
本文是机甲大师机器人控制的系列博客之一。在软件架构设计的基础上,本文设计每个模块中的控制算法。
系列博客:
机甲大师机器人控制(一):概念与流程
机甲大师机器人控制(二):功能分析
机甲大师机器人控制(三):软件架构设计
机甲大师机器人控制(四):软件单元
机甲大师机器人控制(五):软件单元测试
机甲大师机器人控制(六):集成测试
机甲大师机器人控制(七):购买清单
1 开发阶段
软件单元阶段在软件架构设计阶段之后,同时会参照功能分析阶段中的策略,在Simulink模型的子系统中搭建控制模型。

另外说明一下,由于博主不是专业做控制策略的工程师,所以简化了该阶段的建模过程。在汽车软件开发中,闭环控制、滤波、诊断等技术都非常重要,但是都没有在这个DIY项目中体现出来。如果有做控制策略的同行,非常希望能够多多交流。
2 软件单元设计
本章会根据软件架构设计的内容,在每个子系统中进行细节上的建模,以实现功能分析阶段中提出的4个功能。
2.1 按键锁定模块
按键锁定模块是为了实现功能分析阶段中提出的第1条按键锁定功能,对应的子系统是顶层的使能子系统。该子系统在软件架构设计阶段就已经建立完成。
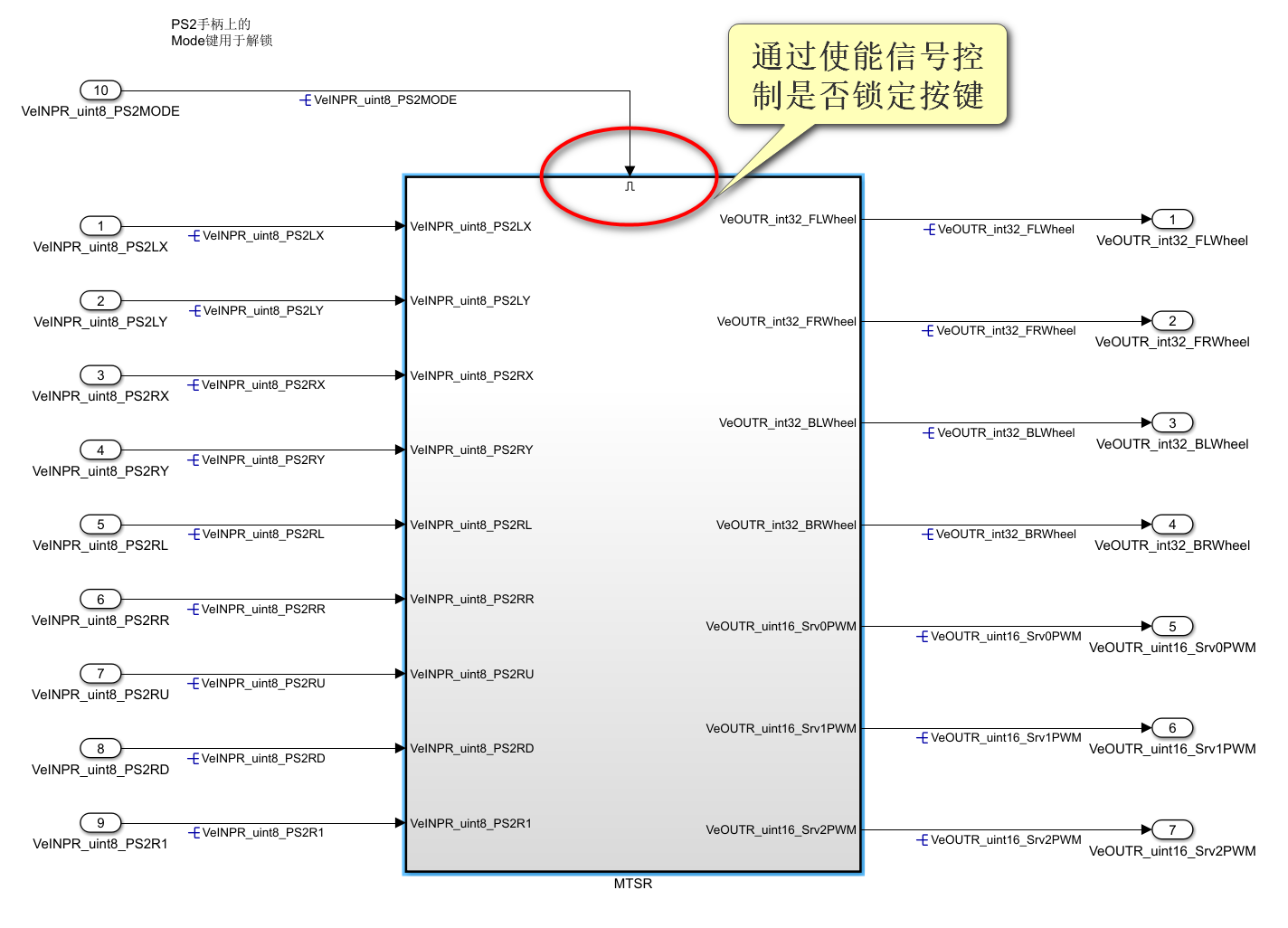
如上图所示,VeINPR_uint8_PS2MODE变量控制这个子系统的使能。双击进入使能子系统后,其中的每个输出Port需要特别注意。
1)对于4个直流电机调速的参数VeOUTR_int32_XXWheel,Initial Output定义为0,Output when disabled选择为reset,如下图所示。
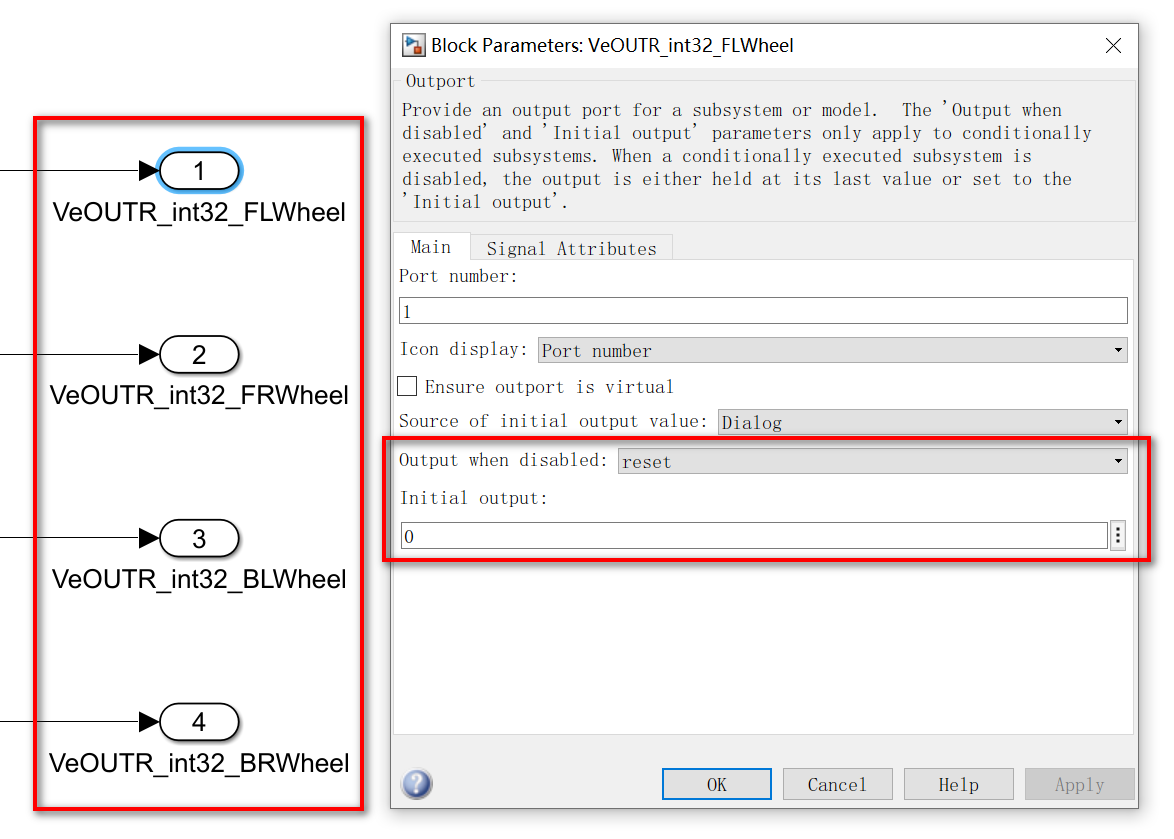
Initial Output定义为1500,表示初始时刻4个电机转速为0。Output when disabled选择为reset,表示使能子系统失能的时候,输出的电机调速参数会重置(reset)为0,无论怎么动摇杆,电机都保持停止转动。
2)对于2个舵机位置的PWM参数VeOUTR_uint16_SrvXPWM,Initial Output定义为1500,Output when disabled选择为held,如下图所示。
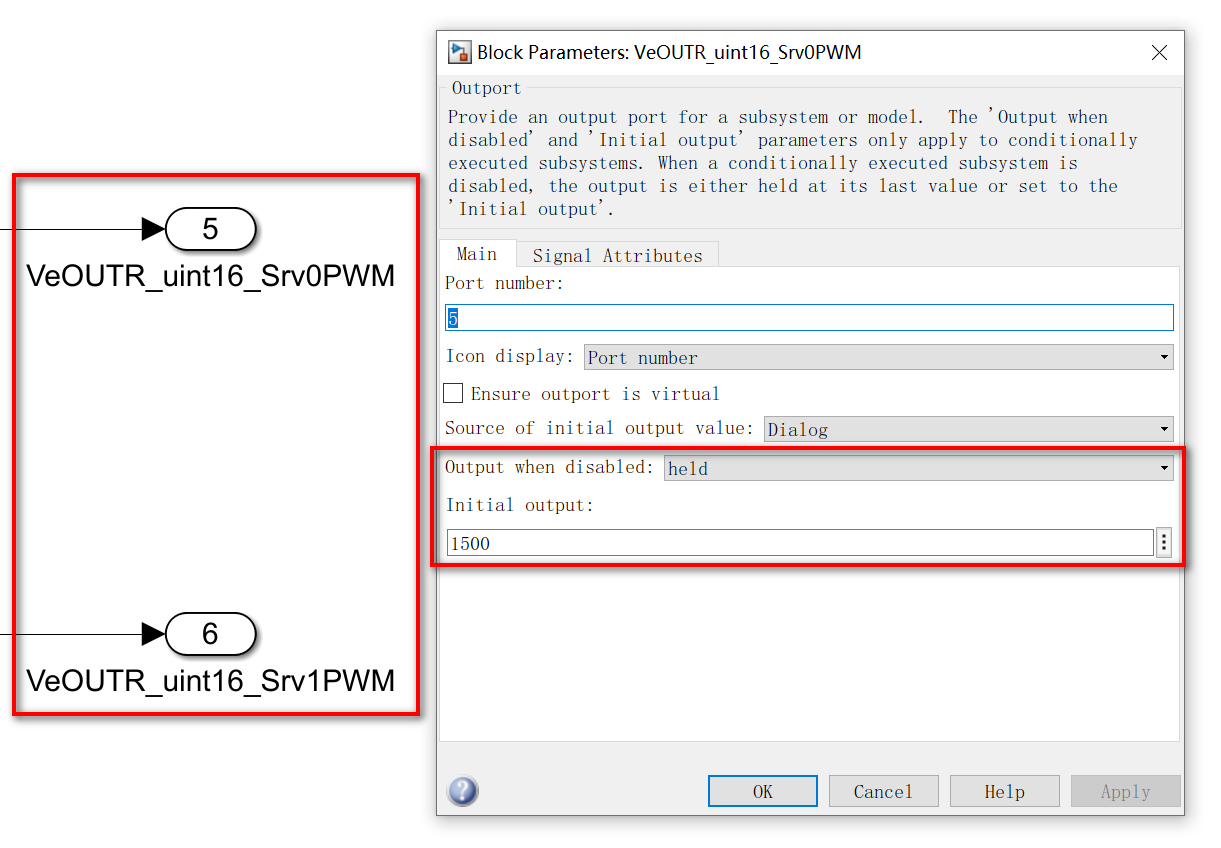
Initial Output定义为1500,表示初始时刻舵机处于中间位置(1500是500和2500的平均值)。Output when disabled选择为held,表示当子系统失能的时候,舵机位置仍然保持不变(held)。
3)对于继电器控制信号,沿用了舵机的PWM参数VeOUTR_uint16_Srv2PWM,Initial Output定义为500,Output when disabled选择为reset,如下图所示。

Initial Output定义为500,表示初始时刻继电器的信号端输入低电平(500对应的电压大概是0.1V)。Output when disabled选择为reset,表示当子系统失能的时候,继电器的信号端输入重置(reset)为低电平。
2.2 电机控制模块
电机控制模块是为了实现功能分析阶段中提出的第2条底盘平面运动功能,对应的子系统是第二层的电机控制子系统。该子系统在软件架构设计阶段就已经建立完成。
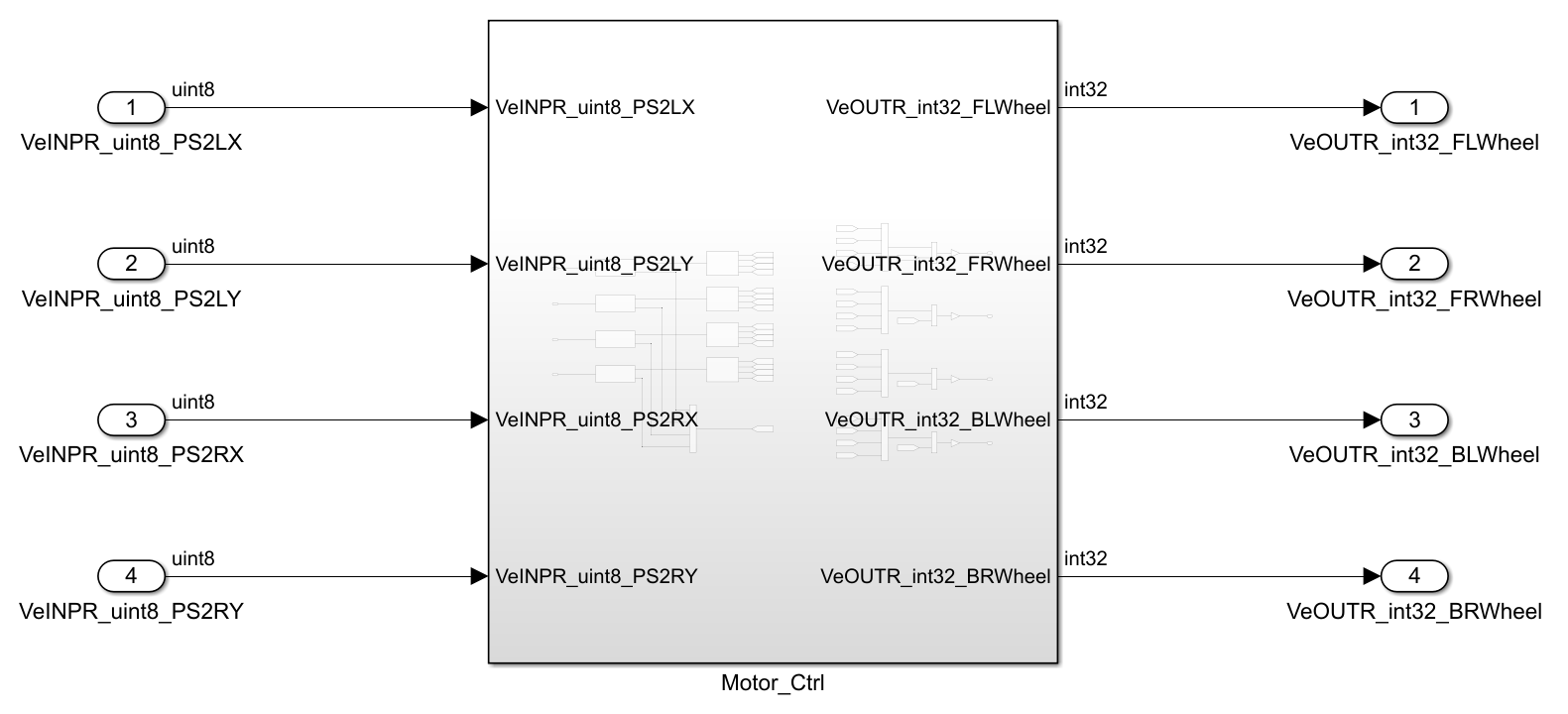
如上图所示,子系统的输入是4个摇杆通道对应的信号,输出是4个电机接口函数传入的参数。
双击进入电机控制子系统Motor_Ctrl,其中包含两大块内容,分别是摇杆信号解析(左)和电机参数计算(右),如下图。后面会按照信号流的过程,来解释一下从输入到输出中间做了些什么。
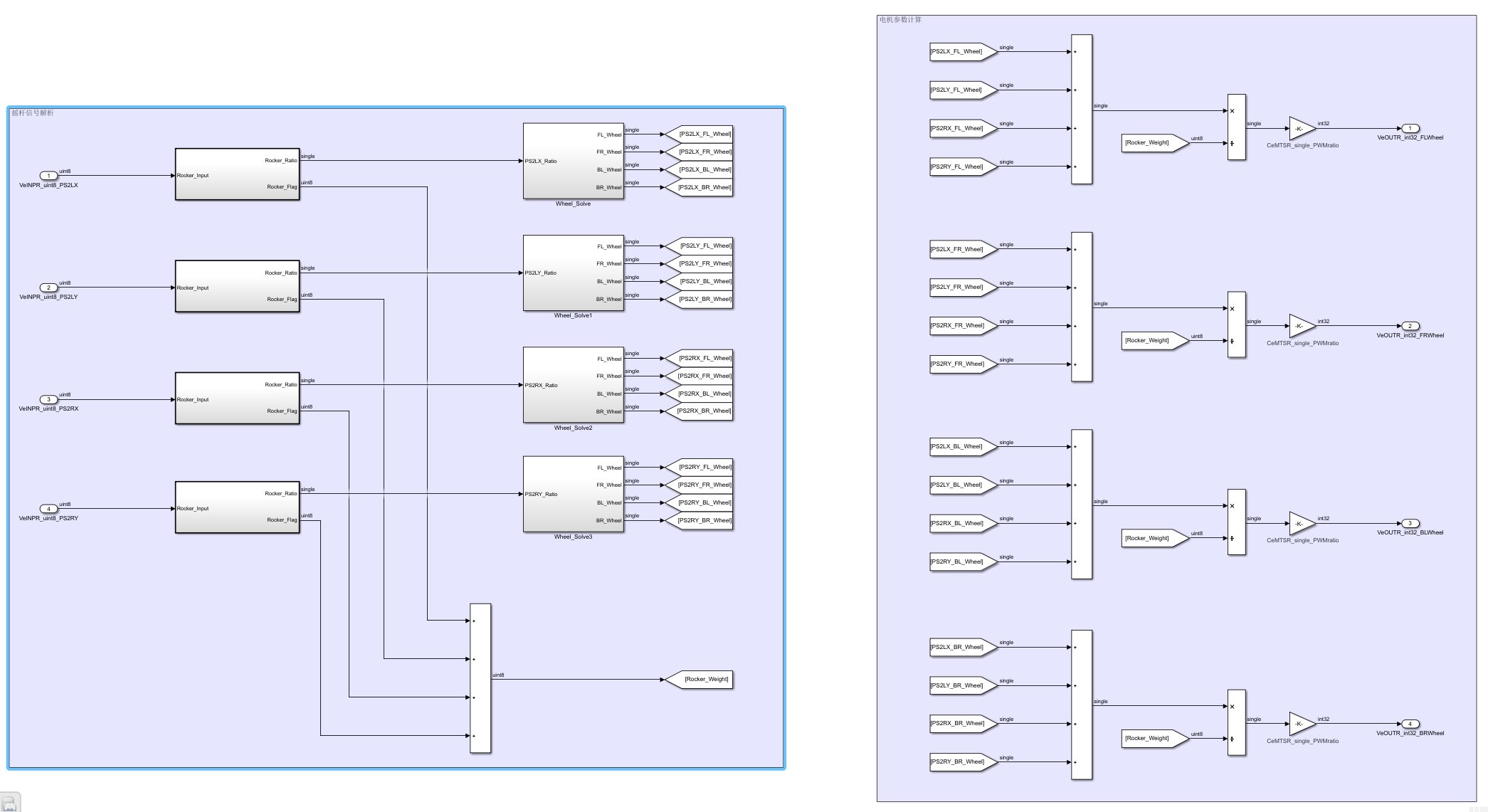
2.2.1 摇杆信号解析
1)4个通道的摇杆信号首先会经过同样的子系统Rocker_Solve,计算出它的比例(Rocker_Ratio)和激活标志(Rocker_Flag),如下图所示。
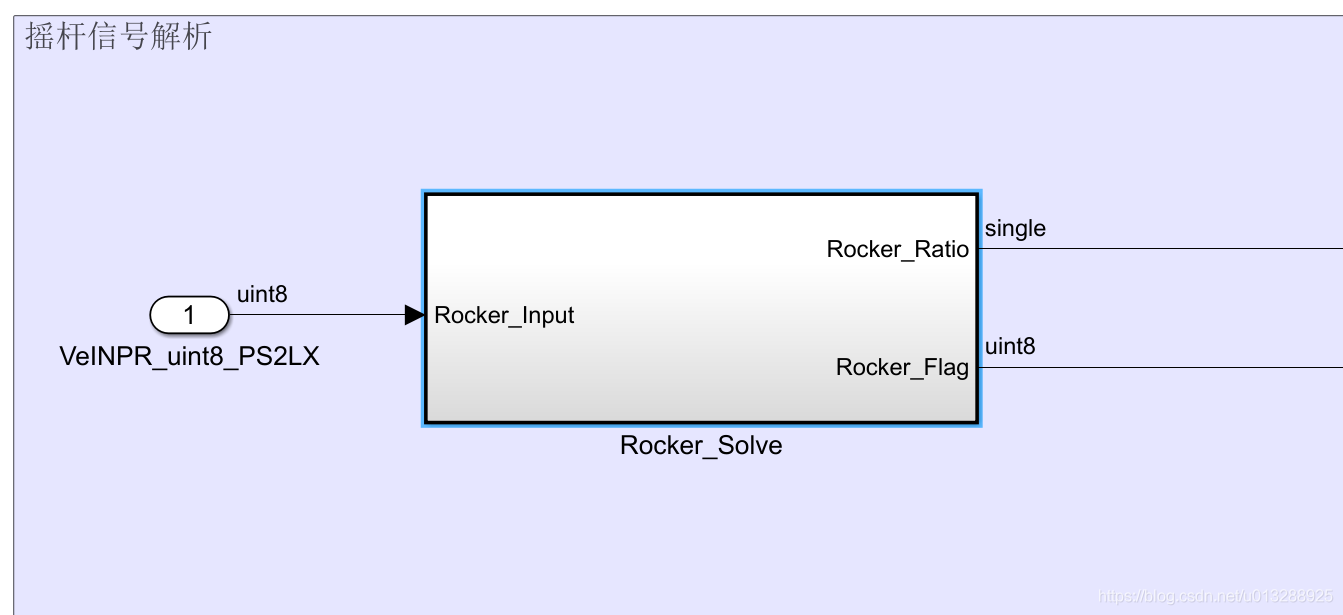
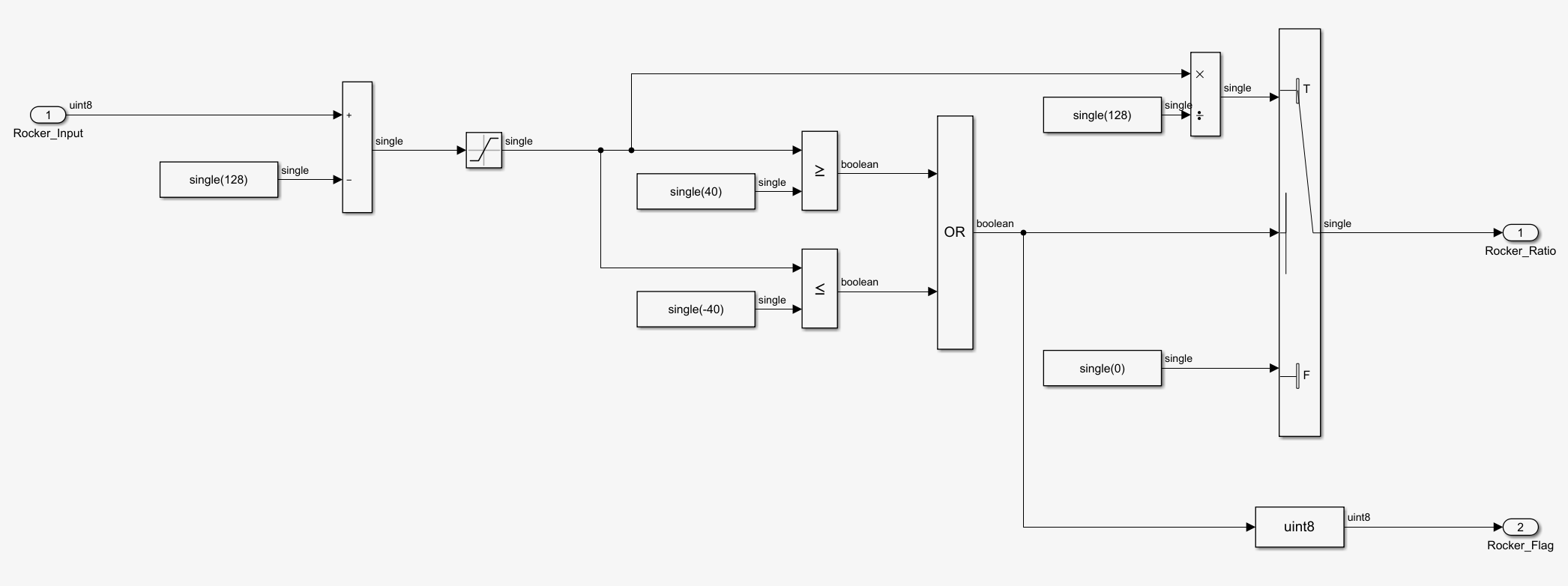
摇杆比例(Rocker_Ratio)的范围是-1~1的浮点数,包含了摇杆运动的正负方向和相对于极限值的比例;激活标志(Rocker_Flag)的范围是0或1的正整数,表示是否被激活。内部逻辑其实很简单,就是简单地把输入做了个除法和判断。
由于4路通道都要进行这个计算,所以博主把这个模块做成了一个库(Lib),并配置成原子子系统,以便生成代码的时候可以重复调用一个函数。
2)对于输出的摇杆比例(Rocker_Ratio),会根据该通道的来计算出这个比例所对应的四轮参数值。计算方法是根据功能分析阶段中的运动规律图得出。
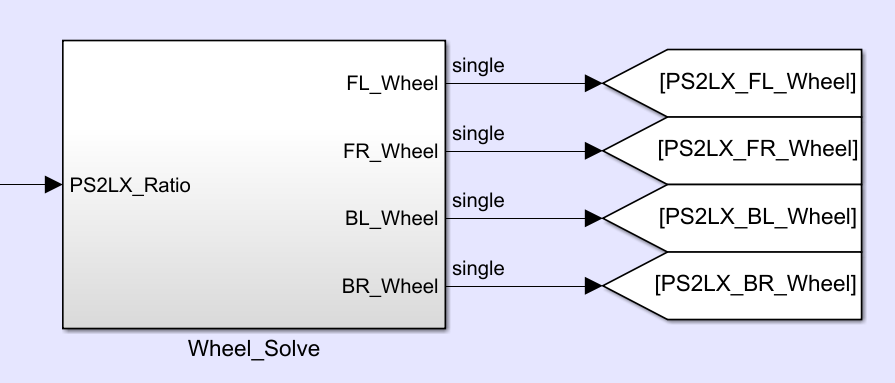
进入Wheel_Solve子系统,可以看到通过Gain模块,对方向做了一个转换。
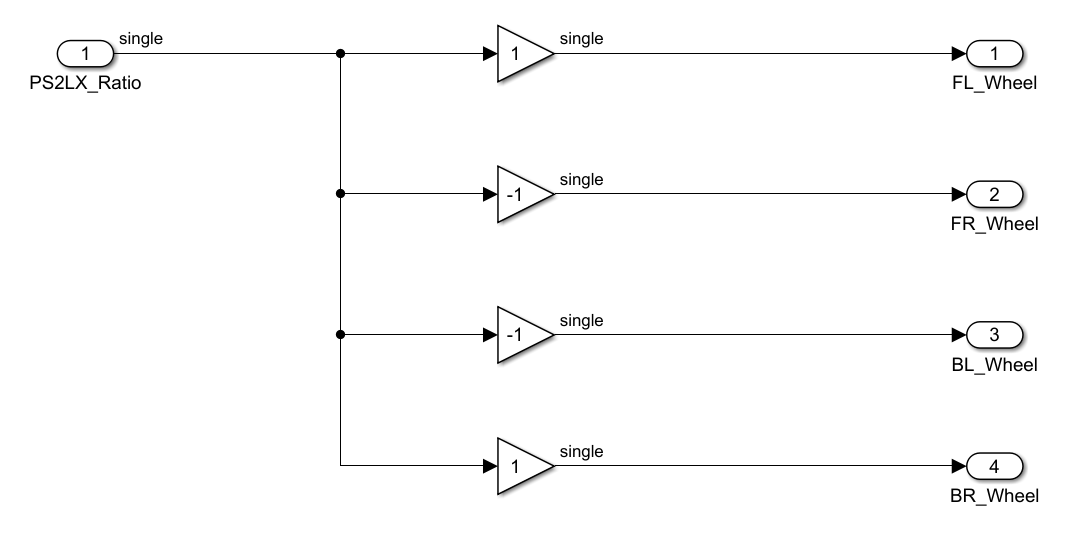
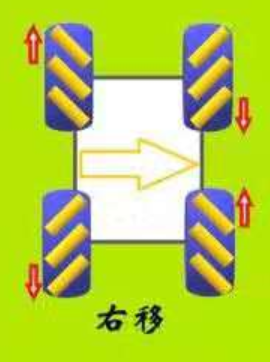
这里进行一个说明。左前轮(FL_Wheel)、右后轮(BR_Wheel)与PS2LX_Ratio符号一致,右前轮(FR_Wheel)、左后轮(BL_Wheel)与PS2LX_Ratio符号相反。和运动关系图中的右平移运动相吻合。左平移和右平移相反,但是摇杆符号也是负号,所以也是适用于Wheel_Solve的计算方法。
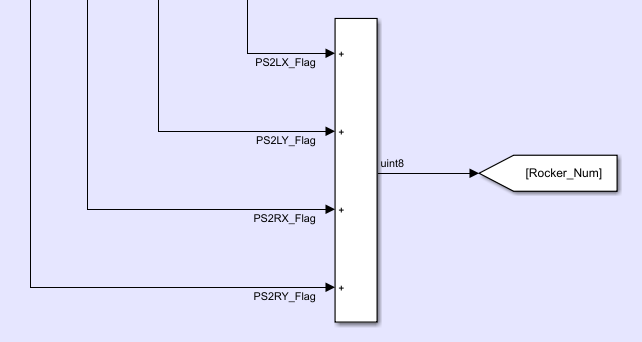
3)将4个通道解析出来的激活标志(Rocker_Flag)相加,得出当前周期内,总共有多少通道被激活(Rocker_Num)。
2.2.2 电机参数计算
在功能分析阶段中将底盘平面运动分成基本运动和合成运动。由于基本运动是合成运动的一种特殊情况,所以在电机参数计算的时候,直接按照合成运动来计算。电机参数计算后会输出四个电机接口的参数。
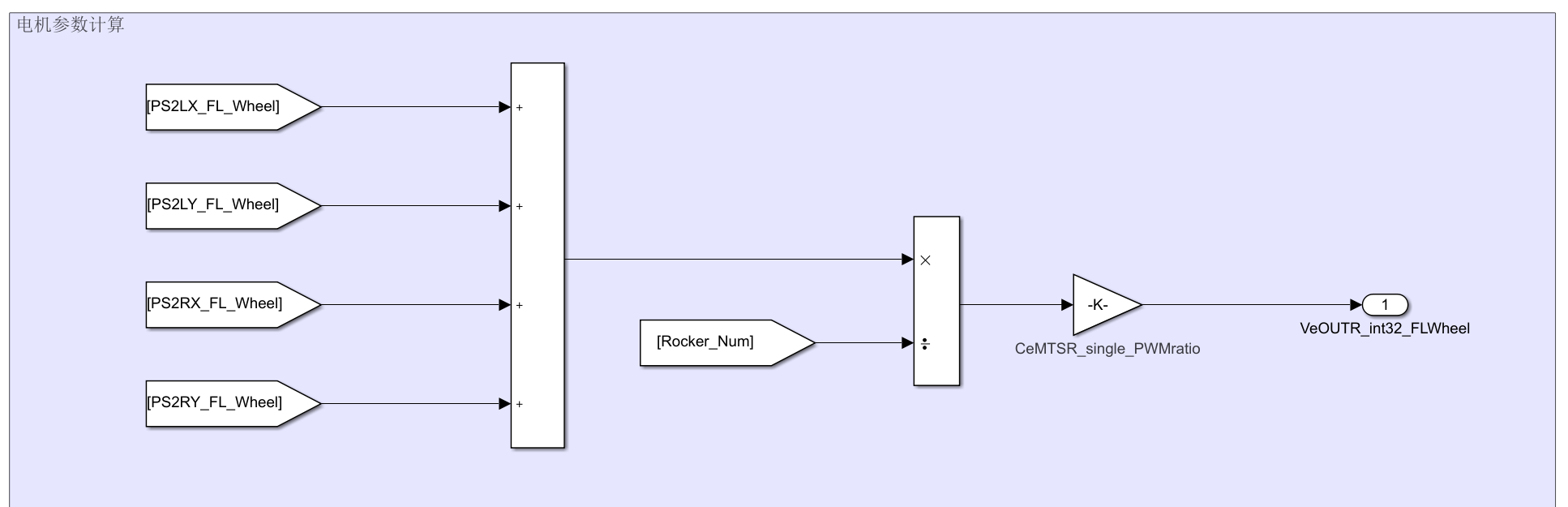
如上图所示是对左前轮(FLWheel)的计算过程,分了三步。首先,将四路摇杆通道算出来的对应的左前轮的值相加。接着将计算的和除以被激活的摇杆数量值(Rocker_Num)。最后乘以一个系数CeMTSR_single_PWMratio,来限值PWM的最大值。
这里有两点解释一下。1)相加后再除以数量表示对最终参数影响的平均效果;2)乘以系数是为了限制输出的最大电压,这个系数在数据字典中定义。
2.3 舵机控制模块
电机控制模块是为了实现功能分析阶段中提出的第3条舵机云台二自由度运动功能,对应的子系统是第二层的舵机控制子系统。该子系统在软件架构设计阶段就已经建立完成。
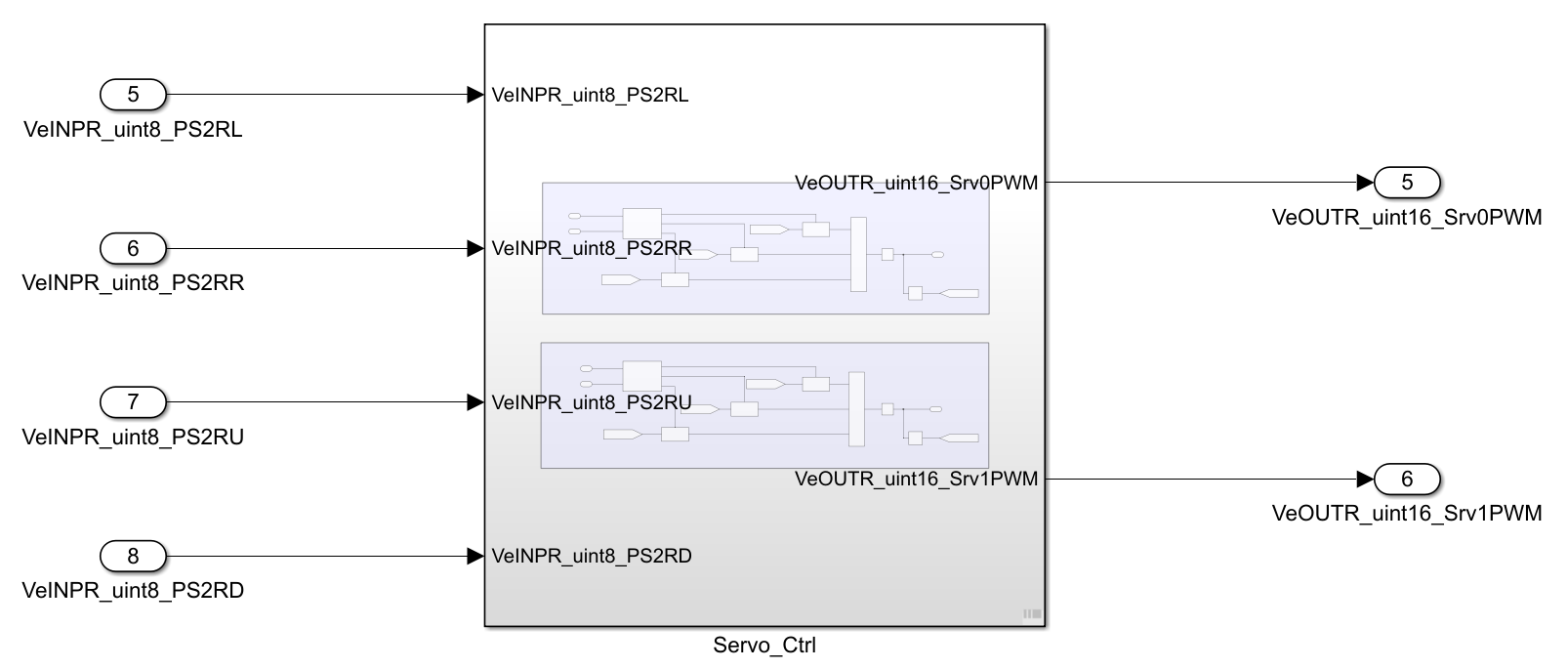
如上图所示,子系统的输入是4个按键对应的信号,输出是2个舵机接口函数传入的第2个参数参数,也就是位置参数。
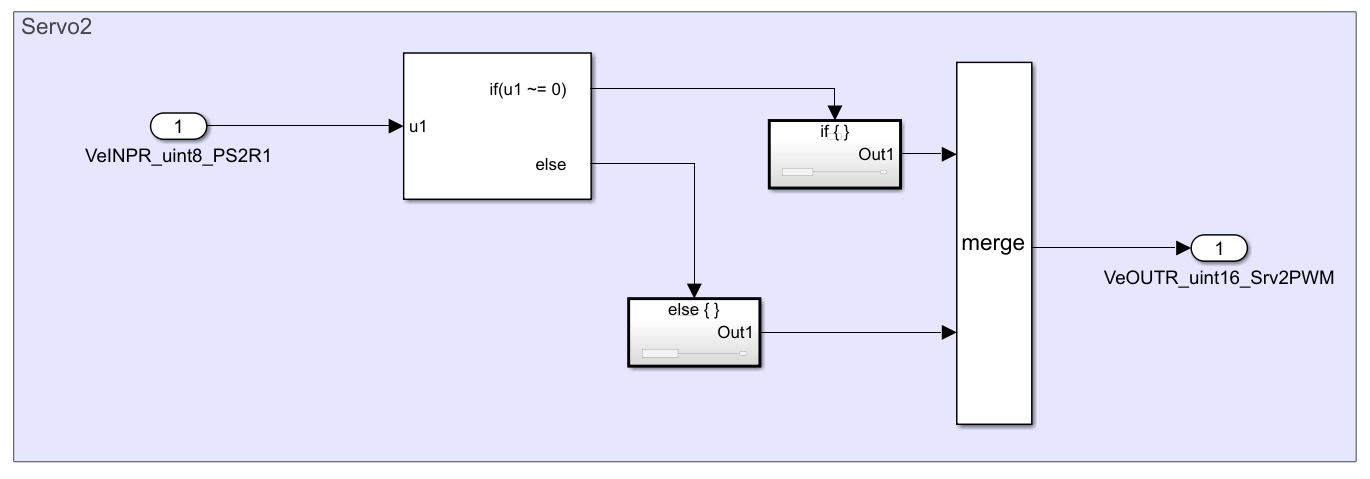
双击进入Servo_Ctrl子系统,控制逻辑如下图。
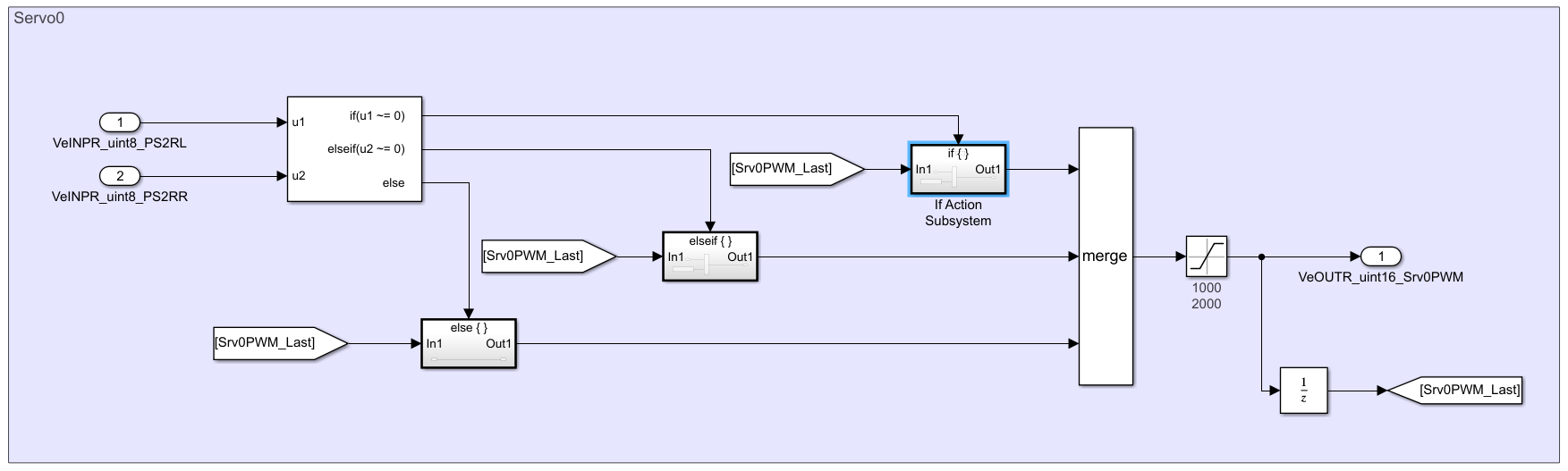
if模块先通过两个按键输入,判断舵机应该正转还是反转;接着UnitDelay的结果作为if-Action子系统的输入,if-Action子系统中加上或者减去一个数值,然后输出该周期时舵机应该处于什么位置;最后用Saturation模块对位置信号做限值,1000~2000表示舵机位置从45度到135度。舵机控制模块总体还是很简单的。
2.4 继电器控制模块
继电器控制模块是为了实现功能分析阶段中提出的第4条发射器控制功能,对应的子系统是第二层的水弹枪控制子系统。该子系统在软件架构设计阶段就已经建立完成。

如上图所示,子系统的输入是R1按键对应的信号,输出是第3个舵机接口函数传入的第2个参数参数,因为在软件架构设计阶段中采用舵机接口来控制继电器。
双击进入Gun_Ctrl子系统,控制逻辑如下图。
这个子系统应该是最简单的(虽然其他的也很简单),只用了一个if-else判断输入信号,然后决定输出信号是高电平(19500)还是低电平(500)。
3 总结
博主在本章中简单的介绍了一下自己控制机甲大师的软件单元。事实上,机甲大师的内部控制算法可以有非常多值得研究的技术点。但是本系列博客的重点在于<基于模型设计>这套方法流程,最终走通了这套流程以后,可以回来修改模型并加以验证,不断优化其中的算法。
评论记录:
回复评论: