
1. 源由
为了更好的配合无GPS环境下的视觉定位验证,同时增加验证的安全性,期望先在Rover上做测试。
其主要思路仍然考虑使用《Ardupilot & OpenIPC & 基于WFB-NG构架分析和数据链路思考》。
算法前置应该不是问题,已经有很多复制验证。而我们主要的目的是算法后置,而这里的主要问题就是时序和算法估算性能、效率、准确性的问题。
不管最终结果如何,先将验证平台搭建起来。
2. 整备
类似《Ardupilot开源飞控之FollowMe验证平台搭建》,整理硬件如下:
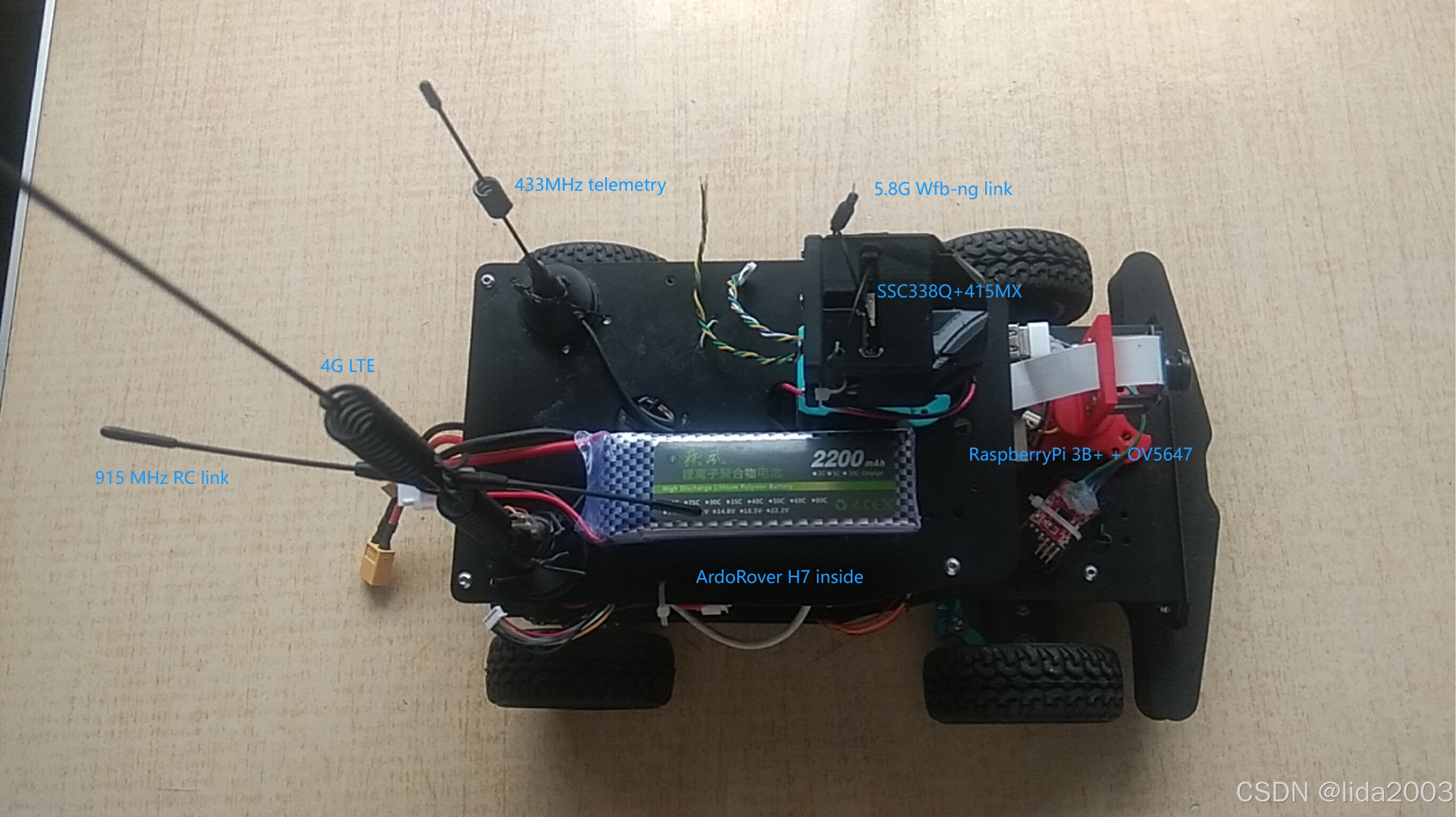
- 915MHz RC遥控链路
- 433MHz 电传数据链路
- 5.8G/2.4G 图传数据链路
- Ardupilot H743 AKM 小车
- IMX415 + SSC338Q + 8812 EU
- OV5647 + Raspberry Pi3B+ + USB WiFi/4G LTE
IMX415 ─────> SSC338Q ─────── 8812EU ──+─── pad(8812AU)
│ │
│ +───────── 915MHz ────── TX12
│ │ │
ArduRover │ +────────+
│ │ +── 8812AU │
│ +───────── 433MHz ────── │ │
│ │ │
OV5647 ──> Raspberry Pi 3B+ ── USB WiFi───── │ server │
│ │ │
4G LTE ────────── VPN ──────── │ │
+────────+
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
3. 测试
3.1 90度全遮挡
第一个1080P的OpenIPC ArduRover 4.5 AKM小车
800mW 8812EU 90度转弯全遮挡情况下,行进4.5 x 9 ~= 40米,信号正常,未见明显延迟和显著丢包。
3.2 雨天信号测试
OpenIPC Continuous Signal Test: Power or Rain issue?
下雨确实会对RF(射频)信号的传输距离产生影响,尤其是在高频段(例如微波频段)。这是由于雨衰减(rain attenuation)现象,主要涉及以下几个原理:
-
水滴的吸收和散射:
雨水中的水滴对RF信号具有吸收和散射作用。RF信号是一种电磁波,当电磁波穿过雨水时,水滴中的水分子会吸收电磁波的能量,从而减弱信号强度。同时,水滴还会导致信号的散射,使得原本的信号能量分散开来,进一步减弱接收信号的强度。 -
频率与雨衰减的关系:
雨衰减的程度取决于RF信号的频率。通常情况下,频率越高,雨衰减越明显。例如,微波频段(3 GHz以上)和毫米波频段(30 GHz以上)的信号对雨衰减更为敏感。而低频的信号(如VHF、UHF)对雨衰减的影响较小。 -
路径长度:
信号在雨中传播的距离越长,受到的雨衰减就越大。因此,雨天时,RF信号的有效传输距离会缩短,尤其是在较高频段的通信中,例如卫星通信、5G毫米波通信和无线电链路。 -
相对湿度和雨量的影响:
除了降雨本身,相对湿度也会对RF信号产生一定影响。当空气中的湿度增加时,水分子吸收RF信号的能力增强,导致信号衰减。此外,降雨强度(雨量)越大,信号的衰减就越明显。
总结来说,下雨会减少RF信号的传输距离,特别是在高频段。其主要原因是雨滴对电磁波的吸收和散射作用导致信号强度减弱,这种现象随着频率的提高变得更加显著。
4. 参考资料
【1】Ardupilot开源代码之Rover上路计划
【2】Ardupilot开源代码之Rover上路 - 后续1
【3】Ardupilot开源代码之Rover上路 - 后续2
【4】Ardupilot开源代码之Rover上路 - 后续3
【5】Ardupilot开源代码之Rover上路 - 后续4

评论记录:
回复评论: