
目录
PCA9685接线:
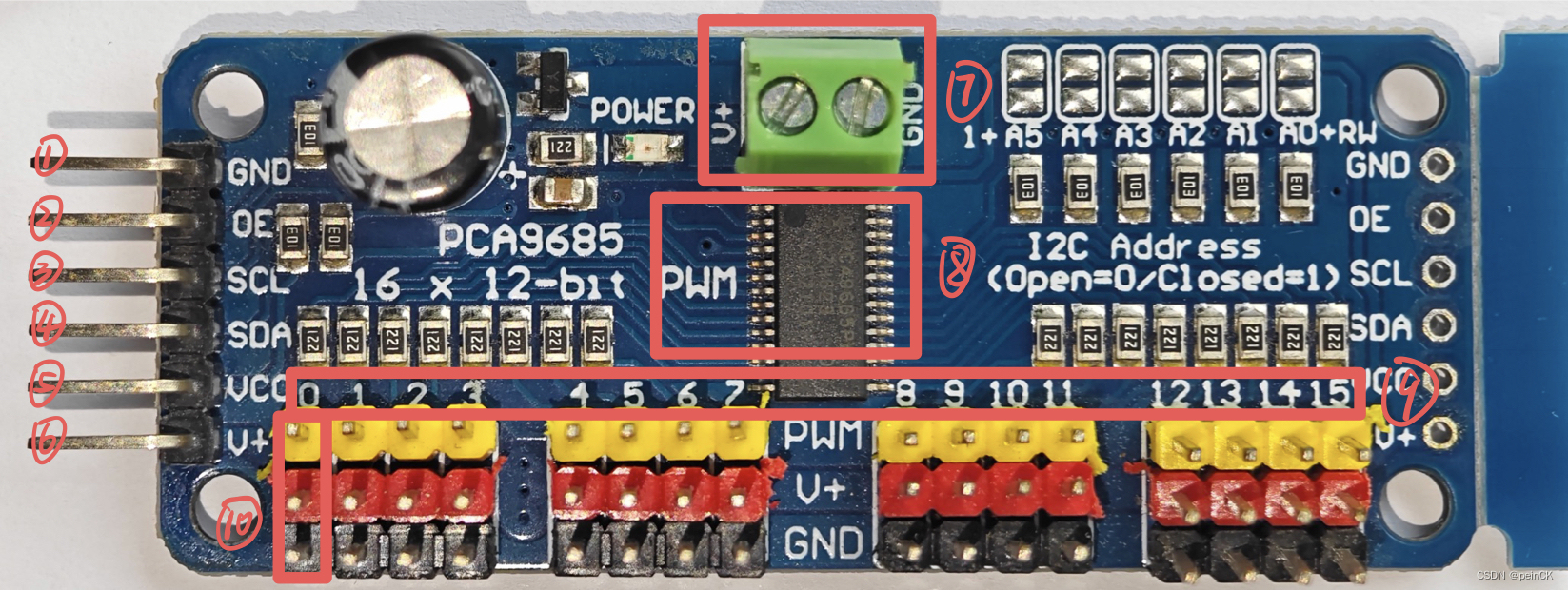
| 序号 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 指代 | GND | OE(模块使能端口) | SCL | SDA | VCC | V+ | 电源输入端口 | PCA9685 | pwm通道编号 | 舵机接口 |
OE使能端口:低电平使能,内部已经拉低,可以不用接线。
SCL和SDA端口:IIC接口。
V+端口:如果使用少量舵机(两三个舵机),可以通过V+接入电源。(Max电压:6V)
电源输入端口:如果使用多个舵机(五六个舵机),或者大扭矩舵机,最好使用电源输入端口单独
供电不要使用V+端口供电。(Max电压:6V)
PCA9685简介:
PCA9685 是一种常用的 PWM(脉冲宽度调制)驱动器芯片,通常用于控制舵机、电机和其他需要精确控制的设备。该芯片可以通过 I2C 总线与微控制器或单片机通信,以实现对多路 PWM 信号的生成和控制。
16 路 PWM 输出:PCA9685 可以同时控制最多 16 路 PWM 输出,每路输出的占空比都可以独立设置,但是16路PWM频率一样。
12 位分辨率:PCA9685 提供了 12 位分辨率的 PWM 输出,可以实现精细的输出控制。
内部振荡器:芯片内部集成了振荡器,可以产生稳定25MHz的时钟信号,无需外部晶振。
可编程频率:可以通过配置寄存器来设置 PWM 输出的频率,范围从 24 Hz 到 1526 Hz。
I2C 接口:使用标准的 I2C 串行总线接口与主控设备通信,方便集成到各种微控制器系统中。
输出驱动能力:每路 PWM 输出都具有较强的驱动能力,可以直接驱动舵机或者其他负载。
PCA9685地址位寄存器:
地址位的寄存器一共8位,通过地址寄存器来设置芯片的I2C地址。
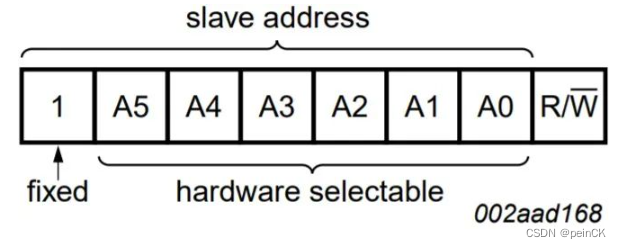
| 位7 | 位6 | 位5 | 位4 | 位3 | 位2 | 位1 | 位0 |
| 1 | A5 | A4 | A3 | A2 | A1 | A0 | R/W |
| 固定值 “ 1 ” | 可定义 | 可定义 | 可定义 | 可定义 | 可定义 | 可定义 | 读/写控制 |
往PCA9685写程序的时候,发送的地址位是0x80,bit[7~0]:1000 0000 位0置“ 0 ” 表示写入;
读程序的时候,发送的地址位是0x81,bit[7~0]:1000 0001 位0置“ 1 ” 表示读取;
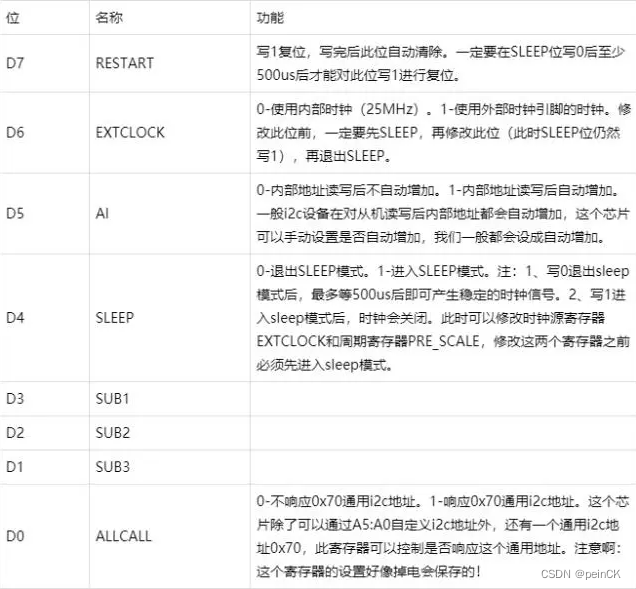
MODE1寄存器,地址0x00,可读、可写:
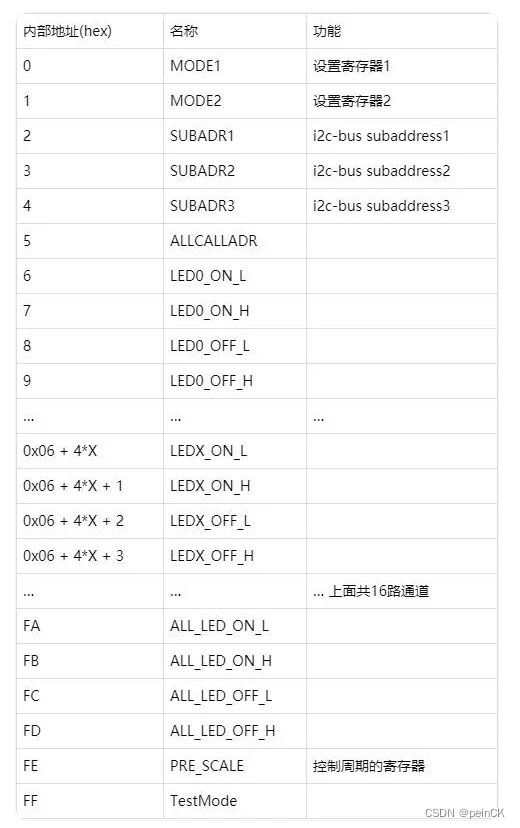
寄存器地址:
照片引用地址:PCA9685--16路 PWM模块舵机驱动板--STM32 IIC接口模块 (baidu.com)
PCA9685代码注解:
1.PCA9685数据写入:
- void PCA9685_Write(u8 addr,u8 data) // addr 表示要写入数据的寄存器地址,data 表示要写入的数据
- {
- IIC_Start(); // 发送 I2C 起始信号,开始 I2C 通信。
-
- IIC_Send_Byte(PCA_Addr); // 发送 PCA_Addr = 0x80 ,告诉设备我们要写入数据
- IIC_NAck(); // 发送不应答信号,表示主控器不需要从设备接收更多数据。
-
- IIC_Send_Byte(addr); // 发送要写入数据的寄存器地址。
- IIC_NAck(); // 发送不应答信号。
-
- IIC_Send_Byte(data); // 发送要写入的数据。
- IIC_NAck(); // 发送不应答信号。
-
- IIC_Stop(); // 发送 I2C 停止信号,结束本次通信。
-
- }

2.PCA9685数据读取:
- u8 PCA9685_Read(u8 addr) // addr 表示要读取数据的寄存器地址
- {
- u8 data; // 声明一个无符号 8 位整数变量 data,用于存储读取到的数据。
-
- IIC_Start(); // 发送 I2C 起始信号,开始 I2C 通信。
-
- IIC_Send_Byte(PCA_Addr); // 发送 PCA_Addr = 0x80 ,告诉设备我们要写入数据
-
- IIC_NAck(); // 发送不应答信号,表示主控器不需要从设备接收更多数据。
-
- IIC_Send_Byte(addr); // 发送要读取数据的寄存器地址。
- IIC_NAck(); // 发送不应答信号。
-
- IIC_Stop(); // 发送 I2C 停止信号,结束本次通信。
-
- delay_us(10); // 延时 10 微秒,等待芯片准备好数据。
-
-
- IIC_Start(); // 发送 I2C 起始信号,开始另一次 I2C 通信。
-
- IIC_Send_Byte(PCA_Addr|0x01); // 发送 PCA9685 的地址,并设置最低位为 1,
- // PCA_Addr|0x01 = 0x81 表示要进行读取操作。
-
- IIC_NAck(); // 发送不应答信号。
-
- data = IIC_Read_Byte(0); // 通过 I2C 从 PCA9685 读取一个字节的数据,并存储到变量 data 中。
-
- IIC_Stop(); // 发送 I2C 停止信号,结束本次通信。
-
- return data; // 返回读取到的数据。
-
- }
3.PCA9685的频率设置:
- void PCA9685_setFreq(float freq)
- {
- u8 prescale,oldmode,newmode; //定义了三个无符号 8 位整型变量 用于存储预分频器值、旧的模式寄存器值和新的模式寄存器值
-
- double prescaleval; //定义了一个双精度浮点型变量 prescaleval,用于计算预分频器的值。
-
- freq *= 0.98; //将传入的频率值乘以 0.98,这是为了微调频率值以适应 PCA9685 的实际需求
- prescaleval = 25000000; //这是 PCA9685 内部振荡器的频率
- prescaleval /= 4096; //每个周期从0计数到4095,除以 4096,得到每个计数器周期的时间,
- prescaleval /= freq; //除以所需的频率值,得到预分频器的值。
- prescaleval -= 1; //减去 1,得到最终的预分频器值
- prescale = floor(prescaleval+0.5f); //将计算得到的预分频器值四舍五入取整,并将其赋值给 prescale 变量。
- oldmode = PCA9685_Read(PCA_Model); //通过调用 PCA9685_Read 函数读取当前 PCA9685 寄存器中的模式值,并将其存储在 oldmode 变量中。
-
- newmode = (oldmode&0x7F)|0x10; //根据旧的模式值计算出新的模式值,将最高位清零(bit 7)并将第 5 位设为1(bit 4),表示将 PCA9685 设置为睡眠模式。
- PCA9685_Write(PCA_Model,newmode); //将新的模式值写入 PCA9685 的模式寄存器。
- PCA9685_Write(PCA_Pre,prescale); //将计算得到的预分频器值写入 PCA9685 的预分频器寄存器。
- PCA9685_Write(PCA_Model,oldmode); //恢复旧的模式值。
- delay_ms(5); // 延时 5 毫秒,等待 PCA9685 完全启动。
- PCA9685_Write(PCA_Model,oldmode|0xa1); //将模式值的最高位和第 1 位设为1,表示将 PCA9685 设置为正常工作模式。
-
- }

理论计算(预分配值):prescaleval = ( 25000000 / 4096 / 50 )- 1 = 121 .0703125
实际计算(预分配值):prescaleval = ( 25000000 / 4096 / 50 *0.98)- 1 = 118.62890625
- double prescaleval; //定义了一个双精度浮点型变量 prescaleval,用于计算预分频器的值。
-
- freq *= 0.98; //将传入的频率值乘以 0.98,这是为了微调频率值以适应 PCA9685 的实际需求
- prescaleval = 25000000; //这是 PCA9685 内部振荡器的频率
- prescaleval /= 4096; //每个周期从0计数到4095,除以 4096,得到每个计数器周期的时间,
- prescaleval /= freq; //除以所需的频率值,得到预分频器的值。
- prescaleval -= 1; //减去 1,得到最终的预分频器值
内部振荡器的精度限制,设置预分频器值时无法完全达到所需的输出频率,将传入的频率值freq 乘以0.98,是为了微调频率值,以弥补 PCA9685 内部振荡器的偏差,使最终输出的频率更接近预期值。(0.98是经验值,实际使用中可自行调整)
freq *= 0.98; //将传入的频率值乘以 0.98,这是为了微调频率值以适应 PCA9685 的实际需求对预分频值prescaleval,进行四舍五入。
例如prescaleval=118.3,则 prescale = floor(prescaleval+0.5f); = floor(118.3+0.5)=118
prescaleval=118.8,则 prescale = floor(prescaleval+0.5f); = floor(118.8+0.5)=119
prescaleval+0.5f 是为了模拟四舍五入的效果
floor () 函数对浮点数进行向下取整操作,返回不大于该浮点数的最大整数部分。
prescale = floor(prescaleval+0.5f); //将计算得到的预分频器值四舍五入取整,并将其赋值给 prescale 变量。- oldmode = PCA9685_Read(PCA_Model); //通过调用 PCA9685_Read 函数读取当前 PCA9685 寄存器中的模式值,并将其存储在 oldmode 变量中。
-
- newmode = (oldmode&0x7F)|0x10; //根据旧的模式值计算出新的模式值,将最高位清零(bit 7)并将第 5 位设为1(bit 4),表示将 PCA9685 设置为睡眠模式。
- PCA9685_Write(PCA_Model,newmode); //将新的模式值写入 PCA9685 的模式寄存器。
- PCA9685_Write(PCA_Pre,prescale); //将计算得到的预分频器值写入 PCA9685 的预分频器寄存器。PCA_Pre = 0xFE
-
- PCA9685_Write(PCA_Model,oldmode); //恢复旧的模式值。
- delay_ms(5); // 延时 5 毫秒,等待 PCA9685 完全启动。
- PCA9685_Write(PCA_Model,oldmode|0xa1); //将模式值的最高位和第 1 位设为1,表示将 PCA9685 设置为正常工作模式。


4.PCA9685的PWM设置:
- void PCA9685_setPWM(u8 num,u32 on,u32 off) //num 表示 PWM 通道号,on 表示 PWM 的起始位置,off 表示 PWM 的结束位置(即从高电平切换到低电平的时刻)
- {
- IIC_Start(); //发送 I2C 起始信号,开始 I2C 通信。
-
- IIC_Send_Byte(PCA_Addr); //发送 PCA9685 的地址,告诉设备我们要和 PCA9685 进行通信。
- IIC_Wait_Ack(); //等待应答信号,确保设备准备好接收数据。
-
- IIC_Send_Byte(LED0_ON_L+4*num); //发送 LED 寄存器的地址,根据 PWM 通道号计算出相应的寄存器地址。
- IIC_Wait_Ack(); //
-
- IIC_Send_Byte(on&0xFF); //发送 PWM 的起始位置低 8 位。
- IIC_Wait_Ack(); //等待应答信号。
-
- IIC_Send_Byte(on>>8); //发送 PWM 的起始位置高 8 位。
- IIC_Wait_Ack(); //等待应答信号。
-
- IIC_Send_Byte(off&0xFF); //发送 PWM 的结束位置低 8 位。
- IIC_Wait_Ack(); //等待应答信号。
-
- IIC_Send_Byte(off>>8); //发送 PWM 的结束位置高 8 位。
- IIC_Wait_Ack(); //等待应答信号。
-
- IIC_Stop(); //发送 I2C 停止信号,结束本次通信。
-
- }
void PCA9685_setPWM(u8 num,u32 on,u32 off)函数传入:通道编号“ num”、“ on ”的值,“ off ”的值
当PCA9685的12位计数ACK,与“ on ”值进行比较,等于“ on ”值输出高电平
与“ off ”值进行比较,等于“ off ”值输出低电平
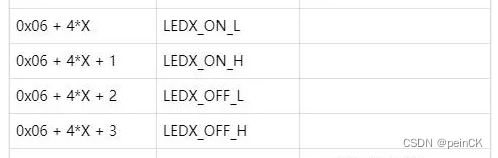
每路 PWM 有 4 个 8 位控制寄存器, LEDX_ON_L、LEDX_ON_H、LEDX_OFF_L、LEDX_OFF_H 四个寄存器。
通道0的LED0_ON_L:0x06,LED0_ON_H:0x07,LED0_OFF_L:0x08,LED0_OFF:0x09
所以输出通道的起始地址为:0x06+4*X (X为通道号)
舵机转动角度置换:
可以先了解一下:舵机驱动原理
PCA9685,每个周期都是从0计数到4095;设置 “ on ” = 0 , “ off ” = ?
| 脉冲宽度 | on | off |
| 0.5ms | 0 | 0.5/20*4096=102.4 |
| 1.5ms | 0 | 1.5/20*4096=307.2 |
| 2.5ms | 0 | 2.5/20*4096=512 |
取0.5ms时,off=102 ; 2.5ms时,off=512
| 舵机类型 | 每转动“ 1 ”度,计数个数 |
| 90 | 410/90 = 4.56 |
| 180 | 410/180 = 2.28 |
| 270 | 410/270 = 1.52 |
| 360 | 410/270 = 1.14 |
个人觉得转化为角度,驱动舵机转动偏差较大,所以直接输入“ off ”值控制舵机转动就好;
因为PCA9685精准度有限,所以理论计算出的的数值与实际存在一定偏差。
所以void setAngle(u8 num,u16 angle)函数和void PCA9685_Init(float hz,u16 angle)函数
根据个人意愿修改参数。
- void setAngle(u8 num,u16 angle)
- {
- u32 off = 0;
- off = (u32)(103+angle*1.13); //360度舵机,每转动一度=1.14 0.5ms -180度起始位置:103
- PCA9685_setPWM(num,0,angle);
- }
-
-
-
-
- void PCA9685_Init(float hz,u16 angle)
- {
- u32 off = 0;
- IIC_Init();
- PCA9685_Write(PCA_Model,0x00);
- PCA9685_setFreq(hz);
- off = (u32)(103+angle*1.14); //360度舵机,每转动一度=1.14 0.5ms -180度起始位置:103
- PCA9685_setPWM(0,0,off);
- PCA9685_setPWM(1,0,off);
- PCA9685_setPWM(2,0,off);
- PCA9685_setPWM(3,0,off);
- PCA9685_setPWM(4,0,off);
- PCA9685_setPWM(5,0,off);
- PCA9685_setPWM(6,0,off);
- PCA9685_setPWM(7,0,off);
- PCA9685_setPWM(8,0,off);
- PCA9685_setPWM(9,0,off);
- PCA9685_setPWM(10,0,off);
- PCA9685_setPWM(11,0,off);
- PCA9685_setPWM(12,0,off);
- PCA9685_setPWM(13,0,off);
- PCA9685_setPWM(14,0,off);
- PCA9685_setPWM(15,0,off);
- delay_ms(100);
-
- }
PCA9685驱动代码:
main.c程序:
- #include "sys.h"
- #include "delay.h"
- #include "myiic.h"
- #include "PCA9685.h"
- int main(void)
- {
- delay_init(168); //初始化延时函数
- PCA9685_Init(50,360);
-
-
- while(1)
- {
- setAngle(4,210); // 输入pwm通道号、舵机转动角度
- delay_ms(500); //添加延时,确定舵机运动到指定位置
- setAngle(4,120); // 输入pwm通道号、舵机转动角度
- delay_ms(500); //添加延时,确定舵机运动到指定位置
- }
IIC驱动:(正点原子IIC实验代码)
IIC.c文件
- #include "myiic.h"
- #include "delay.h"
-
- //初始化IIC
- void IIC_Init(void)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
-
- RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);//使能GPIOB时钟
-
- //GPIOB8,B9初始化设置
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_9;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//普通输出模式
- GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
- GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
- GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化
- IIC_SCL=1;
- IIC_SDA=1;
- }
- //产生IIC起始信号
- void IIC_Start(void)
- {
- SDA_OUT(); //sda线输出
- IIC_SDA=1;
- IIC_SCL=1;
- delay_us(4);
- IIC_SDA=0;//START:when CLK is high,DATA change form high to low
- delay_us(4);
- IIC_SCL=0;//钳住I2C总线,准备发送或接收数据
- }
- //产生IIC停止信号
- void IIC_Stop(void)
- {
- SDA_OUT();//sda线输出
- IIC_SCL=0;
- IIC_SDA=0;//STOP:when CLK is high DATA change form low to high
- delay_us(4);
- IIC_SCL=1;
- IIC_SDA=1;//发送I2C总线结束信号
- delay_us(4);
- }
- //等待应答信号到来
- //返回值:1,接收应答失败
- // 0,接收应答成功
- u8 IIC_Wait_Ack(void)
- {
- u8 ucErrTime=0;
- SDA_IN(); //SDA设置为输入
- IIC_SDA=1;delay_us(1);
- IIC_SCL=1;delay_us(1);
- while(READ_SDA)
- {
- ucErrTime++;
- if(ucErrTime>250)
- {
- IIC_Stop();
- return 1;
- }
- }
- IIC_SCL=0;//时钟输出0
- return 0;
- }
- //产生ACK应答
- void IIC_Ack(void)
- {
- IIC_SCL=0;
- SDA_OUT();
- IIC_SDA=0;
- delay_us(2);
- IIC_SCL=1;
- delay_us(2);
- IIC_SCL=0;
- }
- //不产生ACK应答
- void IIC_NAck(void)
- {
- IIC_SCL=0;
- SDA_OUT();
- IIC_SDA=1;
- delay_us(2);
- IIC_SCL=1;
- delay_us(2);
- IIC_SCL=0;
- }
- //IIC发送一个字节
- //返回从机有无应答
- //1,有应答
- //0,无应答
- void IIC_Send_Byte(u8 txd)
- {
- u8 t;
- SDA_OUT();
- IIC_SCL=0;//拉低时钟开始数据传输
- for(t=0;t<8;t++)
- {
- IIC_SDA=(txd&0x80)>>7;
- txd<<=1;
- delay_us(2); //对TEA5767这三个延时都是必须的
- IIC_SCL=1;
- delay_us(2);
- IIC_SCL=0;
- delay_us(2);
- }
- }
- //读1个字节,ack=1时,发送ACK,ack=0,发送nACK
- u8 IIC_Read_Byte(unsigned char ack)
- {
- unsigned char i,receive=0;
- SDA_IN();//SDA设置为输入
- for(i=0;i<8;i++ )
- {
- IIC_SCL=0;
- delay_us(2);
- IIC_SCL=1;
- receive<<=1;
- if(READ_SDA)receive++;
- delay_us(1);
- }
- if (!ack)
- IIC_NAck();//发送nACK
- else
- IIC_Ack(); //发送ACK
- return receive;
- }
-
IIC.h文件
- #ifndef __MYIIC_H
- #define __MYIIC_H
- #include "sys.h"
-
-
- //IO方向设置
- #define SDA_IN() {GPIOB->MODER&=~(3<<(9*2));GPIOB->MODER|=0<<9*2;} //PB9输入模式
- #define SDA_OUT() {GPIOB->MODER&=~(3<<(9*2));GPIOB->MODER|=1<<9*2;} //PB9输出模式
- //IO操作函数
- #define IIC_SCL PBout(8) //SCL
- #define IIC_SDA PBout(9) //SDA
- #define READ_SDA PBin(9) //输入SDA
-
- //IIC所有操作函数
- void IIC_Init(void); //初始化IIC的IO口
- void IIC_Start(void); //发送IIC开始信号
- void IIC_Stop(void); //发送IIC停止信号
- void IIC_Send_Byte(u8 txd); //IIC发送一个字节
- u8 IIC_Read_Byte(unsigned char ack);//IIC读取一个字节
- u8 IIC_Wait_Ack(void); //IIC等待ACK信号
- void IIC_Ack(void); //IIC发送ACK信号
- void IIC_NAck(void); //IIC不发送ACK信号
-
- void IIC_Write_One_Byte(u8 daddr,u8 addr,u8 data);
- u8 IIC_Read_One_Byte(u8 daddr,u8 addr);
- #endif
PCA9685.c配置:
(代码引用于GItcode开源社区)
PCA9685模块使用(Arduino和STM32)_stm32_阿中廋不了-GitCode 开源社区 (csdn.net)
- #include "PCA9685.h"
- #include "myiic.h"
- #include "delay.h"
- #include
- #include "led.h"
- #include "usart.h"
-
- void PCA9685_Init(float hz,u16 angle)
- {
- u32 off = 0;
- IIC_Init();
- PCA9685_Write(PCA_Model,0x00);
- PCA9685_setFreq(hz);
- off = (u32)(103+angle*1.14); //360度舵机,每转动一度=1.14 0度起始位置:103
- PCA9685_setPWM(0,0,off);
- PCA9685_setPWM(1,0,off);
- PCA9685_setPWM(2,0,off);
- PCA9685_setPWM(3,0,off);
- PCA9685_setPWM(4,0,off);
- PCA9685_setPWM(5,0,off);
- PCA9685_setPWM(6,0,off);
- PCA9685_setPWM(7,0,off);
- PCA9685_setPWM(8,0,off);
- PCA9685_setPWM(9,0,off);
- PCA9685_setPWM(10,0,off);
- PCA9685_setPWM(11,0,off);
- PCA9685_setPWM(12,0,off);
- PCA9685_setPWM(13,0,off);
- PCA9685_setPWM(14,0,off);
- PCA9685_setPWM(15,0,off);
- delay_ms(100);
-
- }
-
- void PCA9685_Write(u8 addr,u8 data)
- {
- IIC_Start();
-
- IIC_Send_Byte(PCA_Addr);
- IIC_NAck();
-
- IIC_Send_Byte(addr);
- IIC_NAck();
-
- IIC_Send_Byte(data);
- IIC_NAck();
-
- IIC_Stop();
-
-
- }
-
- u8 PCA9685_Read(u8 addr)
- {
- u8 data;
-
- IIC_Start();
-
- IIC_Send_Byte(PCA_Addr);
- IIC_NAck();
-
- IIC_Send_Byte(addr);
- IIC_NAck();
-
- IIC_Stop();
-
- delay_us(10);
-
-
- IIC_Start();
-
- IIC_Send_Byte(PCA_Addr|0x01);
- IIC_NAck();
-
- data = IIC_Read_Byte(0);
-
- IIC_Stop();
-
- return data;
-
- }
-
- void PCA9685_setPWM(u8 num,u32 on,u32 off)
- {
- IIC_Start();
-
- IIC_Send_Byte(PCA_Addr);
- IIC_Wait_Ack();
-
- IIC_Send_Byte(LED0_ON_L+4*num);
- IIC_Wait_Ack();
-
- IIC_Send_Byte(on&0xFF);
- IIC_Wait_Ack();
-
- IIC_Send_Byte(on>>8);
- IIC_Wait_Ack();
-
- IIC_Send_Byte(off&0xFF);
- IIC_Wait_Ack();
-
- IIC_Send_Byte(off>>8);
- IIC_Wait_Ack();
-
- IIC_Stop();
-
- }
-
- void PCA9685_setFreq(float freq)
- {
- u8 prescale,oldmode,newmode;
-
- double prescaleval;
-
- freq *= 0.98;
- prescaleval = 25000000;
- prescaleval /= 4096;
- prescaleval /= freq;
- prescaleval -= 1;
- prescale = floor(prescaleval+0.5f);
- oldmode = PCA9685_Read(PCA_Model);
-
- newmode = (oldmode&0x7F)|0x10;
- PCA9685_Write(PCA_Model,newmode);
- PCA9685_Write(PCA_Pre,prescale);
- PCA9685_Write(PCA_Model,oldmode);
- delay_ms(5);
- PCA9685_Write(PCA_Model,oldmode|0xa1);
-
-
- }
-
- void setAngle(u8 num,u16 angle)
- {
- u32 off = 0;
- off = (u32)(103+angle*1.13); //360度舵机,每转动一度=1.14 0度起始位置:103
- PCA9685_setPWM(num,0,angle);
- }
-
-
-
PCA9685.h配置:
- #ifndef __PCA9685_H
- #define __PCA9685_H
- #include "sys.h"
- #define PCA_Addr 0x80
- #define PCA_Model 0x00
- #define LED0_ON_L 0x06
- #define LED0_ON_H 0x07
- #define LED0_OFF_L 0x08
- #define LED0_OFF_H 0x09
- #define PCA_Pre 0xFE
-
- void PCA9685_Init(float hz,u16 angle);
-
- void PCA9685_Write(u8 addr,u8 data);
-
- u8 PCA9685_Read(u8 addr);
-
- void PCA9685_setPWM(u8 num,u32 on,u32 off);
-
- void PCA9685_setFreq(float freq);
-
- void setAngle(u8 num,u16 angle);
- #endif
评论记录:
回复评论: