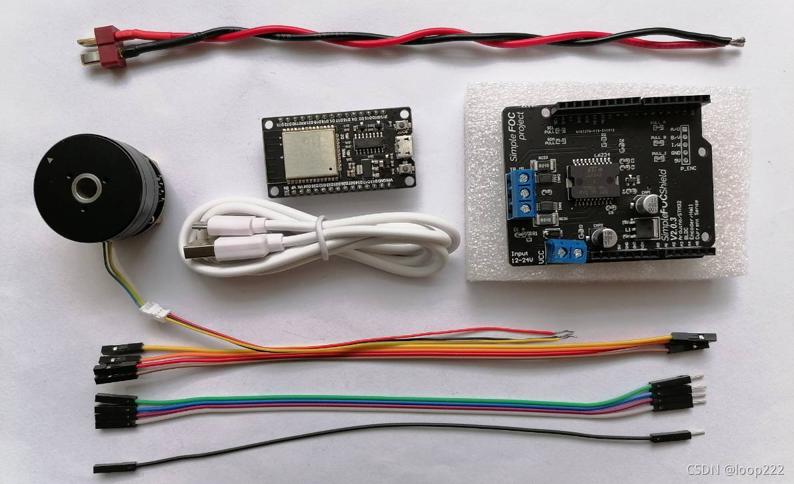
1.3.1、准备清单
| 序号 | 名称 | 数量 |
|---|---|---|
| 1 | ESP32-DevKitC | 1 |
| 2 | simpleFOCShield V2.0.3 | 1 |
| 3 | 云台电机 | 1 |
| 4 | USB线 | 1 |
| 5 | 12V电源 | 1 |
| 6 | 杜邦线 | 若干 |
电机 购买链接:某宝购买
SimpleFOCShield 购买链接:某宝购买
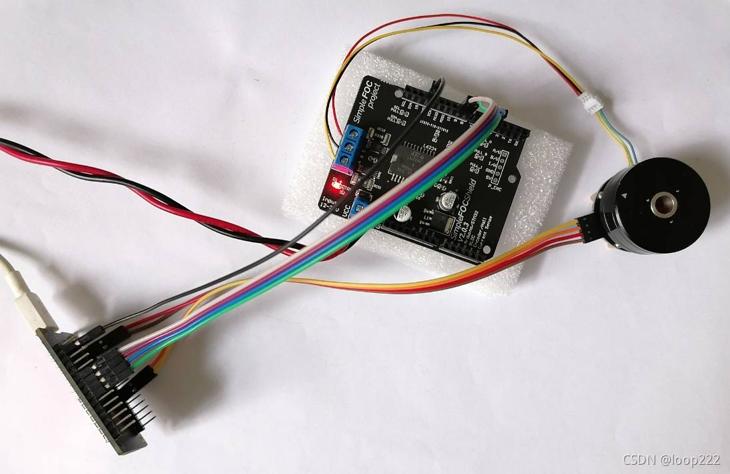
1.3.2、硬件连接
| ESP32-DevKitC | V2.0.3 |
|---|---|
| 25 | 5 |
| 26 | 9 |
| 27 | 6 |
| 33 | 8 |
| 3V3 | 3V3 |
| GND | GND |
如果是AS5600编码器,如下
| ESP32-DevKitC | AS5600电机 |
|---|---|
| 22 | SCL |
| 21 | SDA |
| 3V3 | VCC |
| GND | GND |
如果是AS5047编码器,如下
| ESP32-DevKitC | AS5047P电机 |
|---|---|
| 23 | MOSI |
| 19 | MISO |
| 18 | SCLK |
| 5 | SS |
| GND | GND |
| 3V3 | VCC |
ESP32最小系统板和驱动板共地
二、代码演示 — I2C接口
2.1、I2C接口说明
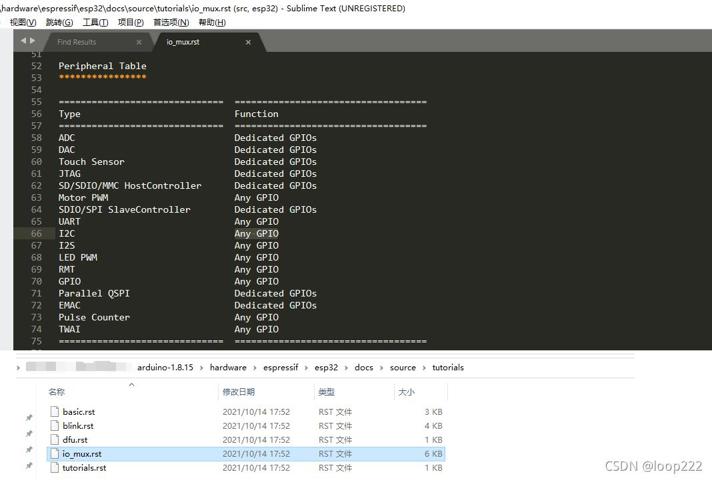
2.1.1、ESP32有GPIO交换矩阵(IO_MUX),所以I2C接口可以配置为任意IO口;
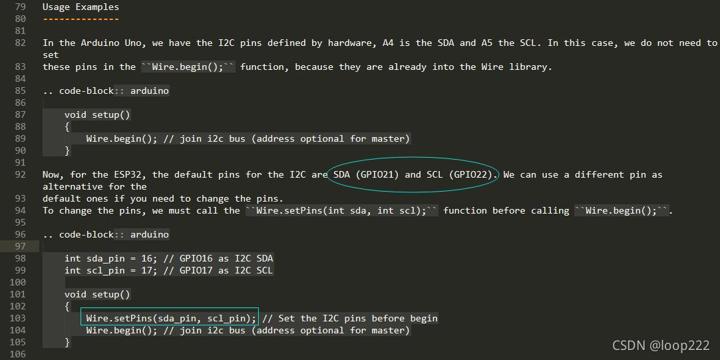
2.1.2、在ESP提供的驱动中,I2C接口默认为GPIO21和22,如需修改引脚可参考图中;
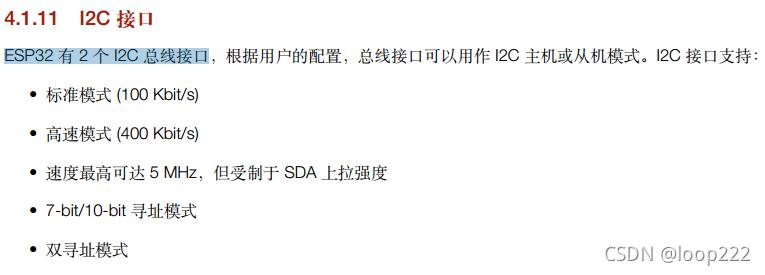
2.1.3、ESP32有2个I2C接口,驱动中已经声明了两个I2C的结构体:Wire和Wire1

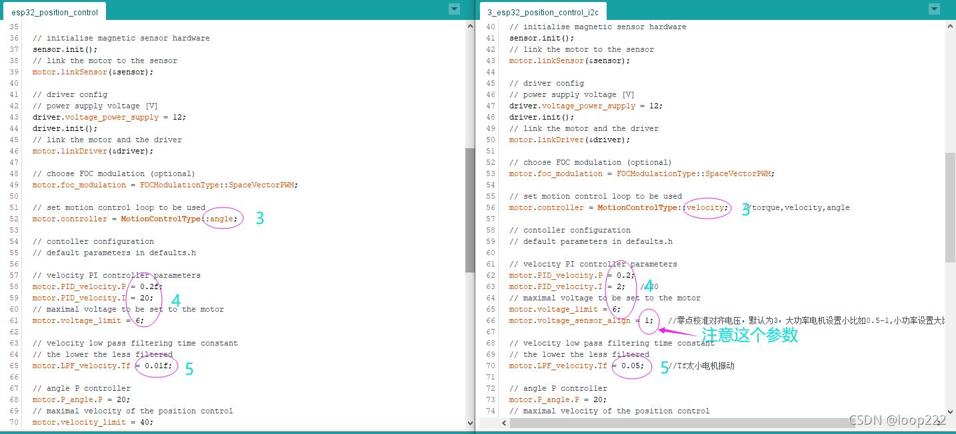
2.2、速度模式
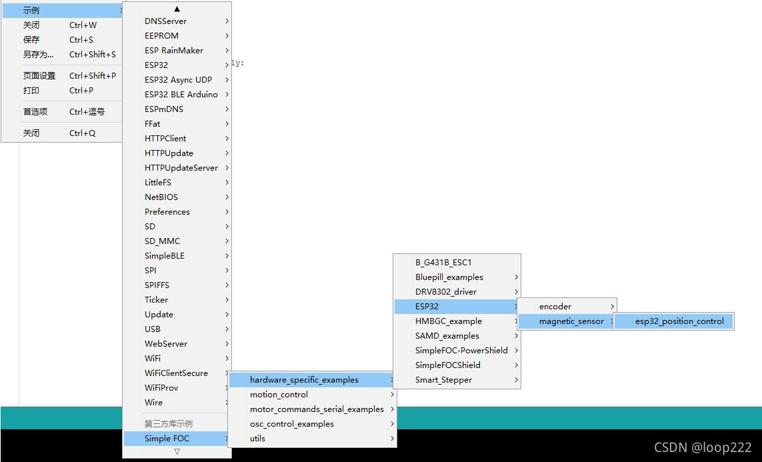
2.2.1、打开示例
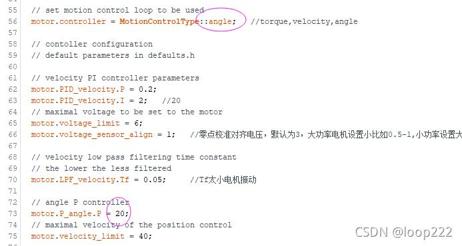
这个示例为角度模式,但是只需修改下控制模式就可以更改为速度模式,
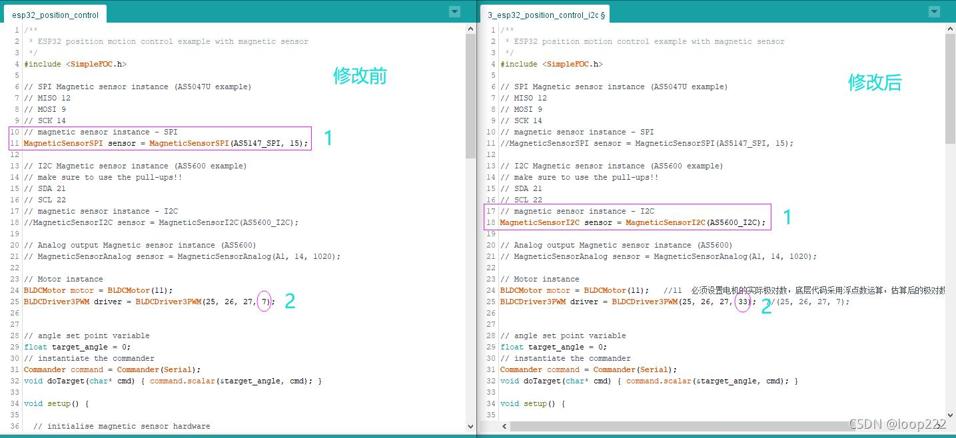
2.2.2、修改程序
示例为只读文件,修改需先另存为,
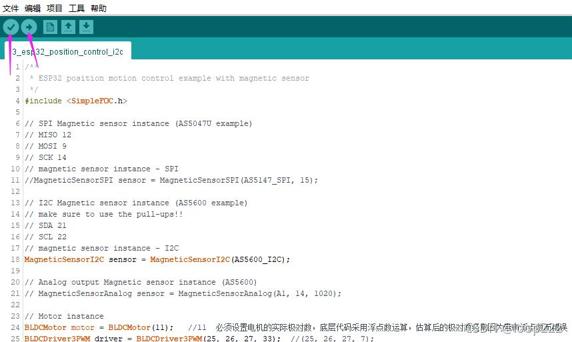
2.2.3、验证上传
上传完毕后,按复位键重启。
2.2.4、串口发送指令
输入T20,T为指令,20表示20rad/s,
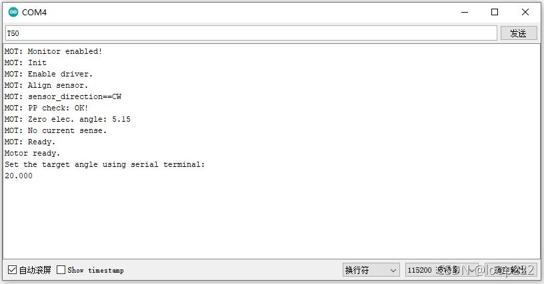
2.2.5、观察电机运行
2.3、位置模式
修改控制模式为角度模式,根据实际情况调整下PID,其它与速度模式一样,这个代码本来就是角度模式的示例;
三、代码演示 — SPI接口
3.1、SPI接口说明
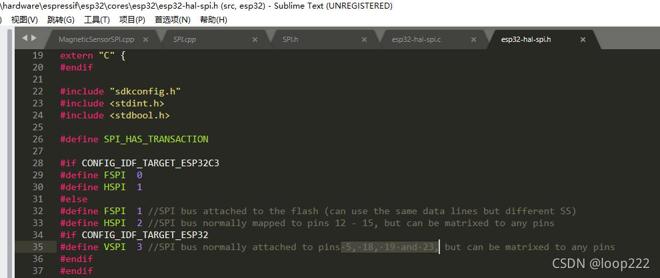
翻遍代码,阅尽人间繁华,终于找到了对SPI接口引脚的定义,
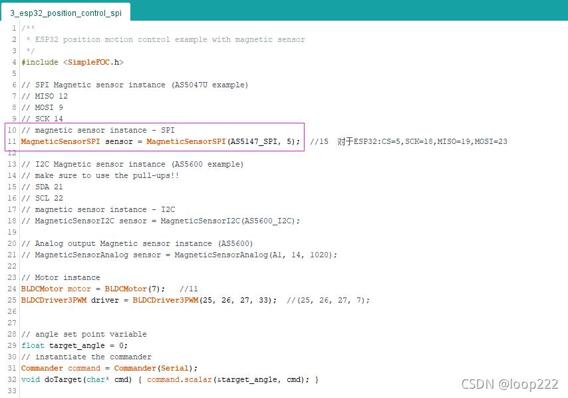
3.2、修改示例
这个示例本来就是SPI接口的,把第1个修改点改回去就行,其它不用动,
其它操作参考上面的I2C接口的修改,如果是直接在上面I2C的基础上修改,注意根据电机类型的差异修改对应的参数,比如:极对数、voltage_sensor_align和PID等。
(完)
请继续阅读相关文章:
SimpleFOC之ESP32(一)—— 搭建开发环境
SimpleFOC之ESP32(二)—— 开环控制
SimpleFOC之ESP32(三)—— 闭环控制
SimpleFOC之ESP32(四)—— 电流闭环控制Inline
SimpleFOC之ESP32(五)—— 电流闭环控制Lowside
SimpleFOC之ESP32(六)—— 双电机控制
SimpleFOC之ESP32(七)—— 霍尔电机
SimpleFOC之ESP32(八)—— ABZ编码器电机
SimpleFOC之ESP32(九)—— WIFI、UDP和TCP
SimpleFOC之ESP32(十)—— ESP-NOW和力矩反馈
评论记录:
回复评论: