
安卓直播推流专栏博客总结
0 . 资源和源码地址 :
- 资源下载地址 : 资源下载地址 , 服务器搭建 , x264 , faac , RTMPDump , 源码及交叉编译库 , 本专栏 Android 直播推流源码 ;
- GitHub 源码地址 : han1202012 / RTMP_Pusher
1. 搭建 RTMP 服务器 : 下面的博客中讲解了如何在 VMWare 虚拟机中搭建 RTMP 直播推流服务器 ;
2. 准备视频编码的 x264 编码器开源库 , 和 RTMP 数据包封装开源库 :
-
【Android RTMP】RTMPDumb 源码导入 Android Studio ( 交叉编译 | 配置 CMakeList.txt 构建脚本 )
-
【Android RTMP】Android Studio 集成 x264 开源库 ( Ubuntu 交叉编译 | Android Studio 导入函数库 )
3. 讲解 RTMP 数据包封装格式 :
4. 图像数据采集 : 从 Camera 摄像头中采集 NV21 格式的图像数据 , 并预览该数据 ;
-
【Android RTMP】Android Camera 视频数据采集预览 ( 视频采集相关概念 | 摄像头预览参数设置 | 摄像头预览数据回调接口 )
-
【Android RTMP】Android Camera 视频数据采集预览 ( NV21 图像格式 | I420 图像格式 | NV21 与 I420 格式对比 | NV21 转 I420 算法 )
-
【Android RTMP】Android Camera 视频数据采集预览 ( 图像传感器方向设置 | Camera 使用流程 | 动态权限申请 )
5. NV21 格式的图像数据编码成 H.264 格式的视频数据 :
-
【Android RTMP】x264 编码器初始化及设置 ( 获取 x264 编码参数 | 编码规格 | 码率 | 帧率 | B帧个数 | 关键帧间隔 | 关键帧解码数据 SPS PPS )
-
【Android RTMP】x264 图像数据编码 ( Camera 图像数据采集 | NV21 图像数据传到 Native 处理 | JNI 传输字节数组 | 局部引用变量处理 | 线程互斥 )
-
【Android RTMP】x264 图像数据编码 ( NV21 格式中的 YUV 数据排列 | Y 灰度数据拷贝 | U 色彩值数据拷贝 | V 饱和度数据拷贝 | 图像编码操作 )
6. 将 H.264 格式的视频数据封装到 RTMP 数据包中 :
-
【Android RTMP】RTMPDump 封装 RTMPPacket 数据包 ( 封装 SPS / PPS 数据包 )
-
【Android RTMP】RTMPDump 封装 RTMPPacket 数据包 ( 关键帧数据格式 | 非关键帧数据格式 | x264 编码后的数据处理 | 封装 H.264 视频数据帧 )
-
【Android RTMP】RTMPDump 推流过程 ( 独立线程推流 | 创建推流器 | 初始化操作 | 设置推流地址 | 启用写出 | 连接 RTMP 服务器 | 发送 RTMP 数据包 )
7. 阶段总结 : 阿里云服务器中搭建 RTMP 服务器 , 并使用电脑软件推流和观看直播内容 ;
-
【Android RTMP】RTMP 直播推流 ( 阿里云服务器购买 | 远程服务器控制 | 搭建 RTMP 服务器 | 服务器配置 | 推流软件配置 | 直播软件配置 | 推流直播效果展示 )
-
【Android RTMP】RTMP 直播推流阶段总结 ( 服务器端搭建 | Android 手机端编码推流 | 电脑端观看直播 | 服务器状态查看 )
8. 处理 Camera 图像传感器导致的 NV21 格式图像旋转问题 :
-
【Android RTMP】NV21 图像旋转处理 ( 问题描述 | 图像顺时针旋转 90 度方案 | YUV 图像旋转细节 | 手机屏幕旋转方向 )
-
【Android RTMP】NV21 图像旋转处理 ( 图像旋转算法 | 后置摄像头顺时针旋转 90 度 | 前置摄像头顺时针旋转 90 度 )
9. 下面这篇博客比较重要 , 里面有一个快速搭建 RTMP 服务器的脚本 , 强烈建议使用 ;
10. 编码 AAC 音频数据的开源库 FAAC 交叉编译与 Android Studio 环境搭建 :
-
【Android RTMP】音频数据采集编码 ( 音频数据采集编码 | AAC 高级音频编码 | FAAC 编码器 | Ubuntu 交叉编译 FAAC 编码器 )
-
【Android RTMP】音频数据采集编码 ( FAAC 头文件与静态库拷贝到 AS | CMakeList.txt 配置 FAAC | AudioRecord 音频采样 PCM 格式 )
11. 解析 AAC 音频格式 :
12 . 将麦克风采集的 PCM 音频采样编码成 AAC 格式音频 , 并封装到 RTMP 包中 , 推流到客户端 :
-
【Android RTMP】音频数据采集编码 ( FAAC 音频编码参数设置 | FAAC 编码器创建 | 获取编码器参数 | 设置 AAC 编码规格 | 设置编码器输入输出参数 )
-
【Android RTMP】音频数据采集编码 ( FAAC 编码器编码 AAC 音频解码信息 | 封装 RTMP 音频数据头 | 设置 AAC 音频数据类型 | 封装 RTMP 数据包 )
-
【Android RTMP】音频数据采集编码 ( FAAC 编码器编码 AAC 音频采样数据 | 封装 RTMP 音频数据头 | 设置 AAC 音频数据类型 | 封装 RTMP 数据包 )
Android 直播推流流程 : 手机采集视频 / 音频数据 , 视频数据使用 H.264 编码 , 音频数据使用 AAC 编码 , 最后将音视频数据都打包到 RTMP 数据包中 , 使用 RTMP 协议上传到 RTMP 服务器中 ;
Android 端中主要完成手机端采集视频数据操作 , 并将视频数据传递给 JNI , 在 NDK 中使用 x264 将图像转为 H.264 格式的视频 , 最后将 H.264 格式的视频打包到 RTMP 数据包中 , 上传到 RTMP 服务器中 ;
本博客中实现将 NV21 图像顺时针旋转 90 度的算法 , 后置摄像头需要顺时针旋转 90 度, 前置摄像头与后置摄像头相反 , 需要逆时针旋转 90 度 ;
一、 后置摄像头顺时针旋转 90 度
1 . NV21 格式图像数据的排列 : 16 16 16 个 Y 灰度数据在前 , 然后 4 4 4 组 ( 8 8 8 个 ) VU 色彩值 , 饱和度 , 数据交替存放 ;
[
y
1
y
2
y
3
y
4
y
5
y
6
y
7
y
8
y
9
y
10
y
11
y
12
y
13
y
14
y
15
y
16
v
1
u
1
v
2
u
2
v
3
u
3
v
4
u
4
]
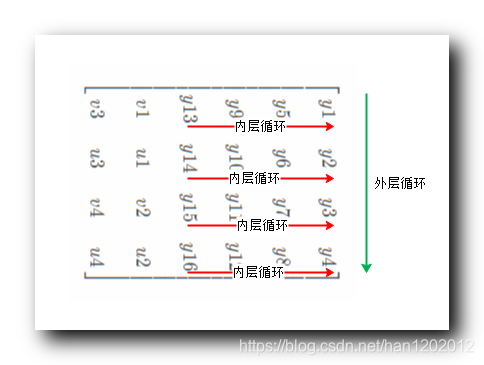
2 . NV21 格式的图像的 YUV 值顺时针旋转 90 度后的 YUV 矩阵为 :
[
y
13
y
9
y
5
y
1
y
14
y
10
y
6
y
2
y
15
y
11
y
7
y
3
y
16
y
12
y
8
y
4
v
3
u
3
v
1
u
1
v
4
u
4
v
2
u
2
]
3 . 灰度值 Y 数据读取顺序 :
① 外层循环 : 逐行遍历, 从第一行遍历到最后一行, 从 0 到 mWidth - 1 ;
② 内存循环 : 遍历每一行时, 从底部遍历到顶部, 从 mHeight - 1 到 0 ;
for (int i = 0; i < mWidth; i++) {
// 第 i 行, 从每一列的最后一个像素 ( 索引 mHeight - 1 ) 遍历到第一个像素 ( 索引 0 )
for (int j = mHeight - 1; j >= 0; j--) {
// 将读取到的 Y 灰度值存储到 mNv21DataBuffer 缓冲区中
mNv21DataBuffer[positionIndex++] = data[mWidth * j + i];
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
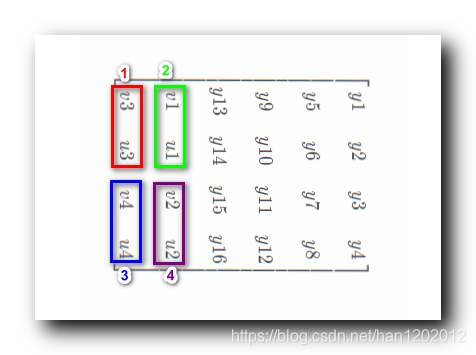
4 . 饱和度 色彩值 UV 数据读取顺序 :
① 数据高度个数 : Y 数据的高度与图像高度相等 , UV 数据高度相当于 Y 数据高度的一半 ;
② UV 数据排列 : V 色彩值在前, U 饱和度在后, UV 数据交替排列 , 一行 mWidth 中, 排布了 mWidth / 2 组 UV 数据 ;
③ UV 数据组有 mWidth / 2 行, mHeight / 2 列, 因此遍历时, 有如下规则 :
- 按照行遍历 : 遍历 mWidth / 2 次
- 按照列遍历 : 遍历 mHeight / 2 次
④ 外层遍历 : 每隔 2 行, 遍历一次, 遍历 mWidth / 2 次 ; 遍历行从 0 到 mWidth / 2 - 1 ;
⑤ 内层遍历 : UV 数据也需要倒着读 , 从 mHeight / 2 - 1 遍历到 0 ;
for (int i = 0; i < mWidth / 2; i ++) {
for (int j = UVByteHeight - 1; j >= 0; j--) {
// 读取数据时, 要从 YByteCount 之后的数据开始遍历
// 使用 mWidth 和 UVByteHeight 定位要遍历的位置
// 拷贝 V 色彩值数据
mNv21DataBuffer[positionIndex++] = data[YByteCount + mWidth / 2 * 2 * j + i];
// 拷贝 U 饱和度数据
mNv21DataBuffer[positionIndex++] = data[YByteCount + mWidth / 2 * 2 * j + i + 1];
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
二、 前置摄像头顺时针旋转 90 度
1 . NV21 格式图像数据的排列 : 16 16 16 个 Y 灰度数据在前 , 然后 4 4 4 组 ( 8 8 8 个 ) VU 色彩值 , 饱和度 , 数据交替存放 ;
[
y
1
y
2
y
3
y
4
y
5
y
6
y
7
y
8
y
9
y
10
y
11
y
12
y
13
y
14
y
15
y
16
v
1
u
1
v
2
u
2
v
3
u
3
v
4
u
4
]
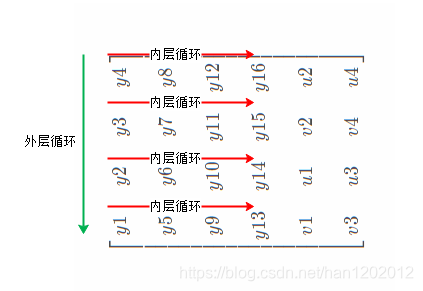
2 . NV21 格式的图像的 YUV 值逆时针旋转 90 度后的 YUV 矩阵为 :
[
y
4
y
8
y
12
y
16
y
3
y
7
y
11
y
15
y
2
y
6
y
10
y
14
y
1
y
5
y
9
y
13
v
2
u
2
v
4
u
4
v
1
u
1
v
3
u
3
]
3 . 灰度值 Y 数据读取顺序 :
① 外层循环 : 逐行遍历, 从最后一行遍历到第一行, 从 mWidth - 1 到 0 ;
② 内存循环 : 遍历第 i 行时, 从顶部遍历到底部, 从 0 到 mHeight - 1
for (int i = mWidth - 1; i >= 0; i--) {
// 第 i 行, 从每一列的最后一个像素 ( 索引 mHeight - 1 ) 遍历到第一个像素 ( 索引 0 )
for (int j = 0; j < mHeight; j++) {
// 将读取到的 Y 灰度值存储到 mNv21DataBuffer 缓冲区中
mNv21DataBuffer[positionIndex++] = data[mWidth * j + i];
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
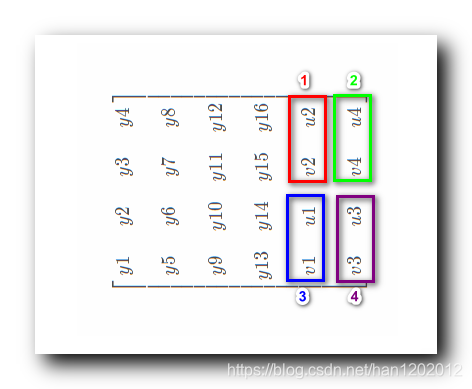
4 . 饱和度 色彩值 UV 数据读取顺序 :
① 数据高度个数 : Y 数据的高度与图像高度相等 , UV 数据高度相当于 Y 数据高度的一半 ;
② UV 数据排列 : V 色彩值在前, U 饱和度在后, UV 数据交替排列 , 一行 mWidth 中, 排布了 mWidth / 2 组 UV 数据 ;
③ UV 数据组有 mWidth / 2 行, mHeight / 2 列, 因此遍历时, 有如下规则 :
- 按照行遍历 : 遍历 mWidth / 2 次
- 按照列遍历 : 遍历 mHeight / 2 次
④ 外层遍历 : 每隔 2 行, 遍历一次, 遍历 mWidth / 2 次 ; 遍历行从mWidth / 2 - 1 到 0 ;
⑤ 内层遍历 : UV 数据也需要倒着读 , 从 0 遍历到 mHeight / 2 - 1 ;
for (int i = mWidth / 2 - 1; i >= 0 ; i --) {
for (int j = 0; j < UVByteHeight; j++) {
// 读取数据时, 要从 YByteCount 之后的数据开始遍历
// 使用 mWidth 和 UVByteHeight 定位要遍历的位置
// 拷贝 V 色彩值数据
mNv21DataBuffer[positionIndex++] = data[YByteCount + mWidth / 2 * 2 * j + i];
// 拷贝 U 饱和度数据
mNv21DataBuffer[positionIndex++] = data[YByteCount + mWidth / 2 * 2 * j + i + 1];
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
三、 NV21 格式图像旋转代码
/**
* 将 NV21 格式的图片数据顺时针旋转 90 度
* 后置摄像头顺时针旋转 90 度
* 前置摄像头逆时针旋转 90 度
* @param data
*/
private void nv21PictureDataClockwiseRotation90(byte[] data){
// Y 灰度数据的个数
int YByteCount = mWidth * mHeight;
// 色彩度 U, 饱和度 V 数据高度
int UVByteHeight = mHeight / 2;
// 色彩度 U, 饱和度 V 数据个数
int UVByteCount = YByteCount / 4;
// 数据处理索引值, 用于记录写入到 mNv21DataBuffer 中的元素个数
// 及下一个将要写入的元素的索引
int positionIndex = 0;
/*
后置摄像头处理
后置摄像头需要将图像顺时针旋转 90 度
*/
if(mCameraFacing == Camera.CameraInfo.CAMERA_FACING_BACK){
/*
读取 Y 灰度数据
顺时针旋转 90 度
外层循环 : 逐行遍历, 从第一行遍历到最后一行
内存循环 : 遍历每一行时, 从底部遍历到顶部
*/
for (int i = 0; i < mWidth; i++) {
// 第 i 行, 从每一列的最后一个像素 ( 索引 mHeight - 1 ) 遍历到第一个像素 ( 索引 0 )
for (int j = mHeight - 1; j >= 0; j--) {
// 将读取到的 Y 灰度值存储到 mNv21DataBuffer 缓冲区中
mNv21DataBuffer[positionIndex++] = data[mWidth * j + i];
}
}
/*
读取 UV 数据
Y 数据的高度与图像高度相等
UV 数据高度相当于 Y 数据高度的一半
UV 数据排列 : V 色彩值在前, U 饱和度在后, UV 数据交替排列
UV 数据交替排列, 一行 mWidth 中, 排布了 mWidth / 2 组 UV 数据
UV 数据组有 mWidth / 2 行, mHeight / 2 列, 因此遍历时, 有如下规则 :
按照行遍历 : 遍历 mWidth / 2 次
按照列遍历 : 遍历 mHeight / 2 次
外层遍历 : 遍历行从 0 到 mWidth / 2
外层按照行遍历时, 每隔 2 行, 遍历一次, 遍历 mWidth / 2 次
内层遍历时 : 遍历列, 从 mHeight / 2 - 1 遍历到 0
UV 数据也需要倒着读 , 从 mHeight / 2 - 1 遍历到 0
*/
for (int i = 0; i < mWidth / 2; i ++) {
for (int j = UVByteHeight - 1; j >= 0; j--) {
// 读取数据时, 要从 YByteCount 之后的数据开始遍历
// 使用 mWidth 和 UVByteHeight 定位要遍历的位置
// 拷贝 V 色彩值数据
mNv21DataBuffer[positionIndex++] = data[YByteCount + mWidth / 2 * 2 * j + i];
// 拷贝 U 饱和度数据
mNv21DataBuffer[positionIndex++] = data[YByteCount + mWidth / 2 * 2 * j + i + 1];
}
}
}else if(mCameraFacing == Camera.CameraInfo.CAMERA_FACING_FRONT){
/*
前置摄像头处理
前置摄像头与后置摄像头相反, 后置摄像头顺时针旋转 90 度
前置摄像头需要将图像逆时针旋转 90 度
*/
/*
读取 Y 灰度数据
逆时针旋转 90 度
外层循环 : 逐行遍历, 从最后一行遍历到第一行, 从 mWidth - 1 到 0
内存循环 : 遍历第 i 行时, 从顶部遍历到底部, 从 0 到 mHeight - 1
*/
for (int i = mWidth - 1; i >= 0; i--) {
// 第 i 行, 从每一列的最后一个像素 ( 索引 mHeight - 1 ) 遍历到第一个像素 ( 索引 0 )
for (int j = 0; j < mHeight; j++) {
// 将读取到的 Y 灰度值存储到 mNv21DataBuffer 缓冲区中
mNv21DataBuffer[positionIndex++] = data[mWidth * j + i];
}
}
/*
读取 UV 数据
Y 数据的高度与图像高度相等
UV 数据高度相当于 Y 数据高度的一半
UV 数据排列 : V 色彩值在前, U 饱和度在后, UV 数据交替排列
UV 数据交替排列, 一行 mWidth 中, 排布了 mWidth / 2 组 UV 数据
UV 数据组有 mWidth / 2 行, mHeight / 2 列, 因此遍历时, 有如下规则 :
按照行遍历 : 遍历 mWidth / 2 次
按照列遍历 : 遍历 mHeight / 2 次
外层遍历 : 遍历行从 mWidth / 2 - 1 到 0
外层按照行遍历时, 每隔 2 行, 遍历一次, 遍历 mWidth / 2 次
内层遍历时 : 遍历列, 从 0 遍历到 mHeight / 2 - 1
UV 数据也需要倒着读 , 从 0 遍历到 mHeight / 2 - 1
*/
for (int i = mWidth / 2 - 1; i >= 0 ; i --) {
for (int j = 0; j < UVByteHeight; j++) {
// 读取数据时, 要从 YByteCount 之后的数据开始遍历
// 使用 mWidth 和 UVByteHeight 定位要遍历的位置
// 拷贝 V 色彩值数据
mNv21DataBuffer[positionIndex++] = data[YByteCount + mWidth / 2 * 2 * j + i];
// 拷贝 U 饱和度数据
mNv21DataBuffer[positionIndex++] = data[YByteCount + mWidth / 2 * 2 * j + i + 1];
}
}
}
}

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
评论记录:
回复评论: