
版本:FreeRTOS Kernel V11.1.0,文末提供最终工程的下载链接。
- 1
一、准备
1. GD32 Keil工程
准备任意一个可以正常运行的GD32工程文件,这里使用的是自己建立的工程模板文件,一个点灯与HelloWorld工程:
![![[Pasted image .png]]](https://img1.iyenn.com/thumb02/c4a7c49eb2c4c4i3/444417353801687355810.jpeg)
2. FreeRTOS源码
首先下载最新的源码:
Download: FreeRTOS Kernel
我们会得到一个压缩文件,然后解压出来备用,现在准备好了一个GD32 Keil工程和一个FreeRTOS源码:
接下来我们开始移植。
二、FreeRTOS移植
1. 文件操作
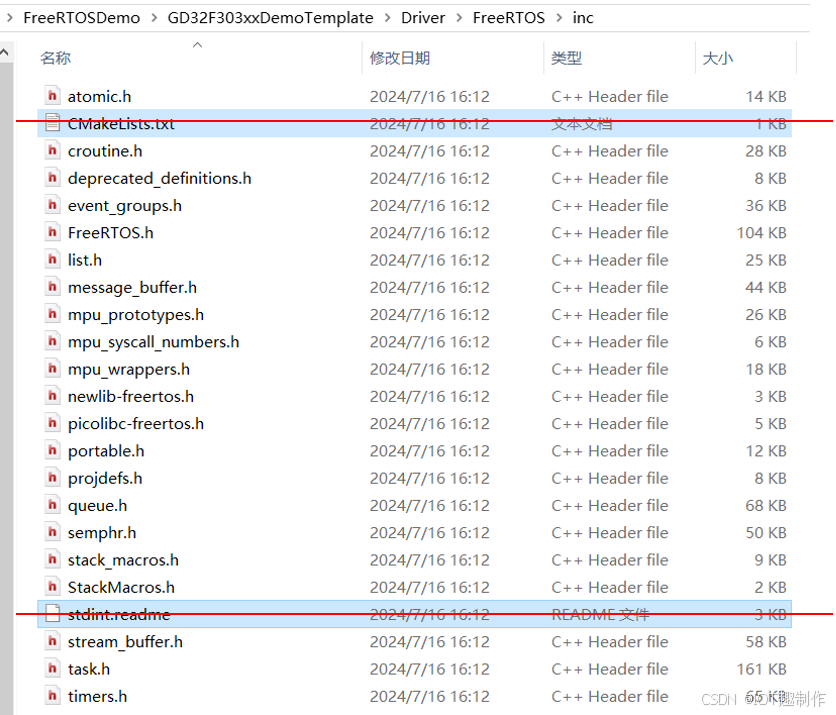
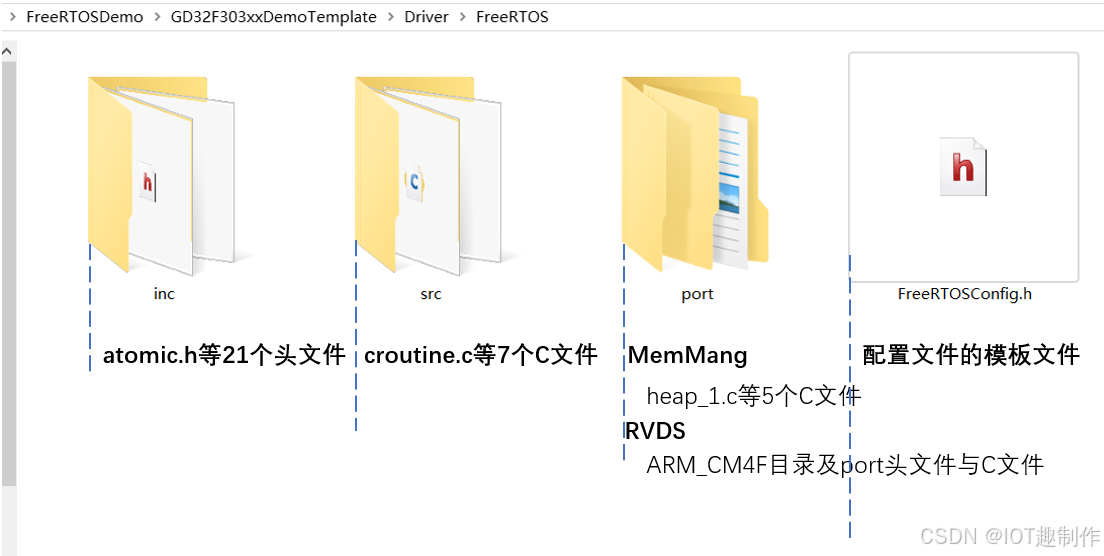
对于移植使用来说,我们主要关注下面这几个FreeRTOS的关键文件,后面都会用到:
![![[Pasted image .png]]](https://img1.iyenn.com/thumb02/c4a7c49eb2c4c4i3/20991735380169359189.jpeg)
首先在GD32工程文件中,找到合适的地方,新建“FreeRTOS”文件夹,并新建三个子文件夹“inc”、“src”、“port”用于存放上述文件:
然后将“.\FreeRTOS\FreeRTOS-Kernel\include”目录下所有文件拷贝到新建的“./FreeRTOS/inc”文件夹下:
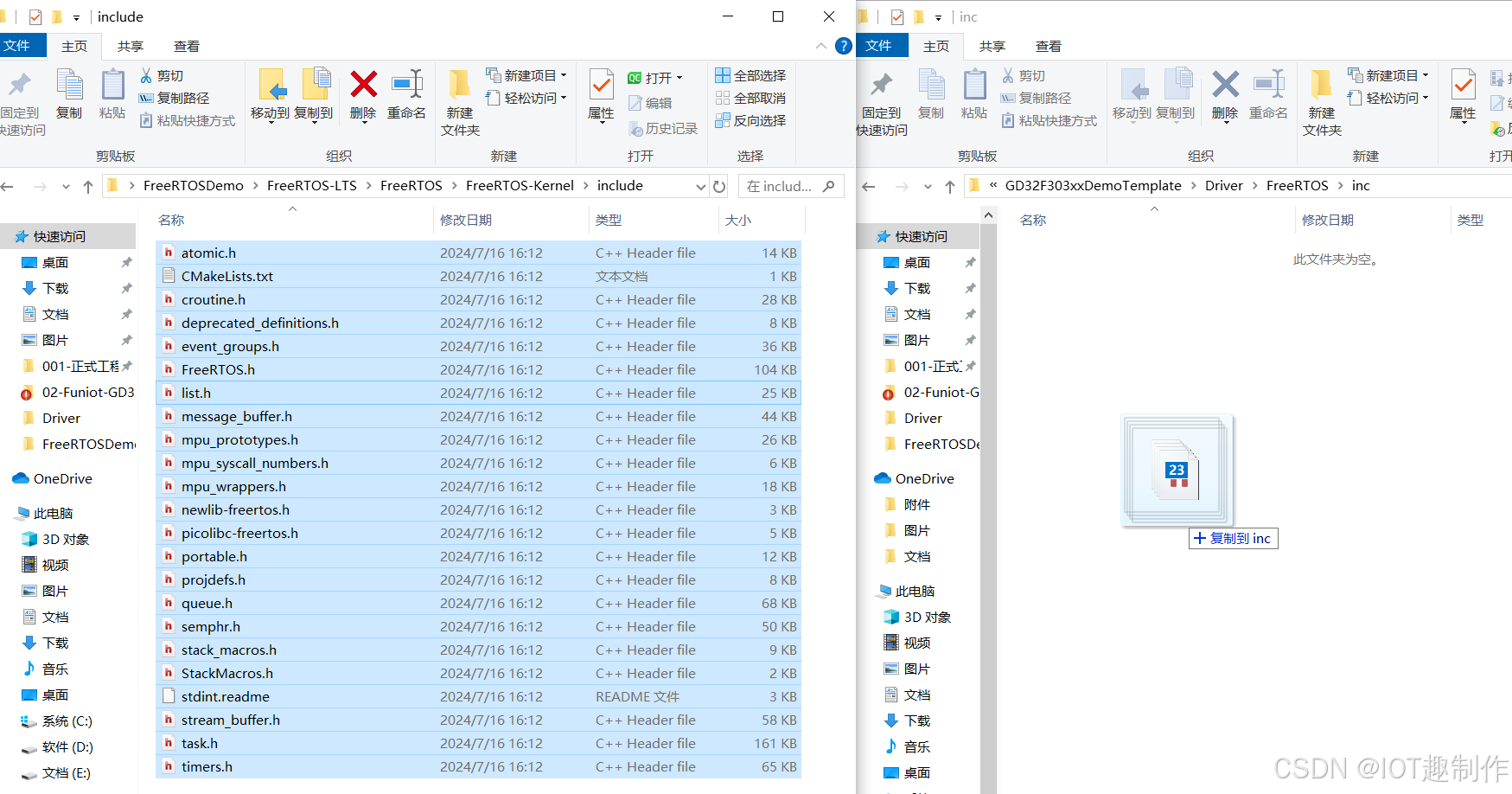
为了简洁,我们删除非.h文件:
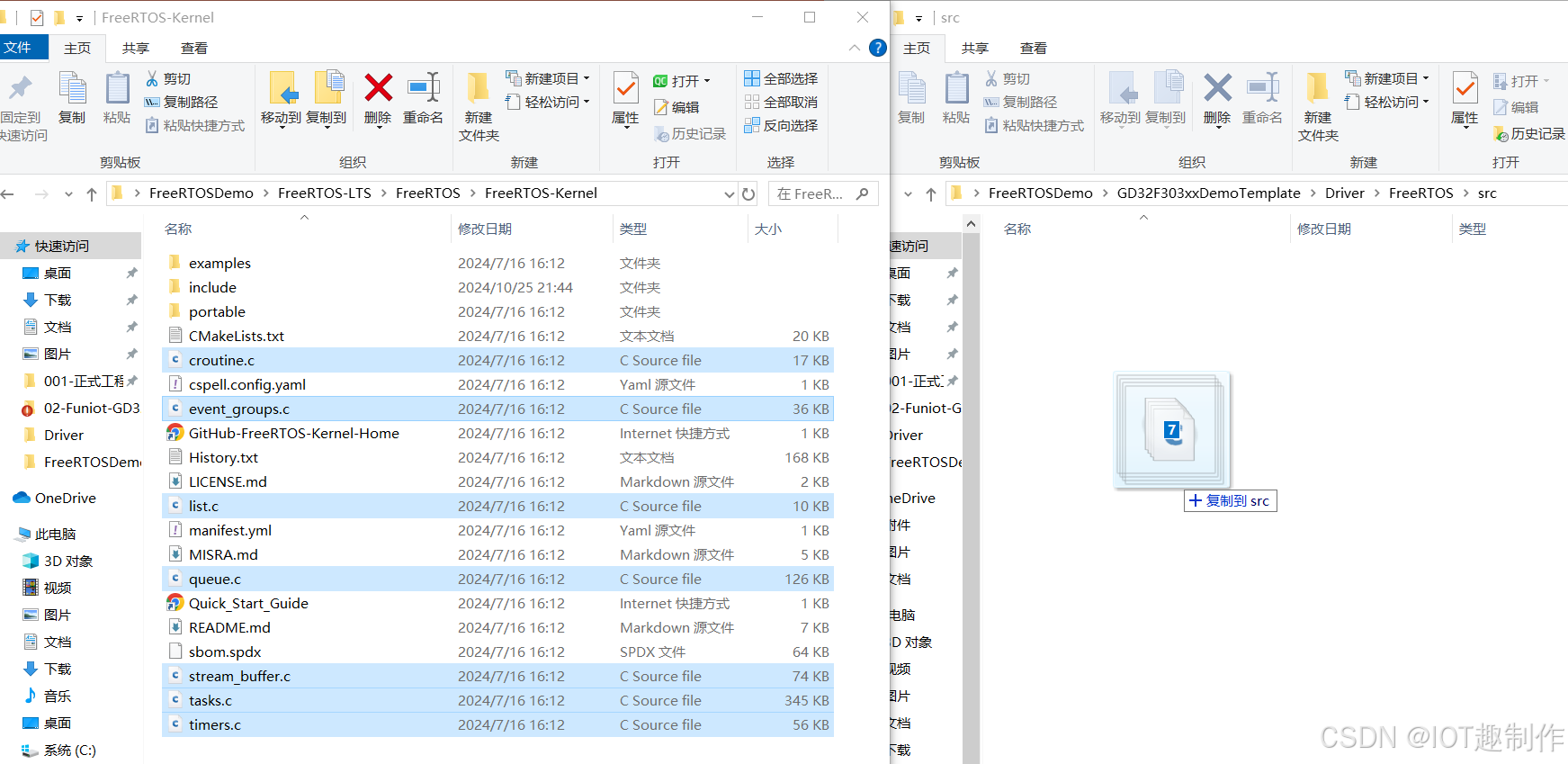
然后把下面这几个C文件拷贝到src目录下:
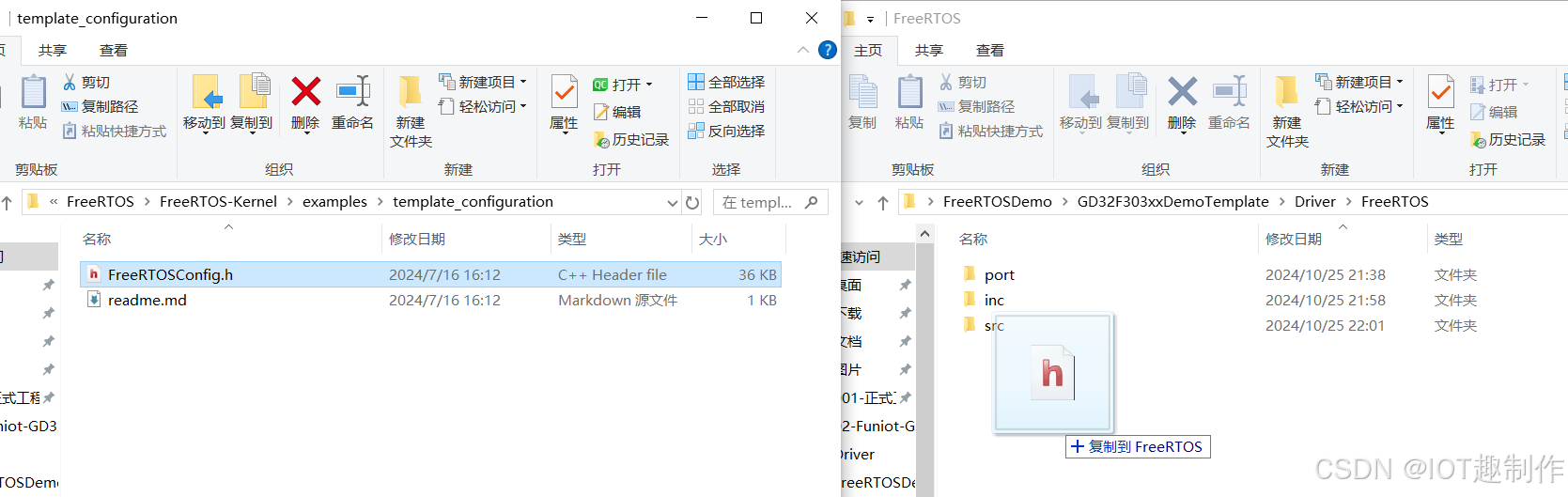
然后将配置文件的模板文件拷贝到“/FreeRTOS”目录下:
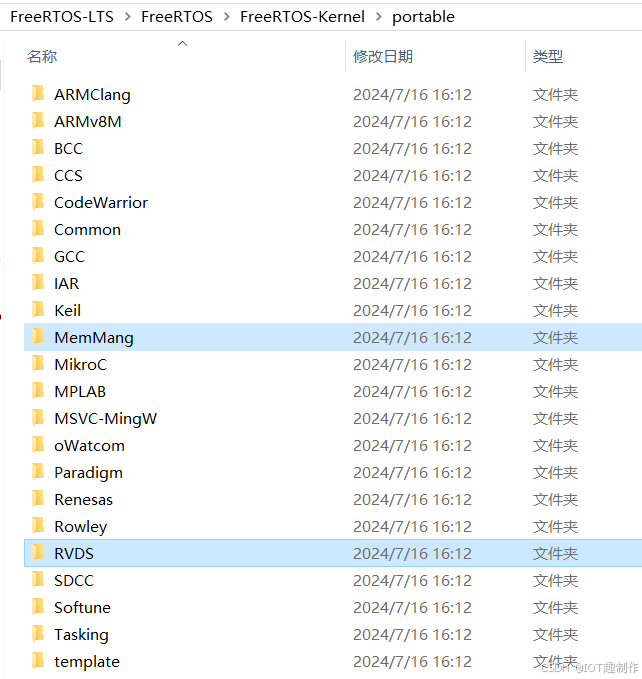
在接口层,我们主要适配内存管理部分和IC硬件上的接口部分,这两个位于“.\FreeRTOS-Kernel\portable”下:
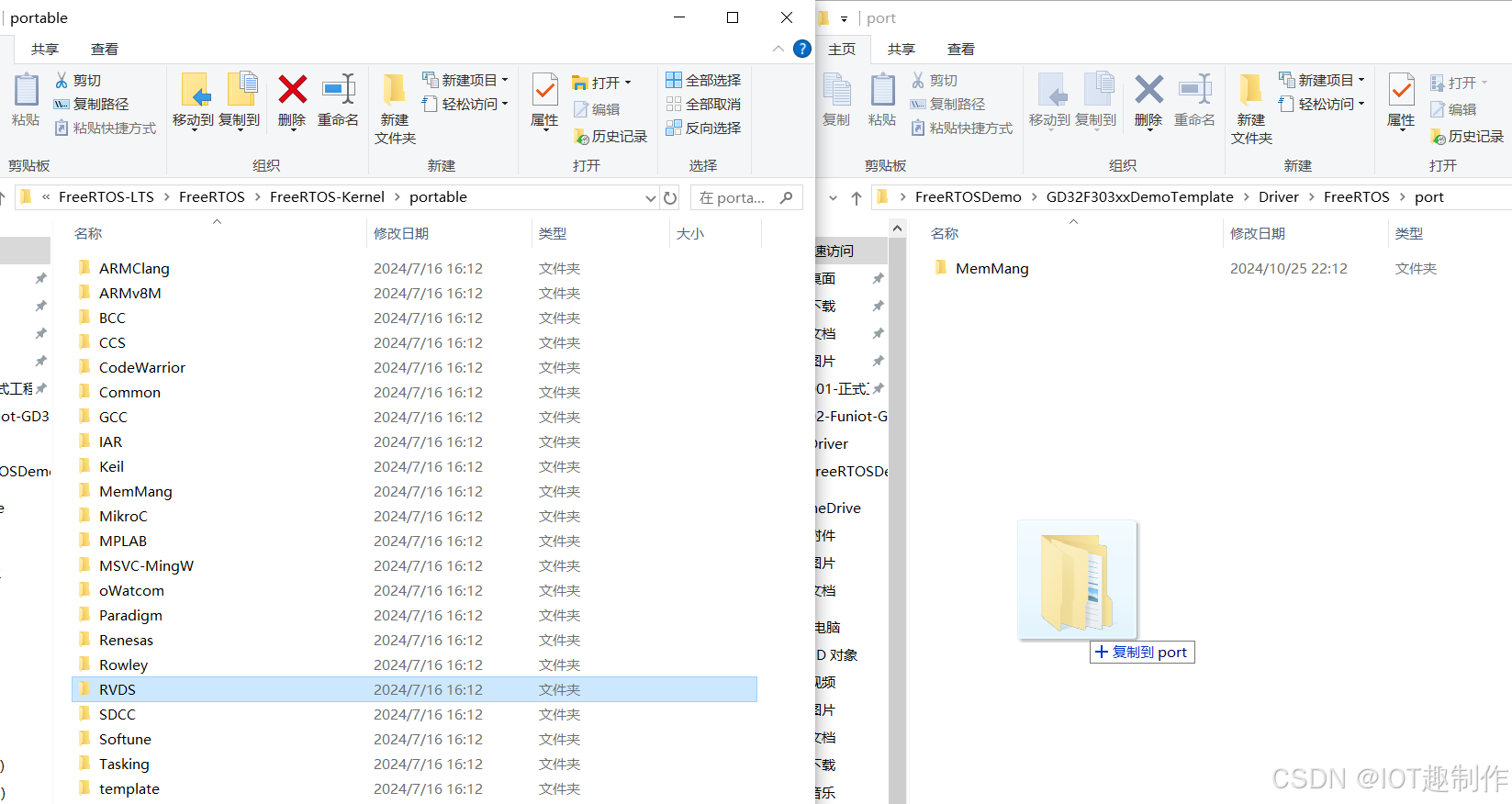
我们把整个“MemMang”目录直接复制到“port”目录下:
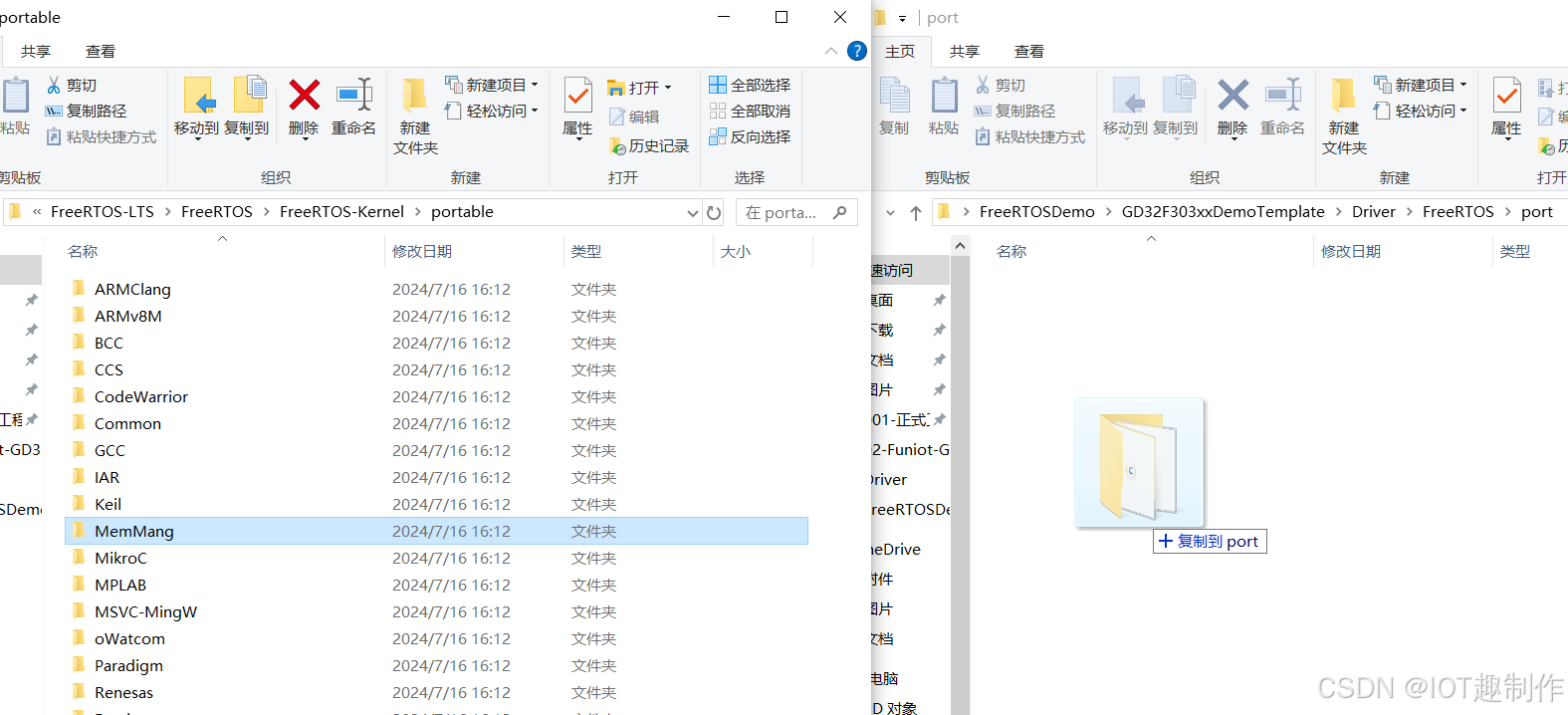
“MemMang”中是FreeRTOS提供的5个内存分配方案:

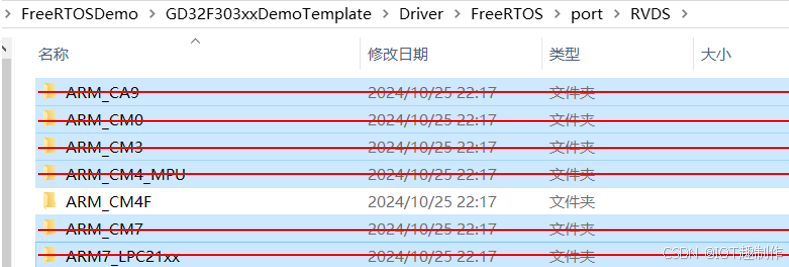
“RVDS”是为编译器提供编译环境所需要的相关文件,我们也把他们拷贝到目录下:
我们需要根据自己的MCU类型去选择,例如我们使用的GD32F303x系列是ARM架构、Cortex-M4的核、不带MPU的MCU,就仅保留"ARM_CM4F"的文件夹:
最终我们操作后的相关文件如下:
接下来我们就要在编译器中将上述文件加载进来
2. 工程操作
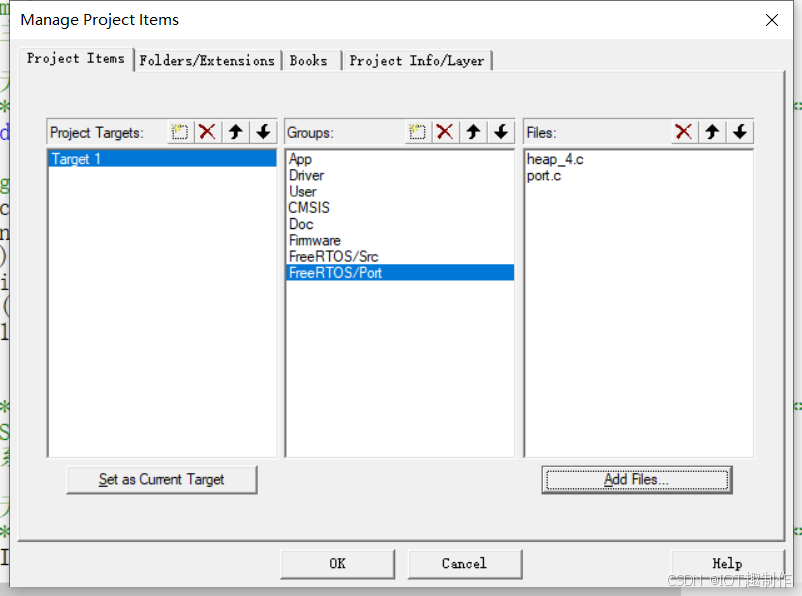
打开工程文件,新建工程资源文件夹“FreeRTOS/Src”和“FreeRTOS/Port”,然后把对应的C文件加载进来:
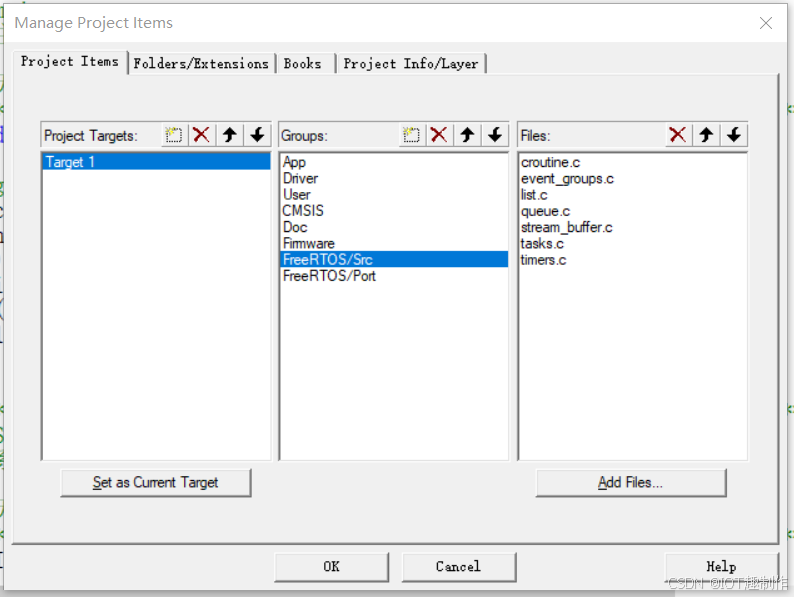
其中内存管理上我们选择“heap_4”:
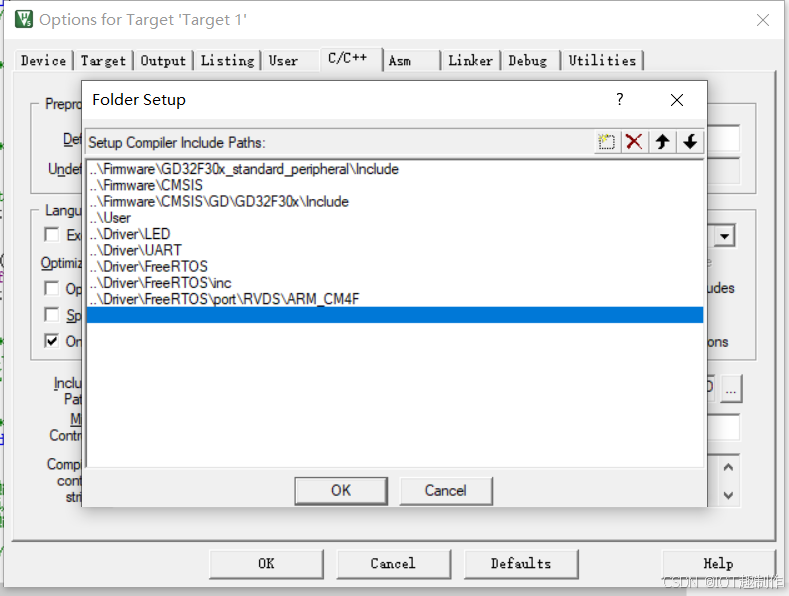
C文件添加完成后把头文件的路径包含进来:
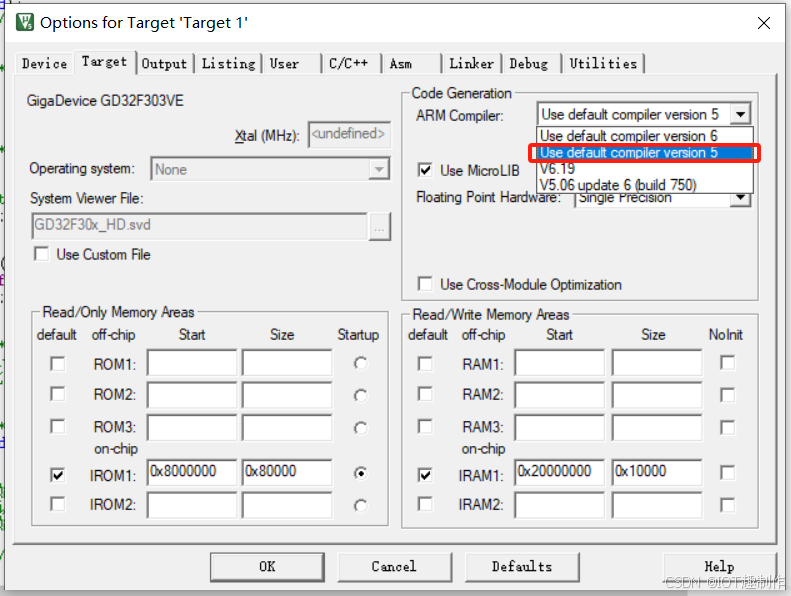
记得编译器使用V5:
接下来就是代码操作部分,完成最后的接口适配工作
3. 代码操作
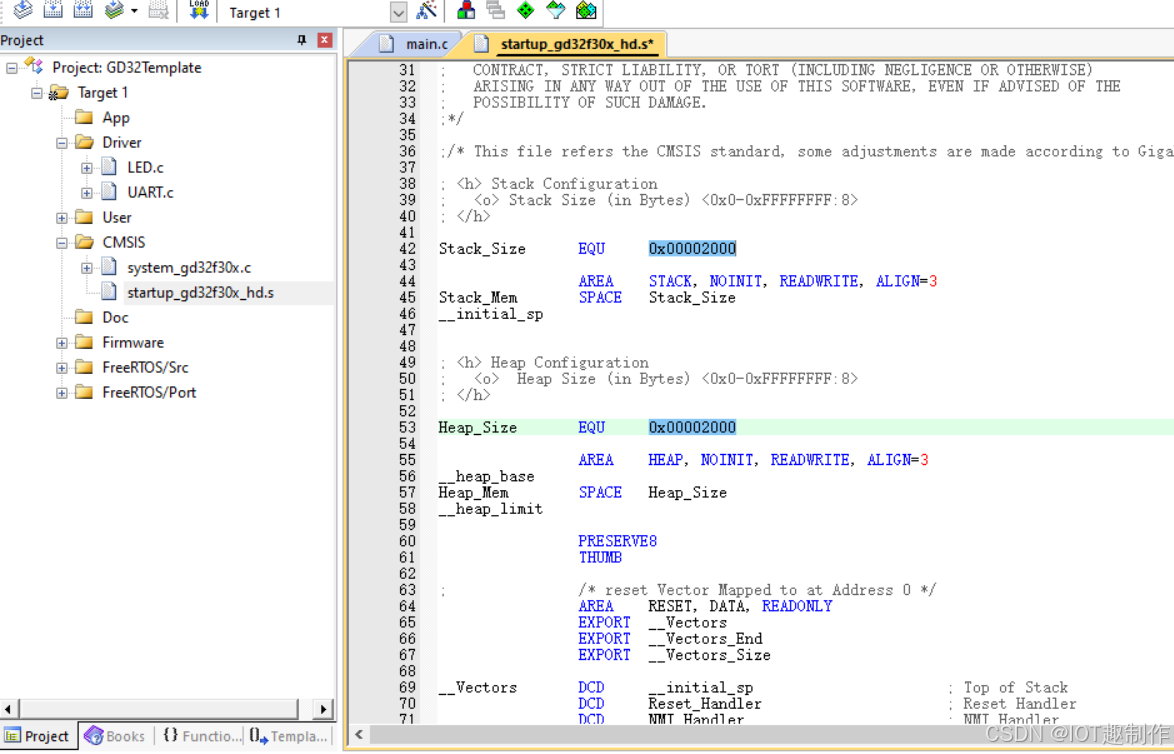
首先调整堆栈大小,打开启动文件”startup_gd32f30x_hd.s“,我使用的GD32F303VET6,64K+512K,堆栈设置为0x2000,大家根据自己的项目需要和MCU能力自由分配:
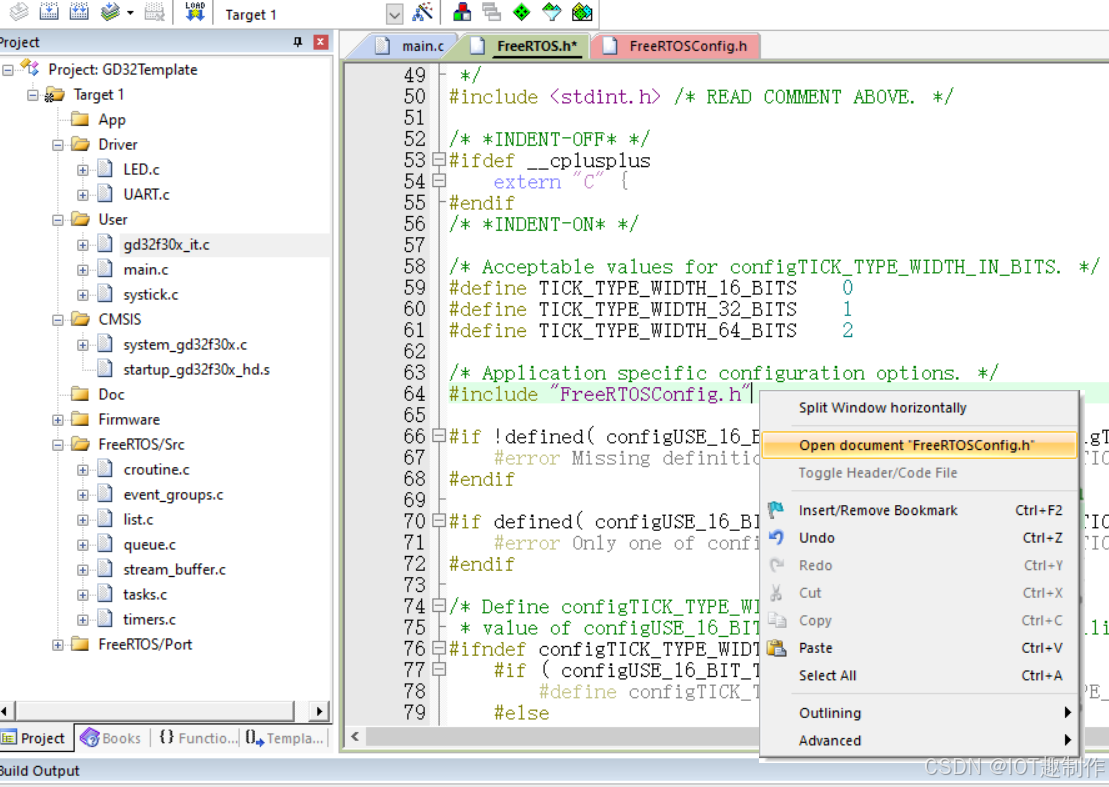
首先先打开载入配置文件,可以在main.c文件中导入“FreeRTOS.h“,然后右键打开h文件:
然后就可以看到引用的“FreeRTOSConfig.h”文件,还是右键打开:
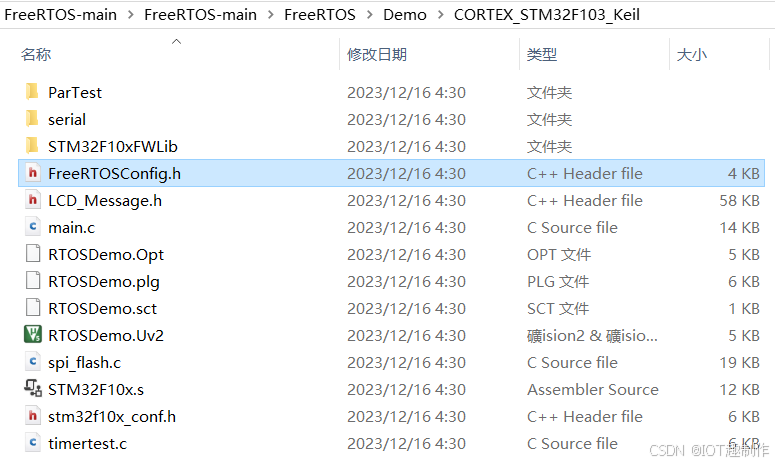
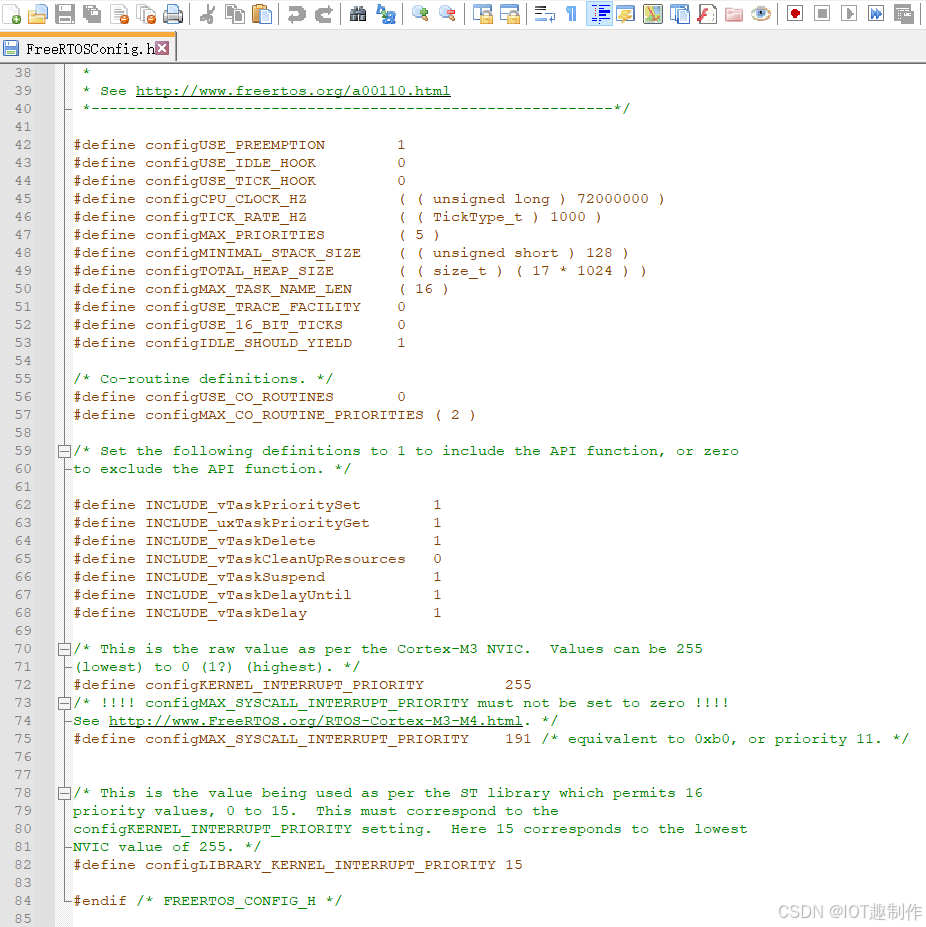
在“FreeRTOSConfig.h”文件中配置freeRTOS,官方模板文件中开启了很多的配置项,对于初学者,大部分我们并不太关心,由于新版本只有模板文件,我们可以直接从老版本中下载一个STM32的Demo配置文件,替换这个模板文件的内容:
/*
* FreeRTOS V202212.00
* Copyright (C) 2020 Amazon.com, Inc. or its affiliates. All Rights Reserved.
*
* Permission is hereby granted, free of charge, to any person obtaining a copy of
* this software and associated documentation files (the "Software"), to deal in
* the Software without restriction, including without limitation the rights to
* use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
* the Software, and to permit persons to whom the Software is furnished to do so,
* subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included in all
* copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
* FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
* COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
* IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
* CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
*
* https://www.FreeRTOS.org
* https://github.com/FreeRTOS
*
*/
#ifndef FREERTOS_CONFIG_H
#define FREERTOS_CONFIG_H
/*-----------------------------------------------------------
* Application specific definitions.
*
* These definitions should be adjusted for your particular hardware and
* application requirements.
*
* THESE PARAMETERS ARE DESCRIBED WITHIN THE 'CONFIGURATION' SECTION OF THE
* FreeRTOS API DOCUMENTATION AVAILABLE ON THE FreeRTOS.org WEB SITE.
*
* See http://www.freertos.org/a00110.html
*----------------------------------------------------------*/
#define configUSE_PREEMPTION 1
#define configUSE_IDLE_HOOK 0
#define configUSE_TICK_HOOK 0
#define configCPU_CLOCK_HZ ( ( unsigned long ) 72000000 )
#define configTICK_RATE_HZ ( ( TickType_t ) 1000 )
#define configMAX_PRIORITIES ( 5 )
#define configMINIMAL_STACK_SIZE ( ( unsigned short ) 128 )
#define configTOTAL_HEAP_SIZE ( ( size_t ) ( 17 * 1024 ) )
#define configMAX_TASK_NAME_LEN ( 16 )
#define configUSE_TRACE_FACILITY 0
#define configUSE_16_BIT_TICKS 0
#define configIDLE_SHOULD_YIELD 1
/* Co-routine definitions. */
#define configUSE_CO_ROUTINES 0
#define configMAX_CO_ROUTINE_PRIORITIES ( 2 )
/* Set the following definitions to 1 to include the API function, or zero
to exclude the API function. */
#define INCLUDE_vTaskPrioritySet 1
#define INCLUDE_uxTaskPriorityGet 1
#define INCLUDE_vTaskDelete 1
#define INCLUDE_vTaskCleanUpResources 0
#define INCLUDE_vTaskSuspend 1
#define INCLUDE_vTaskDelayUntil 1
#define INCLUDE_vTaskDelay 1
/* This is the raw value as per the Cortex-M3 NVIC. Values can be 255
(lowest) to 0 (1?) (highest). */
#define configKERNEL_INTERRUPT_PRIORITY 255
/* !!!! configMAX_SYSCALL_INTERRUPT_PRIORITY must not be set to zero !!!!
See http://www.FreeRTOS.org/RTOS-Cortex-M3-M4.html. */
#define configMAX_SYSCALL_INTERRUPT_PRIORITY 191 /* equivalent to 0xb0, or priority 11. */
/* This is the value being used as per the ST library which permits 16
priority values, 0 to 15. This must correspond to the
configKERNEL_INTERRUPT_PRIORITY setting. Here 15 corresponds to the lowest
NVIC value of 255. */
#define configLIBRARY_KERNEL_INTERRUPT_PRIORITY 15
#endif /* FREERTOS_CONFIG_H */
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
下图的文件就是上面的代码内容,大家可以直接复制上面的代码或者自行下载例如10.4版本的源码,在下述路径找到配置文件:
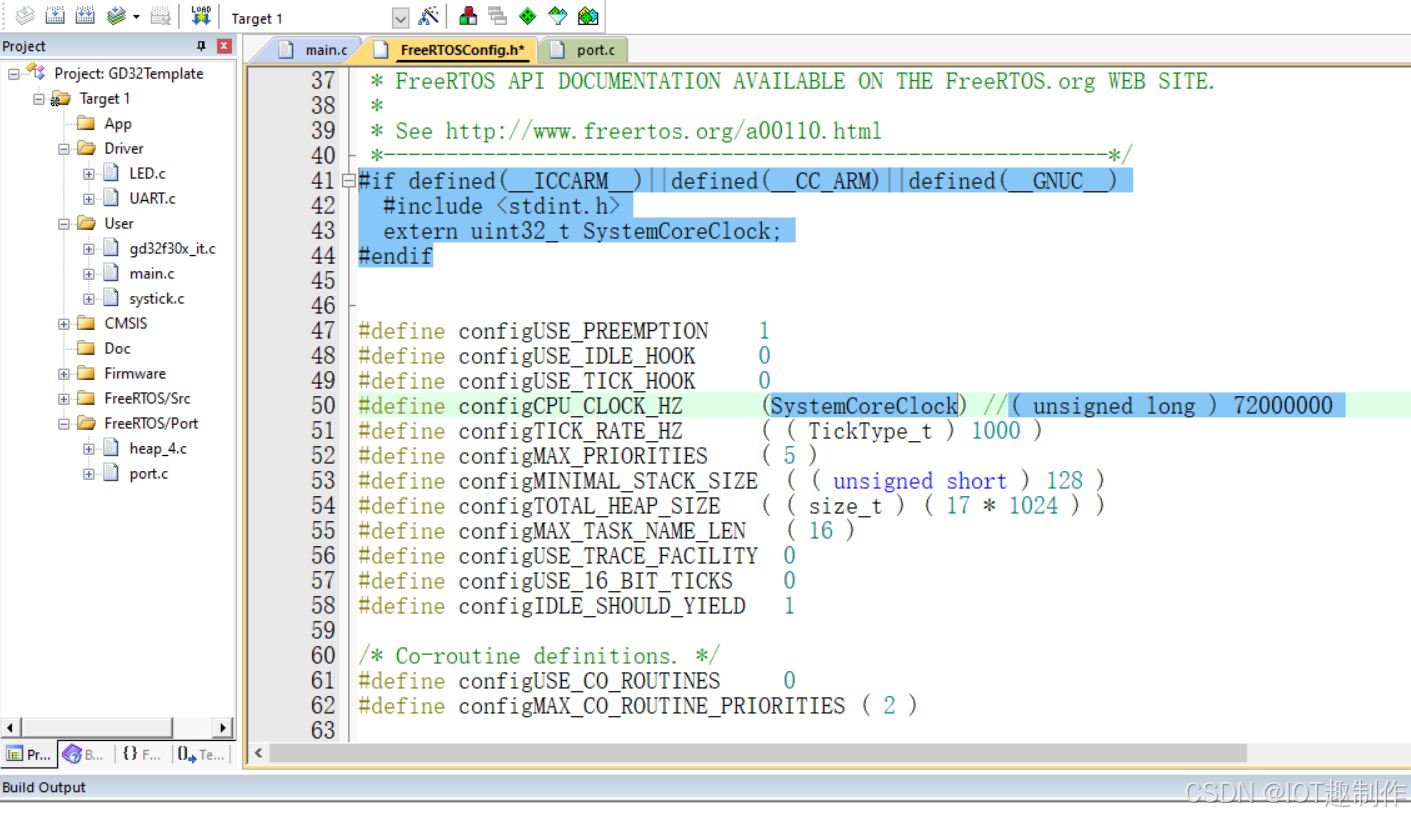
更新配置文件后,首先调整系统时钟,在”FreeRTOSConfig.h“文件中添加如下代码:
#if defined(__ICCARM__)||defined(__CC_ARM)||defined(__GNUC__)
#include - 1
- 2
- 3
- 4
然后配置“configCPU_CLOCK_HZ”为“SystemCoreClock”
#define configCPU_CLOCK_HZ (SystemCoreClock) //( unsigned long ) 72000000
- 1
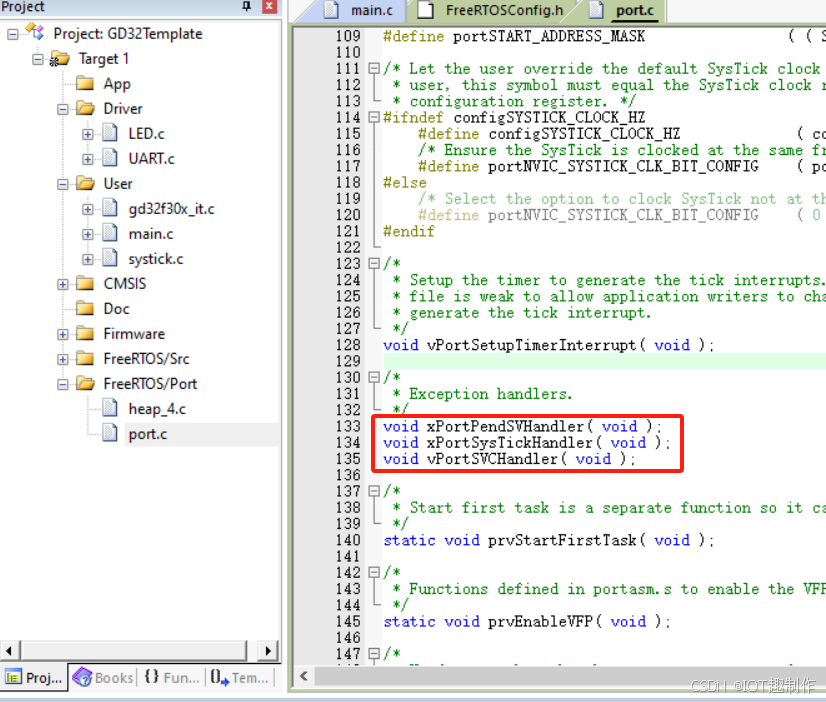
上面文件先不要关闭,我们打开“port.c”文件,主要是适配这三个接口函数:
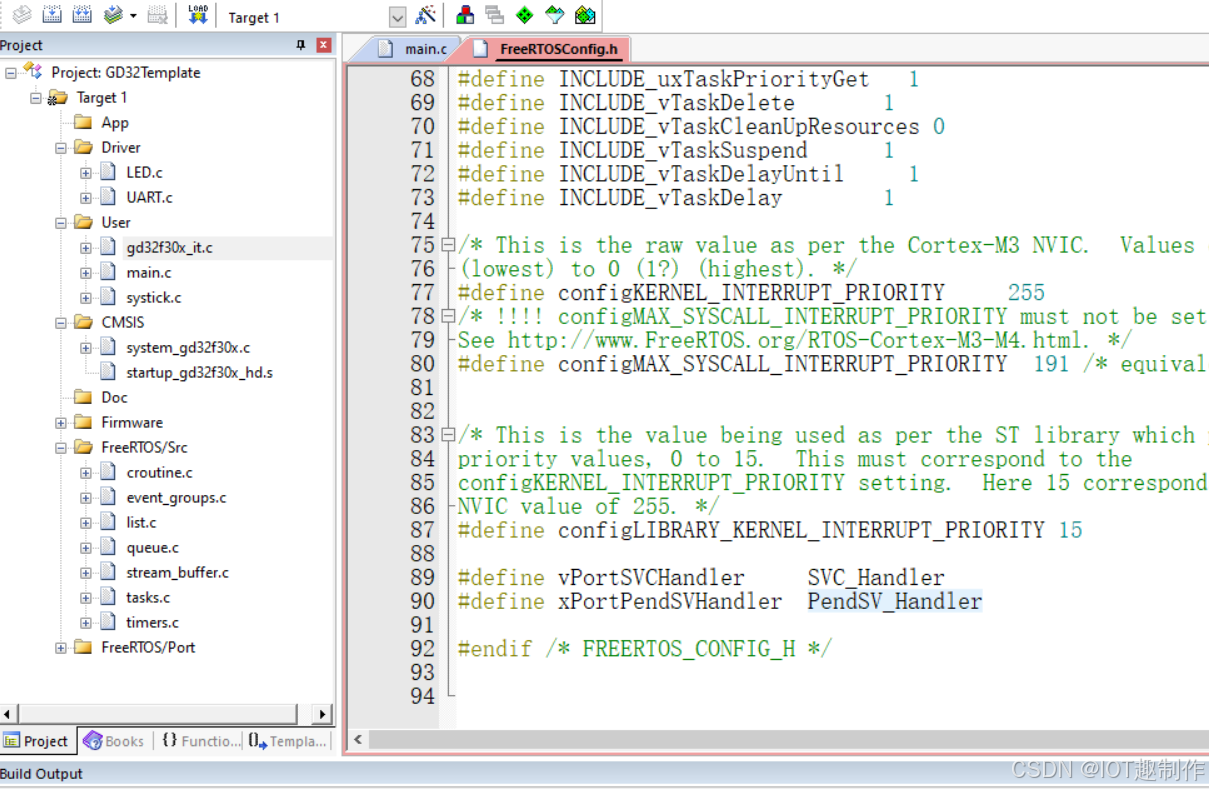
我们在回到“FreeRTOSConfig.h”文件,在最后添加如下宏:
#define vPortSVCHandler SVC_Handler
#define xPortPendSVHandler PendSV_Handler
- 1
- 2
还有一个xPortSysTickHandler函数用于更新系统时基,我们把它放在系统滴答里,打开“gd32f30_it.c”文件,首先添加头文件与函数声明:
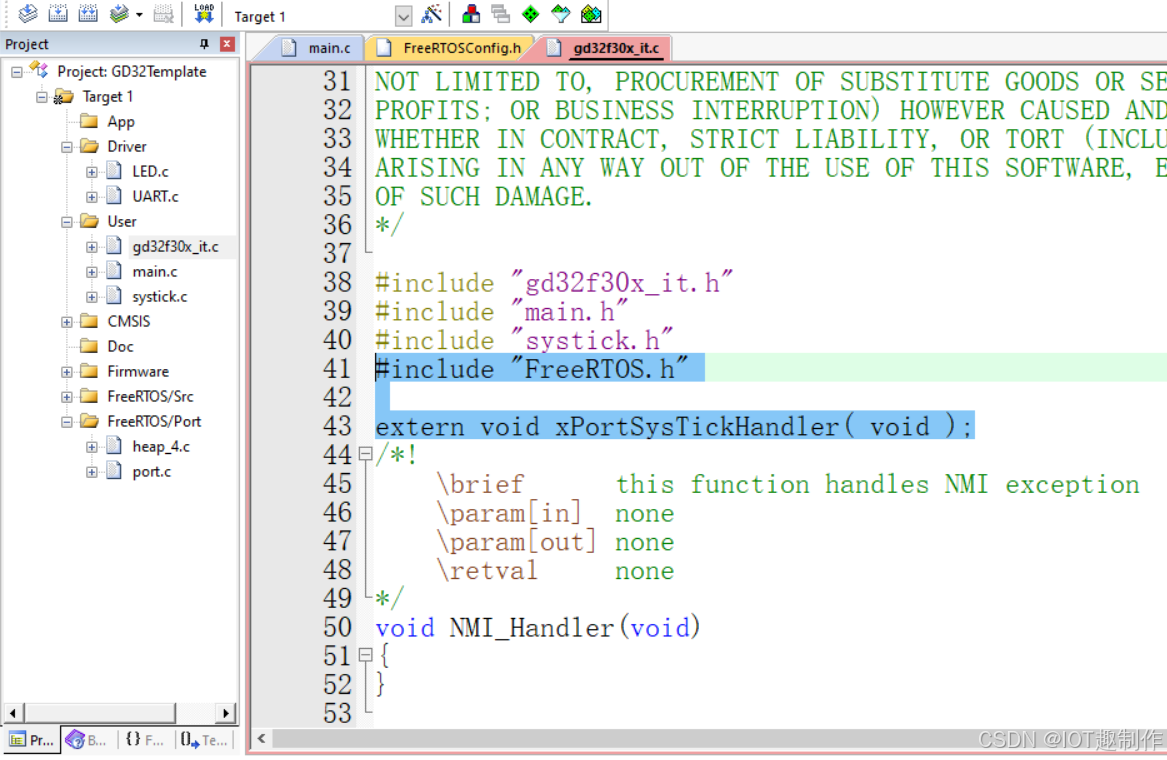
滑到最后,注释掉原有的“SVC_Handler(){}和“PendSV_Handler(){}”函数,这两个已经被上面的宏定义替换了,然后在”SysTick_Handler“中添加
#if (INCLUDE_xTaskGetSchedulerState == 1 )
if (xTaskGetSchedulerState() != taskSCHEDULER_NOT_STARTED)
{
#endif
xPortSysTickHandler();
#if (INCLUDE_xTaskGetSchedulerState == 1 )
}
#endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
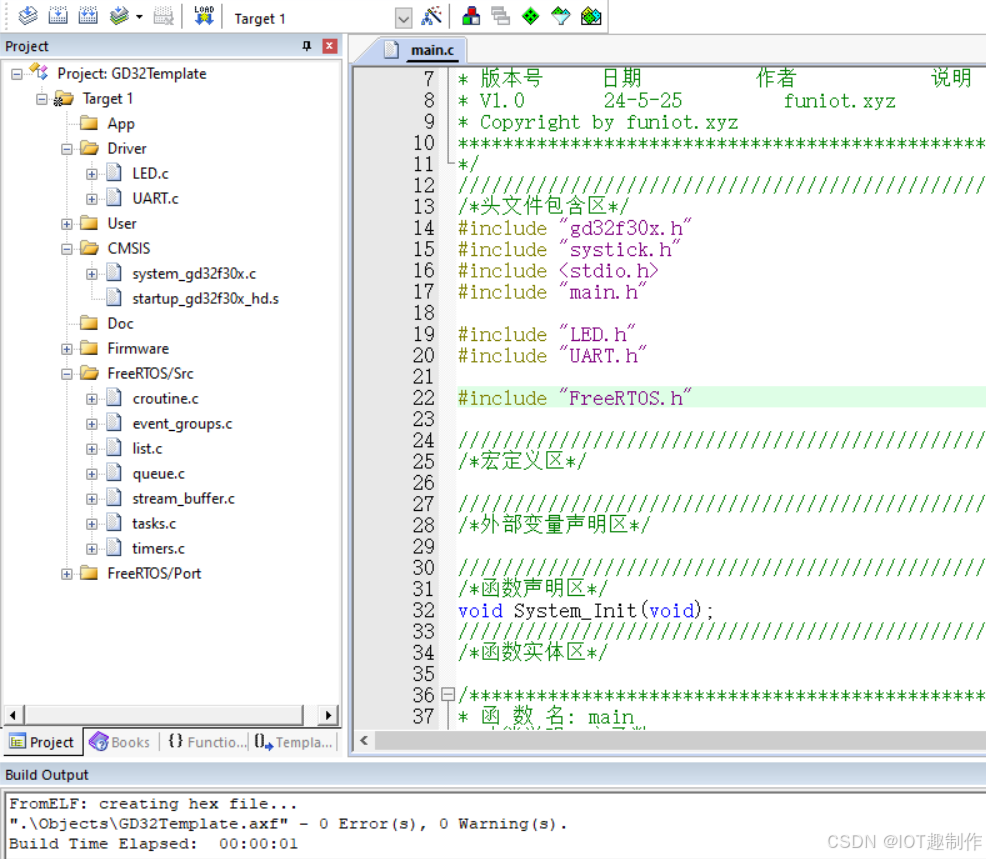
编译运行0警告0错误
三、Hello FreeRTOS
1. 创建任务
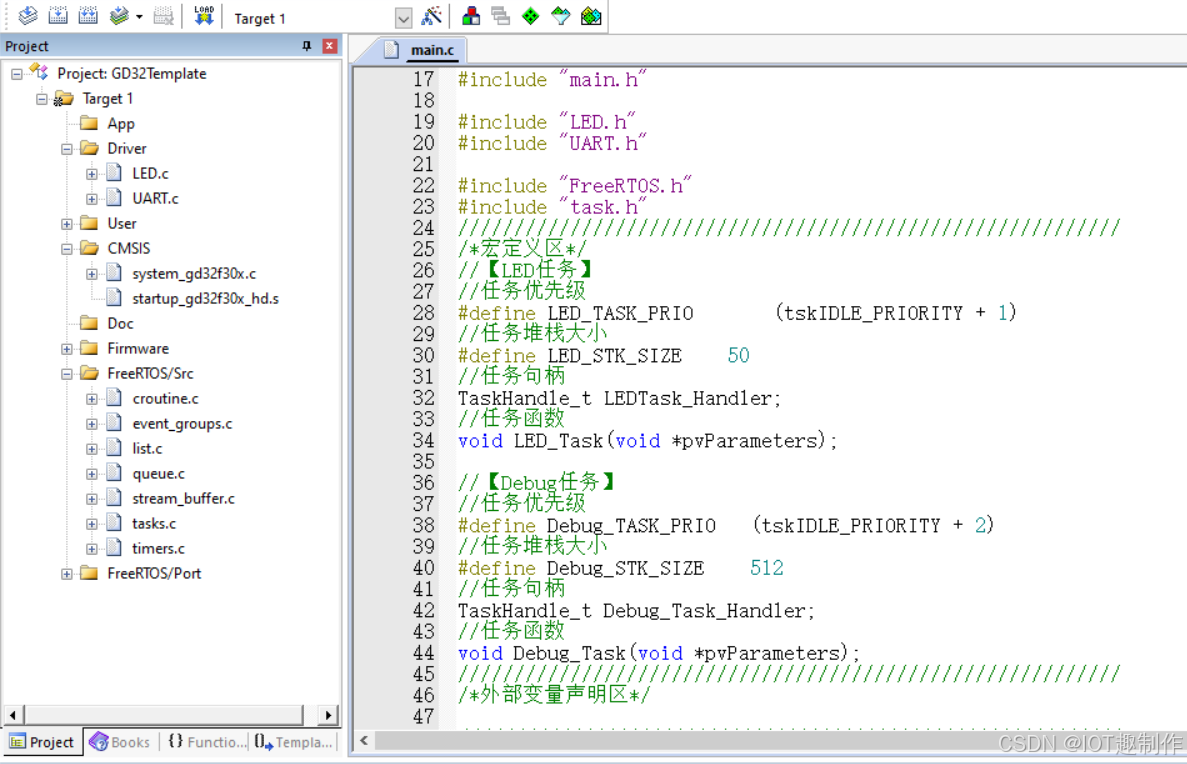
任务相关使用需要包含头文件”task.h“,然后创建两个任务,一个LED灯任务一个打印任务:
//【LED任务】
//任务优先级
#define LED_TASK_PRIO (tskIDLE_PRIORITY + 1)
//任务堆栈大小
#define LED_STK_SIZE 50
//任务句柄
TaskHandle_t LEDTask_Handler;
//任务函数
void LED_Task(void *pvParameters);
//【Debug任务】
//任务优先级
#define Debug_TASK_PRIO (tskIDLE_PRIORITY + 2)
//任务堆栈大小
#define Debug_STK_SIZE 512
//任务句柄
TaskHandle_t Debug_Task_Handler;
//任务函数
void Debug_Task(void *pvParameters);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
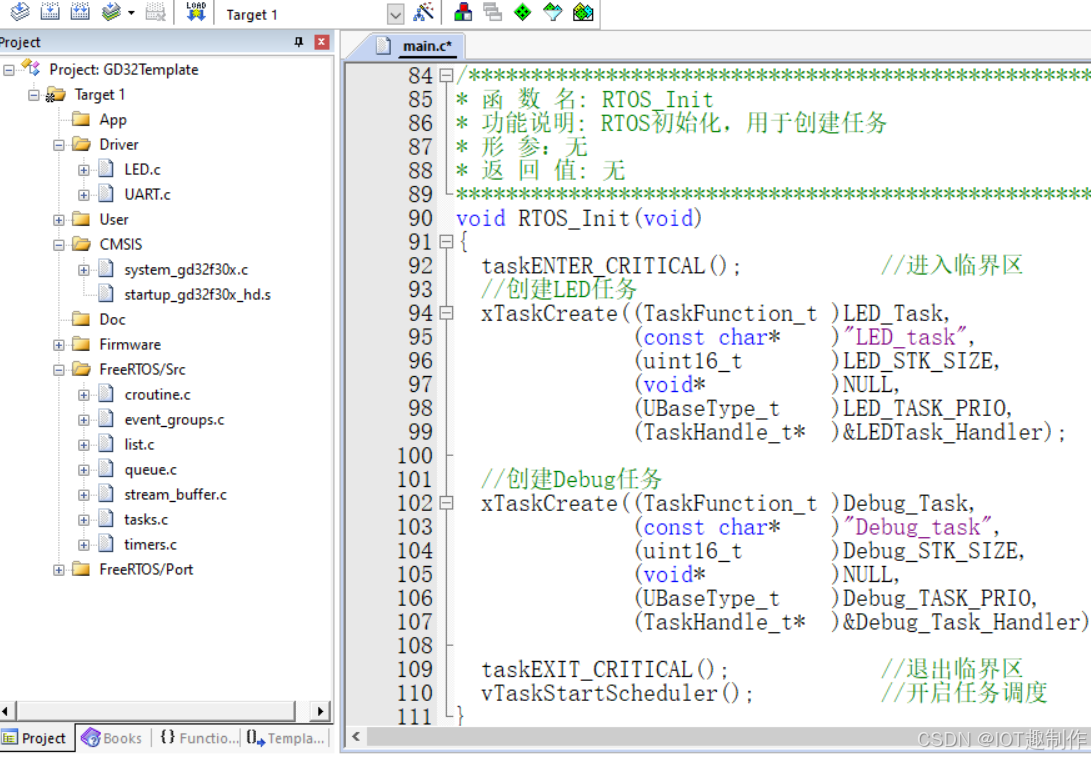
然后定义一个任务创建函数:
/**********************************************************************************************************
* 函 数 名: RTOS_Init
* 功能说明: RTOS初始化,用于创建任务
* 形 参:无
* 返 回 值: 无
**********************************************************************************************************/
void RTOS_Init(void)
{
taskENTER_CRITICAL(); //进入临界区
//创建LED任务
xTaskCreate((TaskFunction_t )LED_Task,
(const char* )"LED_task",
(uint16_t )LED_STK_SIZE,
(void* )NULL,
(UBaseType_t )LED_TASK_PRIO,
(TaskHandle_t* )&LEDTask_Handler);
//创建Debug任务
xTaskCreate((TaskFunction_t )Debug_Task,
(const char* )"Debug_task",
(uint16_t )Debug_STK_SIZE,
(void* )NULL,
(UBaseType_t )Debug_TASK_PRIO,
(TaskHandle_t* )&Debug_Task_Handler);
taskEXIT_CRITICAL(); //退出临界区
vTaskStartScheduler(); //开启任务调度
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
实现两个任务函数:
/**********************************************************************************************************
* 函 数 名: LED_Task
* 功能说明: LED任务
* 形 参: 无
* 返 回 值: 无
**********************************************************************************************************/
void LED_Task(void *pvParameters)
{
while(1)
{
LED_BlinkOnOff();
vTaskDelay(500);
}
}
/**********************************************************************************************************
* 函 数 名: Debug_Task
* 功能说明: Debug任务
* 形 参: 无
* 返 回 值: 无
**********************************************************************************************************/
void Debug_Task(void *pvParameters)
{
while(1)
{
printf("Hello FreeRTOS\r\n");
vTaskDelay(500);
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
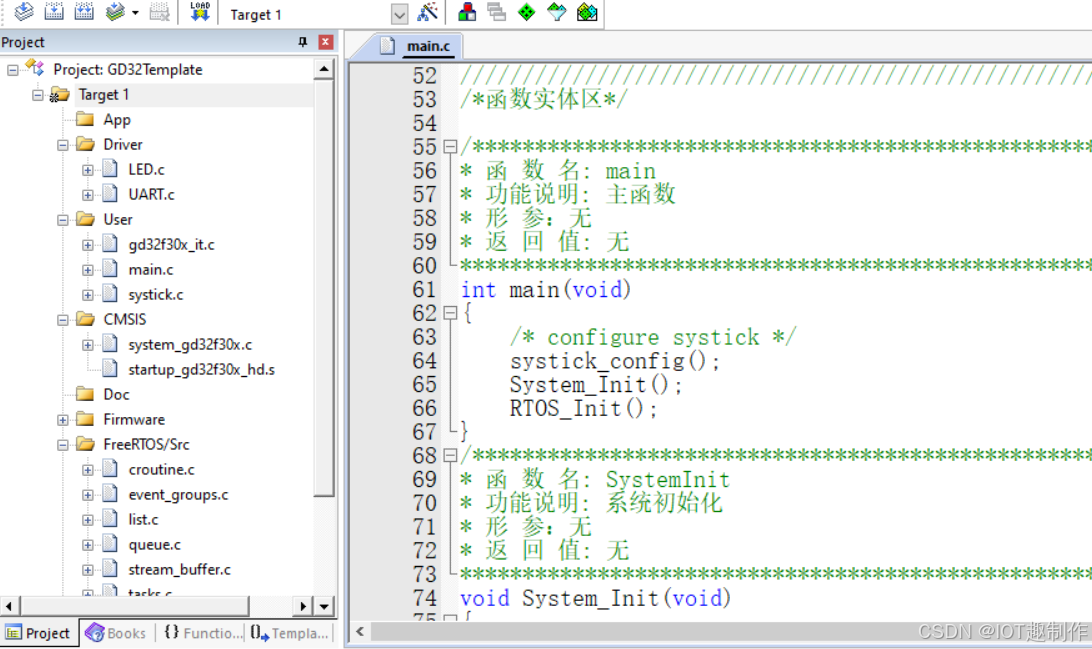
在主函数中完成调用:
int main(void)
{
/* configure systick */
systick_config();
System_Init();
RTOS_Init();
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
2. 编译下载
编译下载即可看到串口打印信息以及LED周期闪烁:
最后附一张资源占用情况:
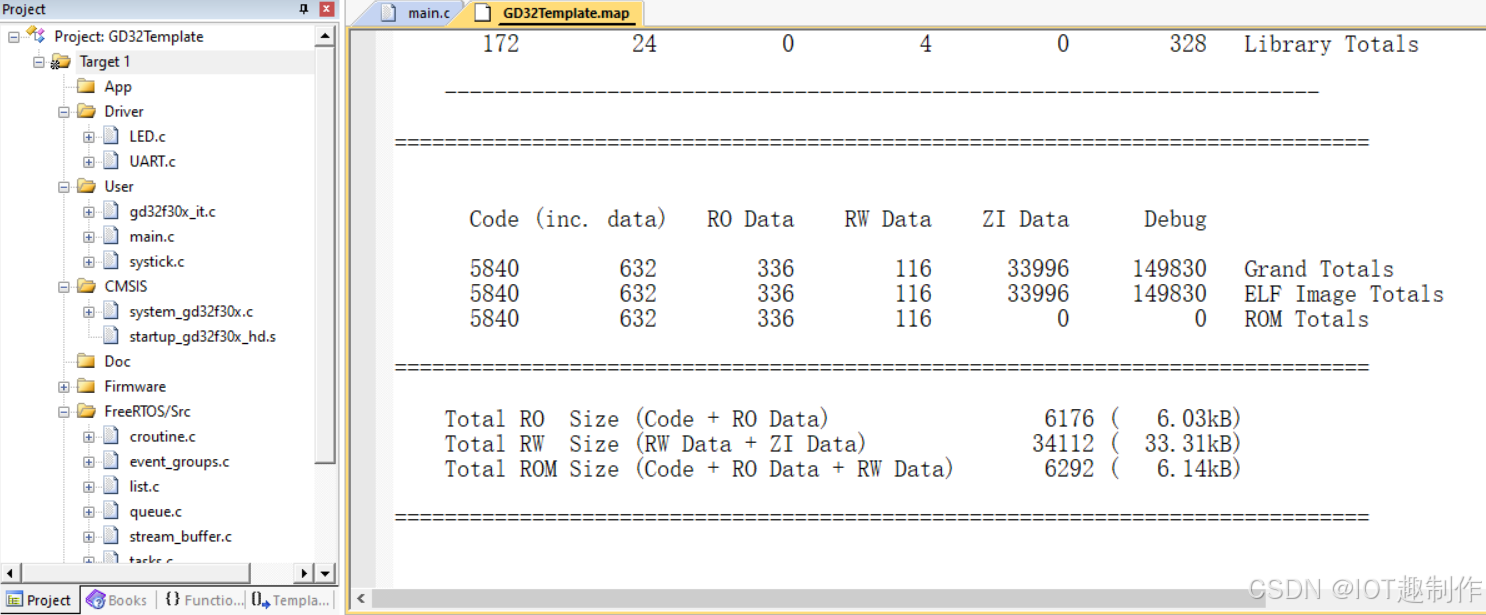
接下来大家就可以嗨皮的学习FreeRTOS的各类组件了,如果大家需要上述工程文件,公众号私信【1023】即可获取本文使用的Demo工程文件。
评论记录:
回复评论: