
一、快速点特征直方图(FPFH)描述子介绍
对于具有n个点的给定点云P,点特征直方图(PFH)的理论计算复杂度为O(
n
k
2
nk^2
nk2),其中k为P中的每个点P的邻点数。但是对于有效率要求或点数量极大的情况,例如稠密点特征计算,PFH的计算复杂度将难以满足要求。有关PFH的内容查看上一篇文章。
为解决PFH的计算复杂度问题,前辈们将PFH公式进行了简化,形成了快速点特征直方图(FPFH),它将算法的计算复杂度降低到O(nk)级别,同时仍然保留PFH的大部分能力。
1、快速点特征直方图原理简述
为了解什么是快速点特征直方图,请务必学习上一篇关于点特征直方图的原理。
再点特征直方图原理的基础上,FPFH对其进行了如下的简化:
第一步(SPFH):将每个待计算点
p
q
p_q
pq和其邻近点之间对应的一组元组
⟨
\langle
⟨
α
\alpha
α,
ϕ
\phi
ϕ,
θ
\theta
θ
⟩
\rangle
⟩称为简化点特征直方图(SPFH),与PFH的直接区别是减少了邻近点之间的参数元组,只计算待计算点到其邻近点之间的参数元组。
第二步(FPFH):对于每一个点,重新确定它的k个邻居,用相邻点的SPFH对
p
q
p_q
pq的最终直方图进行加权,如下式所示

其中,权值
ω
i
\omega_i
ωi表示在某些给定度量空间中待计算点
p
q
p_q
pq和相邻点
p
i
p_i
pi之间的距离,从而为
(
p
q
,
p
i
)
(p_q, p_i)
(pq,pi)加权,但也可以在必要时选择不同的度量值。为了理解这种加权方案的重要性,下图给出了以
p
q
p_q
pq为中心的k-邻域影响区域图。
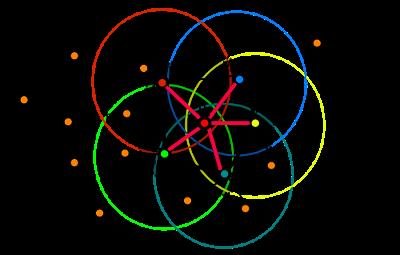
因此,对于给定的
p
q
p_q
pq,算法首先通过在它自己和它的邻点估计它的SPFH值(用红线表示)。对数据集中的所有点重复这一操作,然后使用它的k个邻居的SPFH值对
p
q
p_q
pq的SPFH值进行重新加权,从而为
p
q
p_q
pq创建FPFH。这种操作会有一些点对的参数元组将被计算两次(在图中用较粗的线标记)
2、PFH和FPFH的异同
PFH和FPFH配方之间的主要区别总结如下:
1.从图中可以看出,FPFH并不完全连接
p
q
p_q
pq的所有邻居,因此缺少一些值对,这可能有助于捕获点周围的几何图形;
2.PFH模型精确确定待计算点的周围,而FPFH包括超半径球面(最多2r球面)内的其他邻点信息;
3.由于重新加权的方法,FPFH结合了SPFH值,并重新捕获了一些邻近点;
4.FPFH的总体复杂度大大降低,从而使其可以在实时应用中使用;
5.最终的直方图通过解关联这些FPFH值来简化,也就是简单地创建很多个独立的特征直方图,每个特征维度创建一个,然后将它们连接在一起(见下图)。
二、示例代码分析
快速点特征直方图在PCL中作为pcl_features库的一部分。默认的FPFH实现使用11个细分单元(例如,四个特征值中的每一个都会从其值区间中使用这么多的细分单元),和一个不相关的方案(见上面:特征直方图分别计算后再联接),这将产生一个33字节的浮点值数组。它们存储在pcl::FPFHSignature33点类型中。下面的代码片段将估计输入数据集中所有点的一组FPFH特性。
#include 
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
fpfhestimate类的实际计算调用在其内部只做如下工作:
// 伪代码部分
for each point p in cloud P //遍历点云中每一个点
// 步骤一
1. pass 1:
// 获取p的最邻近点集
1. get the nearest neighbors of :math:`p`
// 获取p到邻域所有pi的点之间的三个角度值
2. for each pair of :math:`p, p_i` (where :math:`p_i` is a neighbor of :math:`p`, compute the three angular values
// 将计算结果装入SPFH直方图
3. bin all the results in an output SPFH histogram
// 步骤二
2. pass 2:
// 获取p的邻域点
1. get the nearest neighbors of :math:`p`
// 使用上一步计算的SPFH作为权重加和得到FPFH
3. use each SPFH of :math:`p` with a weighting scheme to assemble the FPFH of :math:`p`:
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
拓展:有时我们考虑到效率问题,选择不检查法线是否包含NaN或infinite值。将这些值传递给compute(),但是这将导致未知输出。建议至少在参数设置和程序编写时,增加检查正常值的步骤。这可以通过在调用compute()之前插入以下代码来实现:
for (int i = 0; i < normals->size(); i++)
{
if (!pcl::isFinite<pcl::Normal>((*normals)[i]))
{
PCL_WARN("normals[%d] is not finite\n", i);
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
在代码编写中,应该设置预处理步骤和参数,使法线是有限的否则将引发错误。若需要进一步增加效率可以在多核处理器的计算机内使用OpenMP多线程计算,具体为使用pcl::FPFHEstimationOMP 替代pcl::FPFHEstimation指令,使用方法一致。
总结:
本篇文章介绍了什么是FPFH点特征直方图及与PFH的区别,并通过示例程序分析了如何使用Feature模块中快速点特征直方图计算的流程。下一篇文章将进一步介绍视点特征直方图(VFH)的原理和使用。
【博主简介】
斯坦福的兔子,男,95,天津大学机械工程工学硕士。21年毕业至今从事光学三维成像及点云处理相关工作。因工作中使用的三维处理库为公司内部库,不具有普遍适用性,遂自学开源PCL库及其相关数学知识以备使用。谨此将自学过程与君共享。
博主才疏学浅,尚不具有指导能力,如有问题还请各位在评论处留言供大家共同讨论。
若前辈们有工作机会介绍欢迎私信。
评论记录:
回复评论: