
0. 项目地址:Mobile ALOHA
GitHub - MarkFzp/act-plus-plus: Imitation learning algorithms with Co-training for Mobile ALOHA: ACT, Diffusion Policy, VINN https://github.com/MarkFzp/act-plus-plus
https://github.com/MarkFzp/act-plus-plus
1. 环境配置
新建Pycharm工程,从github上下载项目拷贝过去,在termina里进行环境配置:
1.1 安装部分依赖项
- conda create -n aloha python=3.8.10
- conda activate aloha
- pip install pyquaternion
- pip install pyyaml
- pip install rospkg
- pip install pexpect
- pip install mujoco==2.3.7
- pip install dm_control==1.0.14
- pip install opencv-python
- pip install matplotlib
- pip install einops
- pip install packaging
- pip install h5py
- pip install ipython
- pip install diffusers
- cd act/detr && pip install -e .
1.2 安装torch
pytorch需要单独安装,保证安装的是gpu版本,根据自己的cuda版本在torch官网选择安装命令:
conda install pytorch torchvision torchaudio pytorch-cuda=11.8 -c pytorch -c nvidia不需要额外安装cudNN
1.3 安装egl-probe
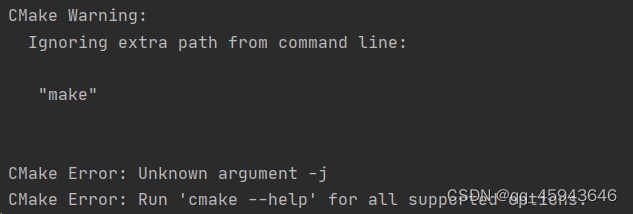
egl-probe直接安装(pip install or pip build)会有一些问题(如下图所示:找不到egl-probe.glad package&&CMake指令报错),需要去github下载源码进行编译安装。

i.首先安装一下CMake进行后续编译
pip install CMakeii.从egl-probe的github项目地址拉取源代码
iii.修改setup.py如下(注释掉的是原来的)
- # build using cmake
- #subprocess.check_call("cmake ..; make -j", cwd=build_dir, shell=True)
- subprocess.check_call("cmake ..", cwd=build_dir, shell=True)
-
- # build using cmake
- #subprocess.check_call("cmake ..; make -j", cwd=build_dir, shell=True)
- subprocess.check_call("cmake ..", cwd=build_dir, shell=True)
iv.编译并安装egl-probe
- #先进入到下载的egl-probe项目根目录里
- cd egl_probe-master
- python setup.py build
- python setup.py install
-
至此,egl-probe终于安装完成了(和gpt勾心斗角了好久)
1.4 Robomimic
Robomimic是斯坦福大学开发的一个用于机器人演示学习的框架。它提供了在机器人操作领域收集的广泛的演示数据集,以及从这些数据集学习的学习算法。该项目是通过模拟环境更深层次的推进机器人智能(ARISE)计划的一部分,旨在降低人工智能和机器人交叉领域前沿研究的进入门槛。
直接pip安装Robomimic框架后会报错:
- ModuleNotFoundError: No module named 'robomimic.algo.diffusion_policy'
- # 原因:robomimic的release版本还不支持diffusion_policy模块。
下载,离线安装diffusion-policy-mg分支即可:
1.5 util
配置环境的最后一步,安装detr所需要的util库,这个库已经在Mobile ALOHA的源码里了,路径为
act-plus-plus-main\detr\util将util整个文件夹复制到刚才创建的conda虚拟环境下的这个路径:
D:\Anaconda3\envs\aloha\Lib\site-packages2.SIM仿真环境训练
2.1数据集构建
模拟实验(LEGACY table-top ALOHA environments)数据集收集
模拟实验(LEGACY table-top ALOHA environments)中运行sim_transfer_cube_scripted任务,生成50集脚本数据,运行:
- python record_sim_episodes.py --task_name sim_transfer_cube_scripted --dataset_dir dir> --num_episodes 50
-
- #运行示例
- python record_sim_episodes.py --task_name sim_transfer_cube_scripted --dataset_dir data/sim_transfer_cube_scripted --num_episodes 50
若要实时查看仿真环境数据收集效果,可以在上述运行代码后加上:
--onscreen_render50个demo以hdf5格式保存至--dataset_dir
- python record_sim_episodes.py --dataset_dir dir> --episode_idx
-
- #运行示例
- python visualize_episodes.py --dataset_dir data/sim_transfer_cube_scripted --episode_idx 0
(可选:直接下载项目自带的模拟数据集)
最终,将数据集目录更改成如下格式:
- act-plus-plus/data
- ├── sim_insertion_human
- │ ├── episode_0.hdf5
- ├── ...
- ├── sim_insertion_scripted
- │ ├── episode_0.hdf5
- ├── ...
- ├── sim_transfer_cube_human
- │ ├── episode_0.hdf5
- │ ├── ...
- └── sim_transfer_cube_scripted
- ├── episode_0.hdf5
- ├── ...
2.2训练
i. 修改数据集读取路径,找到constants.py,修改如下
- ### Task parameters
- #DATA_DIR = '/home/zfu/interbotix_ws/src/act/data'
- DATA_DIR = 'D:/aloha/data'
DATA_DIR是存放数据集的位置,每个子文件夹对应着训练的子任务,名字一一对应。
ii. 修改源码,找到/detr/model/detr_vae.py文件285行,修改如下
- #encoder = build_transformer(args)
- encoder = build_encoder(args)
iii. 运行训练命令:
- python imitate_episodes.py --task_name sim_transfer_cube_scripted --ckpt_dir
dir> --policy_class ACT --kl_weight 10 --chunk_size 100 --hidden_dim 512 --batch_size 8 --dim_feedforward 3200 --num_steps 2000 --lr 1e-5 --seed 0 -
-
- #运行示例
- python imitate_episodes.py --task_name sim_transfer_cube_scripted --ckpt_dir trainings --policy_class ACT --kl_weight 1 --chunk_size 10 --hidden_dim 512 --batch_size 1 --dim_feedforward 3200 --lr 1e-5 --seed 0 --num_steps 5
-
- # 训练时会提示下面内容,由于没有W&B account,直接选择3
- wandb: (1) Create a W&B account
- wandb: (2) Use an existing W&B account
- wandb: (3) Don't visualize my results
- wandb: Enter your choice:
出现如下界面训练成功开始:

2.3 可选:使用wandb(官方使用手册):
i. 注册wandb账号,获取API密钥
ii. 在imitate_episodes.py里插入密钥
os.environ["WANDB_API_KEY"] = '密钥'iii. 设置proxy
- set HTTP_PROXY=http://127.0.0.1:7890
- set HTTPS_PROXY=http://127.0.0.1:7890
iv.简单修改imitate_episodes.py并使用
- #wandb.init(project="mobile-aloha2", reinit=True, entity="mobile-aloha2", name=expr_name)
- wandb.init(project="myaloha",name=expr_name)
2.4 测试
python imitate_episodes.py --eval --task_name sim_transfer_cube_scripted --ckpt_dir trainings\test1 --policy_class ACT --kl_weight 10 --chunk_size 100 --hidden_dim 512 --batch_size 8 --dim_feedforward 3200 --lr 1e-5 --seed 0 --num_steps 100 --onscreen_render要评估策略,运行相同的命令,但要添加--eval,这将加载最佳验证检查点。sim_transfer_cube的成功率约为90%,insertion成功率约为50%。可以添加--onscreen_render来查看评估期间的实时渲染。
对于难以建模的真实世界数据,在损失趋于平稳后,至少训练5000次或3-4倍的时间。有关更多信息,请参考调优提示。如果你的ACT策略不稳定,或者在中间停顿,那就训练更长时间吧!成功率和平滑度可以在损失平台期后提高。
参考博客:
源码复现|10分钟带你复现Mobile ALOHA SIM,超详细教程(附范文+代码) - 知乎 (zhihu.com)
评论记录:
回复评论: