
参考引用
1. 引言
-
关键点也称为兴趣点,它是 2D 图像或 3D 点云或曲面模型上,可以通过检测标准来获取的具有稳定性、区别性的点集。从技术上来说,关键点的数量比原始点云或图像的数据量少很多,其与局部特征描述子结合组成关键点描述子。常用来构成原始数据的紧凑表示,具有代表性与描述性,从而加快后续识别、追踪等对数据的处理速度
-
NARF(Normal Aligned Radial Feature)关键点是为了从深度图像中识别物体而提出的,关键点检测的重要一步是减少特征提取时的搜索空间,把重点放在重要的结构上,对 NARF 关键点提取过程有以下要求
- 提取的过程必须考虑边缘以及物体表面变化信息
- 即使换了不同的视角,关键点的位置必须稳定的可以被重复检测
- 关键点所在的位置必须有稳定的支持区域,可以计算描述子和估计唯一的法向量
-
为了满足上述要求,可以通过以下检测步骤来进行关键点提取
- 1、遍历每个深度图像点,通过寻找在近邻区域有深度突变的位置进行边缘检测
- 2、遍历每个深度图像点,根据近邻区域的表面变化决定一测度表面变化的系数,以及变化的主方向
- 3、根据第 2 步找到的主方向计算兴趣值,表征该方向与其他方向的不同,以及该处表面的变化情况,即该点有多稳定
- 4、对兴趣值进行平滑过滤
- 5、进行无最大值压缩找到最终的关键点,即为 NARF 关键点
2. 代码实现
- narf_keypoint_extraction.cpp
#include \n\n"
<< "Options:\n"
<< "-------------------------------------------\n"
<< "-r angular resolution in degrees (default " << angular_resolution << ")\n" // 指定角度分辨率的浮点数值,默认值为 angular_resolution
<< "-c coordinate frame (default " << (int) coordinate_frame << ")\n" // 指定坐标系的整数值,默认值为 coordinate_frame
<< "-m Treat all unseen points as maximum range readings\n" // 将所有未被观察到的点视为最大距离处理
<< "-s support size for the interest points (diameter of the used sphere - "
<< "default " << support_size << ")\n"
<< "-h this help\n" // 输出帮助信息
<< "\n\n";
}
/*
void setViewerPose (pcl::visualization::PCLVisualizer& viewer, const Eigen::Affine3f& viewer_pose) {
Eigen::Vector3f pos_vector = viewer_pose * Eigen::Vector3f (0, 0, 0);
Eigen::Vector3f look_at_vector = viewer_pose.rotation () * Eigen::Vector3f (0, 0, 1) + pos_vector;
Eigen::Vector3f up_vector = viewer_pose.rotation () * Eigen::Vector3f (0, -1, 0);
viewer.setCameraPosition (pos_vector[0], pos_vector[1], pos_vector[2],
look_at_vector[0], look_at_vector[1], look_at_vector[2],
up_vector[0], up_vector[1], up_vector[2]);
}
*/
int main(int argc, char **argv) {
// 解析命令行参数(执行时在 ./range_image_border_extraction.cpp 后添加)
if (pcl::console::find_argument(argc, argv, "-h") >= 0) {
printUsage(argv[0]);
return 0;
}
if (pcl::console::find_argument(argc, argv, "-m") >= 0) {
setUnseenToMaxRange = true;
cout << "Setting unseen values in range image to maximum range readings.\n";
}
int tmp_coordinate_frame;
if (pcl::console::parse(argc, argv, "-c", tmp_coordinate_frame) >= 0) {
coordinate_frame = pcl::RangeImage::CoordinateFrame(tmp_coordinate_frame);
cout << "Using coordinate frame " << (int) coordinate_frame << ".\n";
}
if (pcl::console::parse(argc, argv, "-s", support_size) >= 0)
cout << "Setting support size to " << support_size << ".\n";
if (pcl::console::parse(argc, argv, "-r", angular_resolution) >= 0)
cout << "Setting angular resolution to " << angular_resolution << "deg.\n";
// 将一个以度为单位表示的 角度分辨率值 转换为弧度制的值
angular_resolution = pcl::deg2rad(angular_resolution);
// 读取点云 PCD 文件;如果没有输入 PCD 文件就生成一个点云
pcl::PointCloud<PointType>::Ptr point_cloud_ptr(new pcl::PointCloud<PointType>);
pcl::PointCloud<PointType> &point_cloud = *point_cloud_ptr;
pcl::PointCloud<pcl::PointWithViewpoint> far_ranges; // 定义点云中每个点的位置和视角信息
Eigen::Affine3f scene_sensor_pose(Eigen::Affine3f::Identity ()); // 申明传感器的位置是一个 4*4 的仿射变换
// 解析命令行参数,并返回所有 .pcd 扩展名的文件的索引列表
std::vector<int> pcd_filename_indices = pcl::console::parse_file_extension_argument(argc, argv, "pcd");
if (!pcd_filename_indices.empty()) {
std::string filename = argv[pcd_filename_indices[0]]; // 保存从命令行参数获取到的第一个 PCD 文件名
if (pcl::io::loadPCDFile(filename, point_cloud) == -1) {
cerr << "Was not able to open file \"" << filename << "\".\n";
printUsage(argv[0]);
return 0;
}
// 给传感器的位姿赋值,就是获取点云的传感器的 平移与旋转的向量
// scene_sensor_pose:相机在场景中的位姿(位置和朝向)
// Eigen::Affine3f:可以表示平移、旋转等多种变换,并且支持矩阵乘法来组合多个变换
scene_sensor_pose = Eigen::Affine3f(Eigen::Translation3f(point_cloud.sensor_origin_[0],
point_cloud.sensor_origin_[1],
point_cloud.sensor_origin_[2])) *
Eigen::Affine3f(point_cloud.sensor_orientation_);
// 去除文件扩展名,并添加 "_far_ranges.pcd" 来创建输出文件名
std::string far_ranges_filename = pcl::getFilenameWithoutExtension(filename) + "_far_ranges.pcd";
if (pcl::io::loadPCDFile(far_ranges_filename.c_str(), far_ranges) == -1)
std::cout << "Far ranges file \"" << far_ranges_filename << "\" does not exists.\n";
} else { // 如果没有读取点云,则要自己生成点云
setUnseenToMaxRange = true;
cout << "\nNo *.pcd file given => Generating example point cloud.\n\n";
for (float x = -0.5f; x <= 0.5f; x += 0.01f) {
for (float y = -0.5f; y <= 0.5f; y += 0.01f) {
PointType point;
point.x = x;
point.y = y;
point.z = 2.0f - y;
point_cloud.points.push_back(point);
}
}
point_cloud.width = (int) point_cloud.points.size();
point_cloud.height = 1;
}
// 从创建的原始点云中获取深度图
float noise_level = 0.0;
float min_range = 0.0f;
int border_size = 1;
// 使用智能指针 boost::shared_ptr 管理内存,确保在不需要该对象时自动释放其占用的空间
boost::shared_ptr<pcl::RangeImage> range_image_ptr(new pcl::RangeImage);
pcl::RangeImage &range_image = *range_image_ptr;
range_image.createFromPointCloud(point_cloud, angular_resolution,
pcl::deg2rad(360.0f), pcl::deg2rad(180.0f),
scene_sensor_pose, coordinate_frame, noise_level, min_range, border_size);
range_image.integrateFarRanges(far_ranges); // 将远处的距离数据合并到深度图像中对应的位置上,以提高远处物体的检测效果
// 将所有未被观测到的点的值设置为距离图像中已知距离的最大值
// 避免在后续的处理或分析过程中出现未知的距离值所带来的问题
if (setUnseenToMaxRange)
range_image.setUnseenToMaxRange();
// 设置点云可视化
pcl::visualization::PCLVisualizer viewer("3D Viewer");
viewer.setBackgroundColor(1, 1, 1);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointWithRange> range_image_color_handler(range_image_ptr,
255, 0, 0);
viewer.addPointCloud(range_image_ptr, range_image_color_handler, "range image");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 2, "range image");
viewer.addCoordinateSystem (1.0f, "global");
//PointCloudColorHandlerCustom point_cloud_color_handler (point_cloud_ptr, 150, 150, 150);
//viewer.addPointCloud (point_cloud_ptr, point_cloud_color_handler, "original point cloud");
viewer.initCameraParameters();
//setViewerPose (viewer, range_image.getTransformationToWorldSystem ());
// 显示深度图像
pcl::visualization::RangeImageVisualizer range_image_widget("Range image");
range_image_widget.showRangeImage(range_image);
// 提取 NARF 关键点
pcl::RangeImageBorderExtractor range_image_border_extractor; // 创建对象,用于提取点云数据的边界
// 使用上行对象提取的边界信息进行 NARF 关键点检测
pcl::NarfKeypoint narf_keypoint_detector(&range_image_border_extractor);
narf_keypoint_detector.setRangeImage(&range_image); // 设置要用于关键点检测的 RangeImage 对象
// support_size 是一个变量,其值被用于设置支持半径的大小参数
narf_keypoint_detector.getParameters().support_size = support_size;
//narf_keypoint_detector.getParameters ().add_points_on_straight_edges = true;
//narf_keypoint_detector.getParameters ().distance_for_additional_points = 0.5;
pcl::PointCloud<int> keypoint_indices; // 用于存储关键点的索引
narf_keypoint_detector.compute(keypoint_indices); // 关键点检测计算
std::cout << "Found " << keypoint_indices.points.size() << " key points.\n";
// -----Show keypoints in range image widget-----
//for (size_t i=0; i
//range_image_widget.markPoint (keypoint_indices.points[i]%range_image.width,
//keypoint_indices.points[i]/range_image.width);
// 提取出的关键点可视化
pcl::PointCloud<pcl::PointXYZ>::Ptr keypoints_ptr(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ> &keypoints = *keypoints_ptr;
// 调整 keypoints 对象中的点数以与索引点数相同,以存储从 range_image 中提取的关键点
keypoints.points.resize(keypoint_indices.points.size());
// 对于每个索引点,代码将在 range_image 中找到相应的点,并将其复制到 keypoints 数据集中
// getVector3fMap() 方法用于获取三维向量的映射,并将其设置为新点的位置
for (size_t i = 0; i < keypoint_indices.points.size(); ++i) {
keypoints.points[i].getVector3fMap() = range_image.points[keypoint_indices.points[i]].getVector3fMap();
}
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> keypoints_color_handler(keypoints_ptr, 0, 255, 0);
viewer.addPointCloud<pcl::PointXYZ>(keypoints_ptr, keypoints_color_handler, "keypoints");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 5, "keypoints");
while (!viewer.wasStopped()) {
range_image_widget.spinOnce(); // process GUI events
viewer.spinOnce();
pcl_sleep(0.01);
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
-
配置文件 CMakeLists.txt
cmake_minimum_required(VERSION 3.5 FATAL_ERROR) project(narf_keypoint_extraction) find_package(PCL 1.3 REQUIRED) include_directories(${PCL_INCLUDE_DIRS}) link_directories(${PCL_LIBRARY_DIRS}) add_definitions(${PCL_DEFINITIONS}) add_executable (narf_keypoint_extraction narf_keypoint_extraction.cpp) target_link_libraries (narf_keypoint_extraction ${PCL_LIBRARIES})- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
-
编译并执行
$ mkdir build $ cd build $ cmake .. $ make $ ./narf_keypoint_extraction -m ../table_scene_lms400.pcd- 1
- 2
- 3
- 4
- 5
- 6
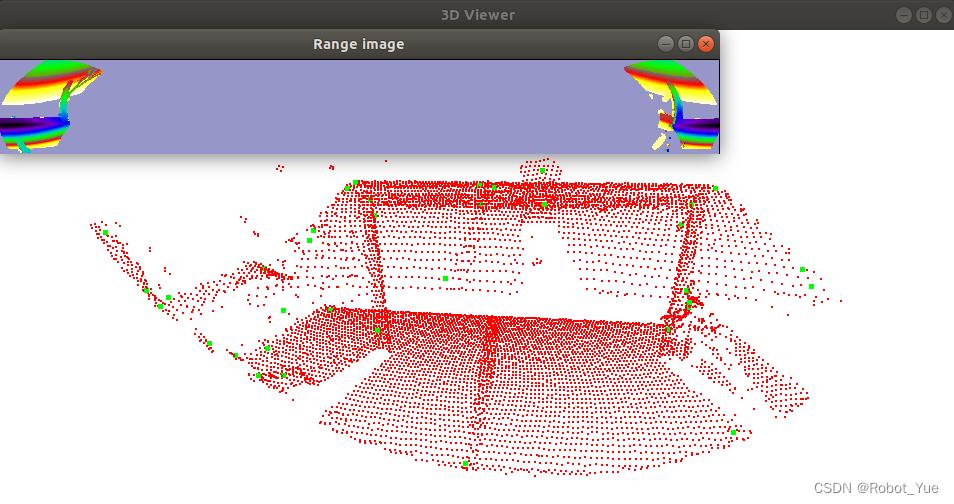
# 输出结果(见下图,绿色的点为提取的关键点) Found 37 key points.- 1
- 2
-
项目名称:OmniParser
项目地址url:https://github.com/microsoft/OmniParser
项目语言:Jupyter Notebook
历史star数:8971
今日star数:969
项目维护者:yadong-lu, ThomasDh-C, aliencaocao, nmstoker, krishna2
项目简介:一个面向纯视觉基础GUI代理的简单屏幕解析工具 -
项目名称:MoneyPrinterV2
项目地址url:https://github.com/FujiwaraChoki/MoneyPrinterV2
项目语言:Python
历史star数:8207
今日star数:984
项目维护者:FujiwaraChoki, supperfreddo, TomyDiNero, SUTFutureCoder, Xeno852
项目简介:自动化在线赚钱的过程 -
项目名称:markitdown
项目地址url:https://github.com/microsoft/markitdown
项目语言:HTML
历史star数:37712
今日star数:87
项目维护者:gagb, afourney, sugatoray, PetrAPConsulting, l-lumin
项目简介:将文件和办公文档转换为Markdown的Python工具 -
项目名称:scira
项目地址url:https://github.com/zaidmukaddam/scira
项目语言:TypeScript
历史star数:5958
今日star数:370
项目维护者:zaidmukaddam, simplr-sh, impoiler, waleedlatif1, ericdachen
项目简介:Scira(前身为MiniPerplx)是一个极简主义的人工智能搜索引擎,帮助您在网上找到信息。由Vercel AI SDK支持!使用如Grok 2.0等模型进行搜索。 -
项目名称:build-your-own-x
项目地址url:https://github.com/codecrafters-io/build-your-own-x
项目语言:Markdown
历史star数:335674
今日star数:650
项目维护者:danistefanovic, rohitpaulk, sarupbanskota, fake-rookie, bauripalash
项目简介:通过从零开始重新创建您最喜欢的技术来掌握编程 -
项目名称:unstract
项目地址url:https://github.com/Zipstack/unstract
项目语言:Python
历史star数:4165
今日star数:175
项目维护者:chandrasekharan-zipstack, nehabagdia, Deepak-Kesavan, muhammad-ali-e, tahierhussain
项目简介:无需编码的LLM平台,用于启动API和ETL管道以结构化非结构化文档 -
项目名称:union
项目地址url:https://github.com/unionlabs/union
项目语言:Rust
历史star数:26025
今日star数:1714
项目维护者:cor, hussein-aitlahcen, benluelo, o-az, PoisonPhang
项目简介:为去中心化金融设计的信任最小化、零知识桥接协议,具有抗审查性、极高安全性 -
项目名称:Stirling-PDF
项目地址url:https://github.com/Stirling-Tools/Stirling-PDF
项目语言:Java
历史star数:50791
今日star数:122
项目维护者:Frooodle, Ludy87, apps/github-actions, apps/dependabot, sbplat
项目简介:#1 本地托管的Web应用程序,允许您对PDF文件执行各种操作 -
项目名称:rustowl
项目地址url:https://github.com/cordx56/rustowl
项目语言:Rust
历史star数:1941
今日star数:269
项目维护者:cordx56, wx257osn2, mawkler, Jayllyz, mu001999
项目简介:可视化Rust中的所有权和生命周期 -
项目名称:swift-composable-architecture
项目地址url:https://github.com/pointfreeco/swift-composable-architecture
项目语言:Swift
历史star数:12908
今日star数:56
项目维护者:stephencelis, mbrandonw, tgrapperon, iampatbrown, Jager-yoo
项目简介:一个库,旨在以一致且易于理解的方式构建应用,注重组合性、测试性和易用性 -
项目名称:yt-dlp
项目地址url:https://github.com/yt-dlp/yt-dlp
项目语言:Python
历史star数:100634
今日star数:95
项目维护者:dstftw, phihag, pukkandan, remitamine, jaimeMF
项目简介:一个功能丰富的命令行音频/视频下载器 -
项目名称:GitHubDaily
项目地址url:https://github.com/GitHubDaily/GitHubDaily
项目语言:无
历史star数:34927
今日star数:200
项目维护者:YSoer, Freelander, Azleal, ElegantNorlin
项目简介:坚持分享GitHub上高质量、有趣实用的开源技术教程、开发者工具、编程网站和技术资讯。一份酷炫有趣的GitHub项目清单。 -
项目名称:GenAI-Showcase
项目地址url:https://github.com/mongodb-developer/GenAI-Showcase
项目语言:Jupyter Notebook
历史star数:1406
今日star数:173
项目维护者:RichmondAlake, Pash10g, ajosh0504, anaiyaraisin, snarvaez
项目简介:GenAI Cookbook -
项目名称:awesome-llm-apps
项目地址url:https://github.com/Shubhamsaboo/awesome-llm-apps
项目语言:Python
历史star数:16331
今日star数:156
项目维护者:Shubhamsaboo, Madhuvod, gargigupta97, Vadiml1024, CodeWithCharan
项目简介:收集了使用OpenAI、Anthropic、Gemini和开源模型实现的优秀LLM应用,包括AI代理和RAG -
项目名称:awesome-cto
项目地址url:https://github.com/kuchin/awesome-cto
项目语言:无
历史star数:28747
今日star数:70
项目维护者:kuchin, darigovresearch, maximveksler, MohamedBsh, neiled
项目简介:一个精选且有观点的资源列表,专为首席技术官设计,特别强调初创公司

评论记录:
回复评论: