
RSIS 系列 Rotated Multi-Scale Interaction Network for Referring Remote Sensing Image Segmentation 论文阅读笔记
写在前面
同样是一篇比较新的论文挂在 Arxiv 上面,拿来读一读。看标题应该是提出了新的 RIS 数据集与方法,用于遥感目标检测的。
- 论文地址:Rotated Multi-Scale Interaction Network for Referring Remote Sensing Image Segmentation
- 代码地址:https://github.com/Lsan2401/RMSIN
- 预计提交于:CVPR 2024
- Ps:2023 年每周一篇博文阅读笔记,主页 更多干货,欢迎关注呀,期待 6 千粉丝有你的参与呦~
一、Abstract
首先指出 Referring Remote Sensing Image Segmentation (RRSIS) 指代遥感目标分割的粗略含义,与 RIS 一致,但是需要在航空图像中实现。于是本文引入一种旋转的多尺度交互网络 Rotated Multi-Scale Interaction Network (RMSIN),其整合了一种内部尺度交互模块 Intra-scale Interaction Module (IIM) 来解决多尺度且细粒度的细节信息,以及一种跨尺度交互模块 Cross-scale Interaction Module (CIM) 用于整合这些细节。此外,RMSIN 利用自适应旋转卷积 Adaptive Rotated Convolution (ARC) 考虑那些不同方向的目标。为评估 RMSIN 的性能,建立了一个可拓展的数据集,包含 17420 个“图像-字幕-mask” 三元组。实验效果很好。
二、引言
Referring Remote Sensing Image Segmentation (RRSIS) 的定义,应用。缺陷在于:这一领域数据集尺度有限,且模型精度有限。于是本文引入一种可拓展的数据集,名为 RRSSIS-D,用于提升 RRSIS 任务。此数据集主要利用 Segment Anything Model (SAM) 模型,采用一个半自动化标注流程,因此耗时较短,同时标注精度较高。其设计源于最初的 Bounding box prompts 生成的分割 masks,然后进一步精炼来确保航空图像的高保真度。于是生成了一个包含 17502 个遥感“图像-字幕-masks”三元组。
此外,现有的 RIS 方法在应对遥感图像时效果不咋地。如下图所示:
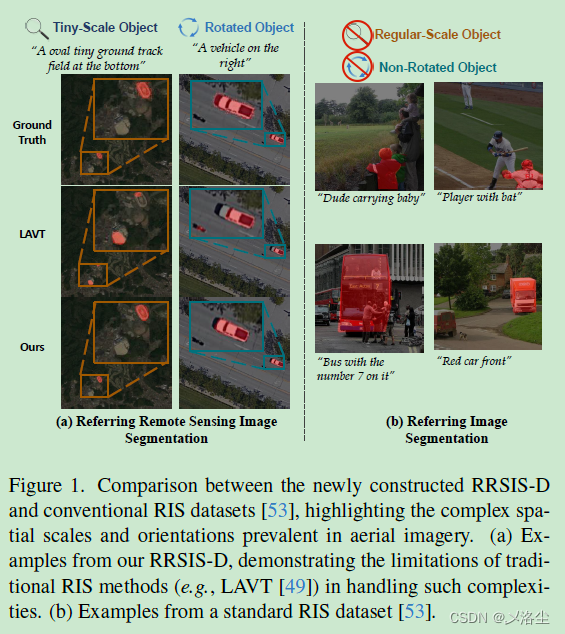
航空图像的挑战在于不仅包含了传统的数据,还有一些尺度多变的图像以及多个方向的图像。当前的 RIS 方法在面对这些航空图像时效果确实不行。
于是本文提出 Rotated Multi-Scale Interaction Network (RMSIN) 用于解决 RRSIS 问题。首先引入了一种尺度内交互模块 Intra-scale Interaction Module (IIM),在单个层内提取出详细的特征信息;引入一种跨尺度交互模块 Cross-scale Interaction Module (CIM) 来促进全面的特征融合。此外,整合一种自适应旋转卷积 Adaptive Rotated Convolution (ARC) 到解码器中,使得模型能够解决目标的旋转问题。本文贡献总结如下:
- 引入 RRSiS-D,一种新的数据集用于指代遥感图像分割 Referring Remote Sensing Image Segmentation (RRSIS)。其利用 SAM 的分割能力再结合手动校准,在目标尺度和方向上有很大变动;
- 提出旋转多尺度交互网络 Rotated Multi-Scale Interaction Network (RMSIN) 用于解决航空图像中多种空间尺度和方向变化的问题;
- 提出 IIM 和 CIM 用于解决不同尺度下的细粒度信息问题,设计了 ARC 用于增强模型对于任意旋转目标的鲁棒性问题;
- 大量的实验表明本文提出的 RMSIN 实现了 SOTA 的性能。
三、相关工作
Referring Image Detection and Segmentation
讲一下 RID 和 RIS 的定义,现有的方法。然而由于航空图像的特殊属性,这些方法很难在遥感领域发挥作用。有一些方法引入了尺度交互模块用于增强特征提取,但是自然图像和航空图像间的语义鸿沟仍然存在,使得性能达不到最优结果。
Remote Sensing Referring Image Detection and Segmentation
RSRID 和 RSRIS 任务比较新,目前研究还很少。而最近基于 Transformer 的方法 RSVG 利用视觉 Transformer 和 BERT 作为 Backbone,整合了多层次跨模态特征学习来解决航空图像中的多尺度变换问题。而 RSRIS 也是处于萌芽期,于是本文提出一种可拓展的、复杂的 RRSIS-D 数据集,以及一种新的模型 RMSIN。
四、RRSIS-D

提出了一个RRSIS-D 数据集,用于RRSIS 任务。上图为数据集中的词云表示。基于 Segment Anything Model (SAM),采用了一种半自动化标注方法,利用 bouding boxes 和 SAM 上生成像素级别的 masks,从而在标注过程节约成本。具体来说,采用下列步骤为语言标注生成逐像素标注:
- 步骤一:利用 SAM 为 RSVGD 数据集中的 Bounding box prompts 生成 masks,然而由于 SAM 可能在精度方面存在变化(主要是航空图像和自然图像存在领域鸿沟导致),于是有了下一步。
- 采取一个手动提炼过程用于那些可能存在问题的航空图像 mask,具体来说,对数据集进行全面检查,鉴别那些有问题的数据,手动标注其 masks。
- RRSIS-D 数据集的标注全部转化为与 RefCOOC 数据集相同的格式。
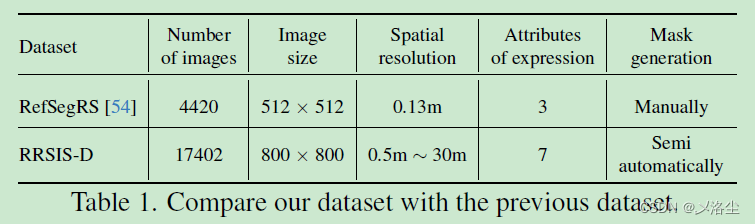
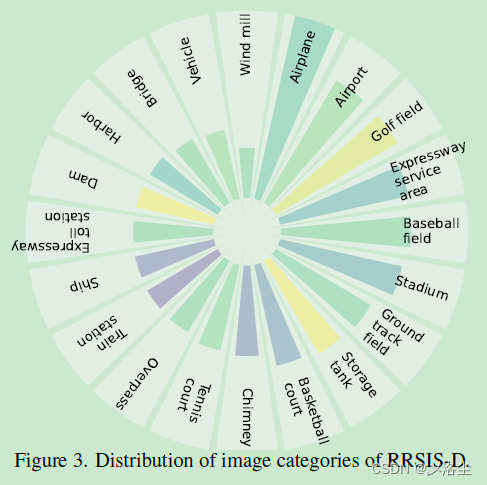
数据集的统计情况如上表所示,类别分布如下图所示:
生成 Maks 的统计情况如下图所示:
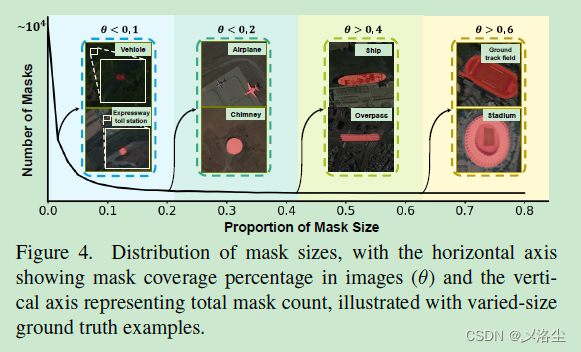
需要注意的是生成的 masks 非常小的比例占据了数据集中的绝大部分。但同时也有一些大像素,例如超过 40 0000 的。
五、RMSIN
5.1 总览
给定输入图像 I ∈ R H × W × 3 I\in \mathbb{R}^{H\times W\times 3} I∈RH×W×3,语言表达式 E = { ω i } , i ∈ { 0 , … , N } E=\{\omega_i\},i\in\{0,\ldots,N\} E={ωi},i∈{0,…,N},其中 H H H 和 W W W 分别表示图像的高、宽。 N N N 为表达式的长度。输入表达式通过 backbone f l f_l fl 转化到特征空间 F l ∈ R N × C F_l\in \mathbb{R}^{N\times C} Fl∈RN×C。
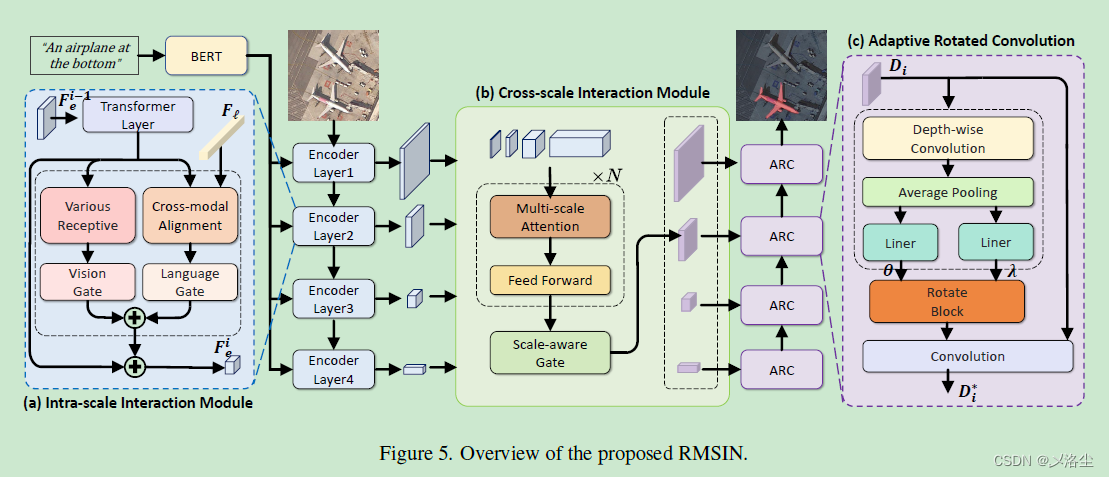
接下来是复合的尺度交互编码器 Compounded Scale Interaction Encoder (CSIE),其由一个尺度内交互模块 Intra-scale Interaction Module (IIM) 和跨尺度交互模块 Cross-scale Interaction Module (CIM) 组成,用于在不同阶段生成融合的特征。最后,基于方向感知解码器 Oriented-Aware Decoder (OAD),提出一种自适应旋转卷积 Adaptive Rotated Convolution (ARC) 生成 masks。
5.2 Compounded Scale Interaction Encoder (CSIE)
给定语言特征 F l F_l Fl 和输入的图像 I ∈ R H × W × 3 I\in \mathbb{R}^{H\times W\times 3} I∈RH×W×3,复合的尺度交互编码器 Compounded Scale Interaction Encoder (CSIE) 以多阶段的方式在内部和外部视角进行视觉语言的跨模态融合。CSIE 由两个组成部分:尺度内交互模块 Intra-scale Interaction Module (IIM) 和跨尺度交互模块 Cross-scale Interaction Module (CIM)。
5.2.1 尺度内交互模块
CSIE 内每个阶段的第一部分,即尺度内交互模块 Intra-scale Interaction Module (IIM) 用于提取每个尺度下的信息,并促进视觉语言模态的交互。根据级联的 4 个阶段,IIM 可以表示为
{
ϕ
i
}
i
∈
{
1
,
2
,
3
,
4
}
\{\phi_i\}_{i\in\{1,2,3,4\}}
{ϕi}i∈{1,2,3,4}。通过文本 Backbone 得到语言特征
F
l
∈
R
N
×
C
F_l\in \mathbb{R}^{N\times C}
Fl∈RN×C,其中
C
C
C 表示通道的数量,IIM 每个阶段的输出特征
F
e
i
F_e^{i}
Fei可表示为:
F
e
i
=
ϕ
i
(
F
e
i
−
1
,
F
ℓ
)
F_{e}^{i}=\phi_{i}(F_{e}^{i-1},F_{\ell})
Fei=ϕi(Fei−1,Fℓ)其中
F
e
0
F_e^0
Fe0 利用视觉 Backbone
f
v
f_v
fv 和输入
I
I
I 得到。具体来说,在阶段
i
i
i 中,输入的特征
F
e
i
−
1
F^{i-1}_e
Fei−1 经过一个下采样和 MLP 减少其尺度,并统一其维度到特征
F
^
e
i
−
1
\hat F^{i-1}_e
F^ei−1。然后
F
^
e
i
−
1
\hat F^{i-1}_e
F^ei−1 送入到两个分支中用于增强视觉先验以及融合跨模态信息。
各种感知分支
特征
F
^
e
i
−
1
\hat F^{i-1}_e
F^ei−1 送入到多个不同卷积核大小的分支,生成不同感受野大小的特征图:
ω
i
=
σ
(
∑
j
=
0
J
(
1
C
∑
C
k
j
i
∗
F
^
e
i
−
1
)
)
\omega^i=\sigma\left(\sum_{j=0}^J\left(\frac1C\sum^Ck_j^i*\hat{F}_e^{i-1}\right)\right)
ωi=σ(j=0∑J(C1∑Ckji∗F^ei−1))其中
k
j
i
k_j^i
kji 表示第
j
j
j 个卷积分支,
σ
\sigma
σ 为 Sigmoid 函数。
ω
i
∈
(
0
,
1
)
H
×
W
\omega^i\in {(0,1)}^{H \times W}
ωi∈(0,1)H×W 为平衡不同分支的权重:
F
^
e
1
i
−
1
=
ω
i
⊗
F
^
e
i
−
1
\hat{F}_{e1}^{i-1}=\omega^i\otimes\hat{F}_{e}^{i-1}
F^e1i−1=ωi⊗F^ei−1
此外,其输出通过一个视觉门进行归一化,添加在原始图像特征上作为局部细节信息的补充。这一过程实施如下:
α
=
T
a
n
h
(
L
N
(
R
e
L
U
(
L
N
(
F
^
e
1
i
−
1
)
)
)
)
\alpha=\mathrm{Tanh}(\mathrm{LN}(\mathrm{ReLU}(\mathrm{LN}(\hat{F}_{e1}^{i-1}))))
α=Tanh(LN(ReLU(LN(F^e1i−1))))其中
L
N
(
⋅
)
\mathrm{LN}(\cdot)
LN(⋅) 表示一个
1
×
1
1\times1
1×1 卷积,
T
a
n
h
(
⋅
)
\mathrm{Tanh}(\cdot)
Tanh(⋅) 和
R
e
L
U
(
⋅
)
\mathrm{ReLU}(\cdot)
ReLU(⋅) 表示激活函数。
跨模态对齐分支
输入为
F
^
e
i
−
1
\hat F^{i-1}_e
F^ei−1 和语言特征
F
l
F_l
Fl,这一模块首先应用尺度点乘注意力,
F
^
e
i
−
1
\hat F^{i-1}_e
F^ei−1 作为 query,
F
l
F_l
Fl 为 key 和 value 得到多模态特征:
A
i
=
attention
(
F
^
e
i
−
1
W
q
i
,
F
ℓ
W
k
i
,
F
ℓ
W
v
i
)
A^i=\text{attention}(\hat{F}_e^{i-1}W_q^i,F_\ell W_k^i,F_\ell W_v^i)
Ai=attention(F^ei−1Wqi,FℓWki,FℓWvi)其中
W
q
i
W_q^i
Wqi、
W
k
i
W_k^i
Wki、
W
v
i
W_v^i
Wvi 为线性投影矩阵。接下来,注意力
A
i
A^i
Ai 联合
F
^
e
i
−
1
\hat{F}_e^{i-1}
F^ei−1 一起得到语言引导的图像特征:
F
^
e
2
i
−
1
=
P
r
o
j
(
A
i
W
w
i
⊗
F
^
e
i
−
1
W
m
i
)
\hat{F}_{e2}^{i-1}=\mathrm{Proj}(A^iW_w^i\otimes\hat{F}_e^{i-1}W_m^i)
F^e2i−1=Proj(AiWwi⊗F^ei−1Wmi)其中
W
w
i
W_w^i
Wwi、
W
m
i
W_m^i
Wmi 为投影矩阵,
⊗
\otimes
⊗ 表示逐元素乘法。得到的结果通过
1
×
1
1\times1
1×1 卷积
Proj
(
⋅
)
\text{Proj}(\cdot)
Proj(⋅) 产生最终的输出。
与其它在输出
F
^
e
i
−
1
\hat{F}_e^{i-1}
F^ei−1 上执行的操作类似,其结果通过共享的语言门
β
\beta
β 来归一化。而视觉门同样添加到原始图像特征上,补充语言特征。于是 IIM 在阶段
i
i
i 的整体输出特征表示如下:
F
e
i
=
F
^
e
i
−
1
+
α
F
^
e
1
i
−
1
+
β
F
^
e
2
i
−
1
F_{e}^i=\hat{F}_{e}^{i-1}+\alpha\hat{F}_{e1}^{i-1}+\beta\hat{F}_{e2}^{i-1}
Fei=F^ei−1+αF^e1i−1+βF^e2i−1
5.2.2 跨尺度交互模块
IIM 充分提取出由语言特征引导的多尺度定位信息,此外设计了一种跨尺度交互模块 Cross-scale Interaction Module (CIM),进一步增强粗糙和细腻阶段的特征交互。具体来说,模块收集 IIM 每个阶段的输出,即 F e i , i ∈ { 1 , 2 , 3 , 4 } F_e^{i},i\in\{1,2,3,4\} Fei,i∈{1,2,3,4},执行多阶段交互。
多尺度特征组合
输入为特征
F
e
i
,
i
∈
{
1
,
2
,
3
,
4
}
F_e^{i},i\in\{1,2,3,4\}
Fei,i∈{1,2,3,4},下采样到同一尺寸后沿着通道维度进行拼接:
F
d
i
=
downsample
(
F
e
i
)
i
∈
{
1
,
2
,
3
,
4
}
,
F
c
∗
=
concat
(
F
d
1
,
F
d
2
,
F
d
3
,
F
e
4
)
多尺度注意力层
设计不同的感受野用于拼接后的特征
F
c
∗
F_c^*
Fc∗,从而实现多尺度交互。
F
c
∗
F_c^*
Fc∗ 在不同的深度卷积核的作用下调整为不同的尺度:
F
c
m
=
concat
c
(
k
m
∗
F
c
∗
)
W
m
h
m
=
⌊
h
−
1
m
+
1
⌋
,
w
m
=
⌊
w
−
1
m
+
1
⌋
F
~
c
∗
=
s
o
f
t
m
a
x
(
F
c
∗
W
q
⋅
F
^
c
∗
W
k
T
C
)
⋅
F
^
c
∗
W
v
\tilde{F}_{c}^{*}=\mathrm{softmax}(\frac{F_{c}^{*}W_{q}\cdot\hat{F}_{c}^{*}W_{k}^{T}}{\sqrt{C}})\cdot\hat{F}_{c}^{*}W_{v}
F~c∗=softmax(CFc∗Wq⋅F^c∗WkT)⋅F^c∗Wv接下来采用局部关系表示,称之为 LRC 的模块,归一化多尺注意力的输出。于是,多尺度注意力层的最终输出表示为:
F
c
=
F
~
c
∗
+
DWConv
(
Hardswish
(
F
c
∗
)
)
F_c=\widetilde{F}_c^*+\text{DWConv}(\text{Hardswish}(F_c^*))
Fc=F
c∗+DWConv(Hardswish(Fc∗))其中
DWConv
(
⋅
)
\text{DWConv}(\cdot)
DWConv(⋅) 表示深度卷积,
Hardswish
(
⋅
)
\text{Hardswish}(\cdot)
Hardswish(⋅) 为激活函数,旨在增强多尺度局部信息。
之后将 F c F_c Fc 划分为 4 个部分,通过上采样恢复到 F e i F_e^i Fei 的原始尺寸后送入尺度感知门,从而得到最终的输出。
尺度感知门
对于
F
c
F_c
Fc 中每个部分,从
F
e
F_e
Fe 中取出对应的部分,从而衡量跨尺度交互的权重。这一权重以辅助残差的方式叠加在 IIM 特征之上,表示如下:
F
o
i
=
sigmoid
(
F
e
i
W
1
)
⊗
F
c
i
W
2
+
F
e
i
W
3
F_o^i=\text{sigmoid}(F_e^iW_1)\otimes F_c^iW_2+F_e^iW_3
Foi=sigmoid(FeiW1)⊗FciW2+FeiW3其中
i
∈
{
1
,
2
,
3
,
4
}
i\in\{1,2,3,4\}
i∈{1,2,3,4}。尺度感知门的输出用于下一解码器,从而生成最终的 mask 预测。
5.3 方向感知解码器
来自 CSIE 的特征集合 { F o i ∣ i ∈ { 1 , 2 , 3 , 4 } } \{F_o^i|i\in\{1,2,3,4\}\} {Foi∣i∈{1,2,3,4}} 用于生成 mask。将自适应旋转卷积 Adaptive Rotated Convolution (ARC) 整合进分割解码器用于 RRSIS 任务。
5.3.1 自适应旋转卷积
首先提取方向特征,基于输入来预测
n
n
n 个角度。对于输入
X
X
X,预测
θ
\theta
θ 和
λ
\lambda
λ 如下:
θ
,
λ
=
Routing
(
X
)
\theta,\lambda=\operatorname{Routing}(X)
θ,λ=Routing(X)其中 Routing 块的结构如下图所示:
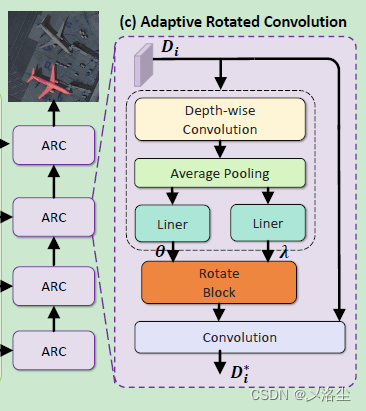
其中静态卷积核权重可以视为从 2 维核空间采样出的点。因此卷积的方向选择为旋转重采样的过程。具体来说,卷积核
W
i
W_i
Wi 根据预测的角度重参数化为:
Y
i
′
=
M
−
1
(
θ
i
)
Y
i
W
i
′
=
i
n
t
e
r
p
o
l
a
t
i
o
n
(
W
i
,
Y
i
′
)
X
∗
=
X
∗
∑
i
=
1
n
λ
i
W
i
′
X^*=X*\sum_{i=1}^n\lambda_iW_i^{'}
X∗=X∗i=1∑nλiWi′
Mask 预测的整体自顶向下过程描述如下:
D
4
=
F
o
4
D
i
=
S
e
g
(
A
R
C
(
[
D
i
+
1
;
F
o
i
]
)
)
,
i
∈
{
1
,
2
,
3
}
D
0
=
P
r
o
j
(
D
1
)
六、实验
6.1 实施细节
实验设置
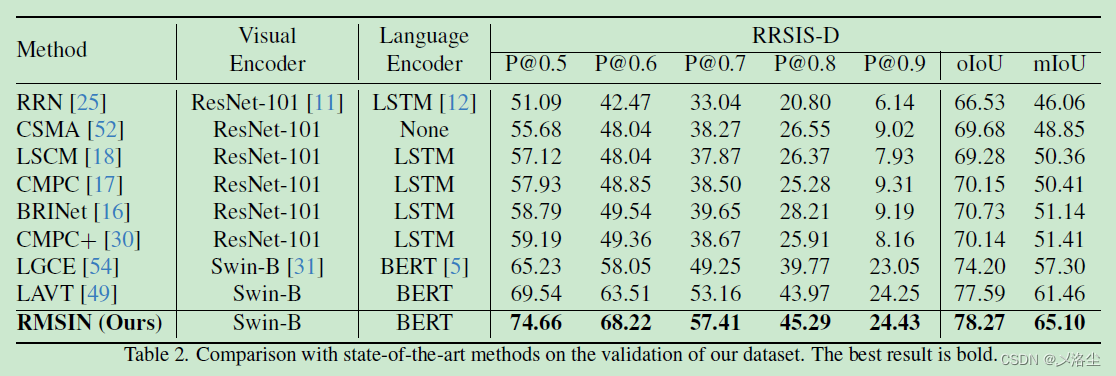
视觉 Backbone 采用 Swin Transformer,预训练在 ImageNet22K 上,语言 Backbone 采用 BERT 模型。训练 40 个 epochs,AdamW 优化器,权重衰减 0.01,初始学习率 5 e − 4 5e-4 5e−4,根据 polynomial 衰减。输入图像尺寸 480 × 480 480\times480 480×480。
指标
Overall Intersection-over-Union (oIoU)、Mean Intersection-over-Union (mIoU)、Precision@X (P@X)。
6.2 与 SOTA 的 RIS 方法比较
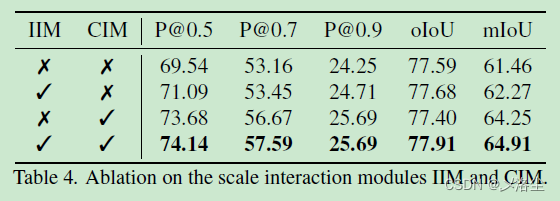
6.3 消融研究
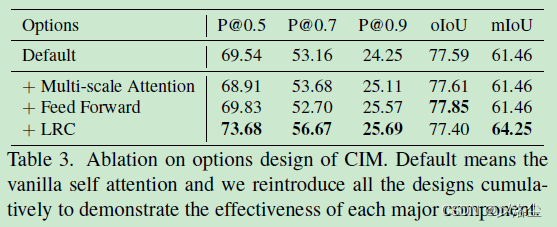
IIM 和 CIM 的有效性
CIM 的深度设计
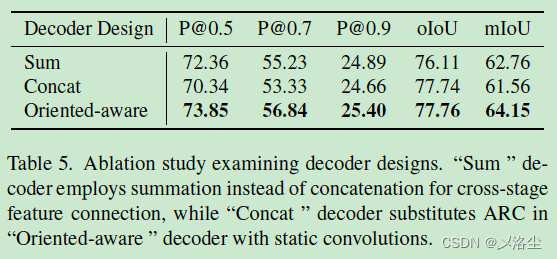
解码器的设计
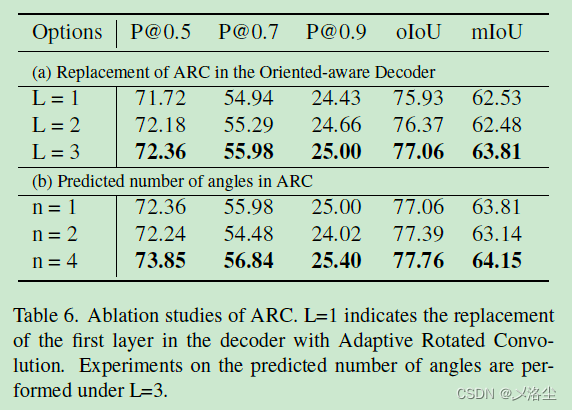
ARC 的设计
6.4 可视化
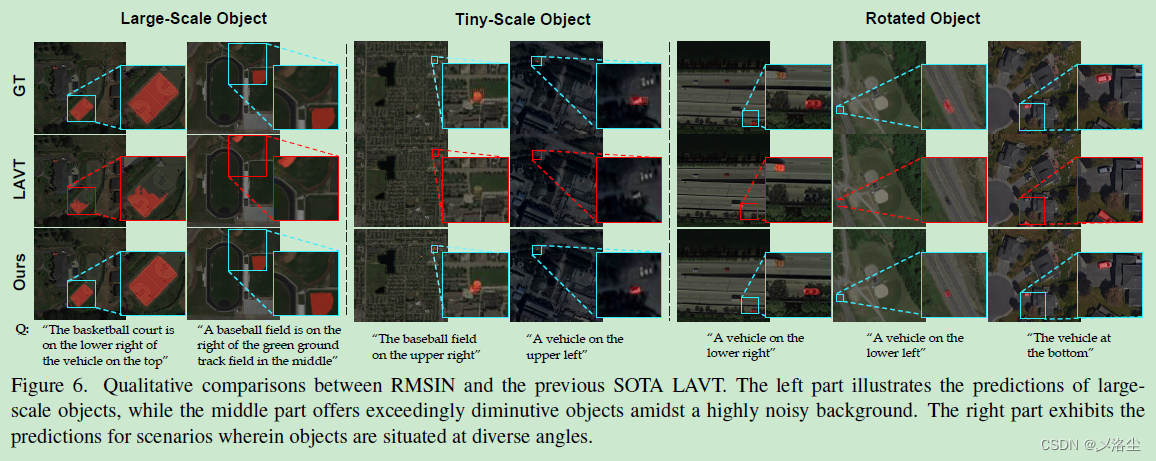
6.4.1 定量分析
6.4.2 编码器特征可视化
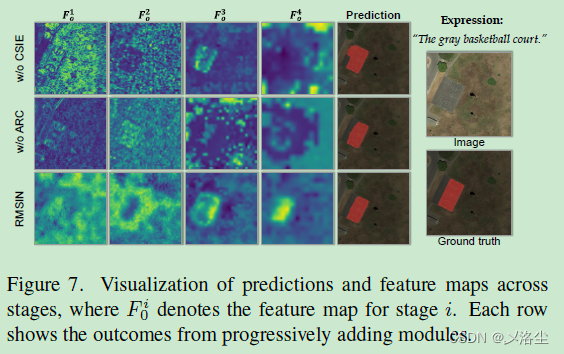
七、结论
本文引入一个旋转多尺度交互网络 Rotated Multi-Scale Interaction Network (RMSIN),用于解决 RRSIS 中复杂的空间尺度和方向问题。尺度内交互模块 Intra-scale Interaction Module 和 RMSIN 中的跨尺度交互模块 Cross-scale Interaction Module 解决了航空图像中不同空间尺度的问题。此外,自适应旋转卷积的引入解决了航空图像中不同的方向分布问题。在 RRSIS-D 数据集上的实验表明 RMSIN 的方法达到了 SOTA 的性能。
写在后面
这篇论文工作量其实蛮大的,比上一篇好很多。这个论文应该稳中,但是评分的话也不是那么顶高。毕竟涉及到了多个模块的组合。还是要吐槽下论文的写作,咋说呢,感觉不是那么完美。
 微信公众号
微信公众号

RSIS 系列 Rotated Multi-Scale Interaction Network for Referring Remote Sensing Image Segmentation 论文阅读笔记
写在前面
同样是一篇比较新的论文挂在 Arxiv 上面,拿来读一读。看标题应该是提出了新的 RIS 数据集与方法,用于遥感目标检测的。
- 论文地址:Rotated Multi-Scale Interaction Network for Referring Remote Sensing Image Segmentation
- 代码地址:https://github.com/Lsan2401/RMSIN
- 预计提交于:CVPR 2024
- Ps:2023 年每周一篇博文阅读笔记,主页 更多干货,欢迎关注呀,期待 6 千粉丝有你的参与呦~
一、Abstract
首先指出 Referring Remote Sensing Image Segmentation (RRSIS) 指代遥感目标分割的粗略含义,与 RIS 一致,但是需要在航空图像中实现。于是本文引入一种旋转的多尺度交互网络 Rotated Multi-Scale Interaction Network (RMSIN),其整合了一种内部尺度交互模块 Intra-scale Interaction Module (IIM) 来解决多尺度且细粒度的细节信息,以及一种跨尺度交互模块 Cross-scale Interaction Module (CIM) 用于整合这些细节。此外,RMSIN 利用自适应旋转卷积 Adaptive Rotated Convolution (ARC) 考虑那些不同方向的目标。为评估 RMSIN 的性能,建立了一个可拓展的数据集,包含 17420 个“图像-字幕-mask” 三元组。实验效果很好。
二、引言
Referring Remote Sensing Image Segmentation (RRSIS) 的定义,应用。缺陷在于:这一领域数据集尺度有限,且模型精度有限。于是本文引入一种可拓展的数据集,名为 RRSSIS-D,用于提升 RRSIS 任务。此数据集主要利用 Segment Anything Model (SAM) 模型,采用一个半自动化标注流程,因此耗时较短,同时标注精度较高。其设计源于最初的 Bounding box prompts 生成的分割 masks,然后进一步精炼来确保航空图像的高保真度。于是生成了一个包含 17502 个遥感“图像-字幕-masks”三元组。
此外,现有的 RIS 方法在应对遥感图像时效果不咋地。如下图所示:
航空图像的挑战在于不仅包含了传统的数据,还有一些尺度多变的图像以及多个方向的图像。当前的 RIS 方法在面对这些航空图像时效果确实不行。
于是本文提出 Rotated Multi-Scale Interaction Network (RMSIN) 用于解决 RRSIS 问题。首先引入了一种尺度内交互模块 Intra-scale Interaction Module (IIM),在单个层内提取出详细的特征信息;引入一种跨尺度交互模块 Cross-scale Interaction Module (CIM) 来促进全面的特征融合。此外,整合一种自适应旋转卷积 Adaptive Rotated Convolution (ARC) 到解码器中,使得模型能够解决目标的旋转问题。本文贡献总结如下:
- 引入 RRSiS-D,一种新的数据集用于指代遥感图像分割 Referring Remote Sensing Image Segmentation (RRSIS)。其利用 SAM 的分割能力再结合手动校准,在目标尺度和方向上有很大变动;
- 提出旋转多尺度交互网络 Rotated Multi-Scale Interaction Network (RMSIN) 用于解决航空图像中多种空间尺度和方向变化的问题;
- 提出 IIM 和 CIM 用于解决不同尺度下的细粒度信息问题,设计了 ARC 用于增强模型对于任意旋转目标的鲁棒性问题;
- 大量的实验表明本文提出的 RMSIN 实现了 SOTA 的性能。
三、相关工作
Referring Image Detection and Segmentation
讲一下 RID 和 RIS 的定义,现有的方法。然而由于航空图像的特殊属性,这些方法很难在遥感领域发挥作用。有一些方法引入了尺度交互模块用于增强特征提取,但是自然图像和航空图像间的语义鸿沟仍然存在,使得性能达不到最优结果。
Remote Sensing Referring Image Detection and Segmentation
RSRID 和 RSRIS 任务比较新,目前研究还很少。而最近基于 Transformer 的方法 RSVG 利用视觉 Transformer 和 BERT 作为 Backbone,整合了多层次跨模态特征学习来解决航空图像中的多尺度变换问题。而 RSRIS 也是处于萌芽期,于是本文提出一种可拓展的、复杂的 RRSIS-D 数据集,以及一种新的模型 RMSIN。
四、RRSIS-D
提出了一个RRSIS-D 数据集,用于RRSIS 任务。上图为数据集中的词云表示。基于 Segment Anything Model (SAM),采用了一种半自动化标注方法,利用 bouding boxes 和 SAM 上生成像素级别的 masks,从而在标注过程节约成本。具体来说,采用下列步骤为语言标注生成逐像素标注:
- 步骤一:利用 SAM 为 RSVGD 数据集中的 Bounding box prompts 生成 masks,然而由于 SAM 可能在精度方面存在变化(主要是航空图像和自然图像存在领域鸿沟导致),于是有了下一步。
- 采取一个手动提炼过程用于那些可能存在问题的航空图像 mask,具体来说,对数据集进行全面检查,鉴别那些有问题的数据,手动标注其 masks。
- RRSIS-D 数据集的标注全部转化为与 RefCOOC 数据集相同的格式。
数据集的统计情况如上表所示,类别分布如下图所示:
生成 Maks 的统计情况如下图所示:
需要注意的是生成的 masks 非常小的比例占据了数据集中的绝大部分。但同时也有一些大像素,例如超过 40 0000 的。
五、RMSIN
5.1 总览
给定输入图像 I ∈ R H × W × 3 I\in \mathbb{R}^{H\times W\times 3} I∈RH×W×3,语言表达式 E = { ω i } , i ∈ { 0 , … , N } E=\{\omega_i\},i\in\{0,\ldots,N\} E={ωi},i∈{0,…,N},其中 H H H 和 W W W 分别表示图像的高、宽。 N N N 为表达式的长度。输入表达式通过 backbone f l f_l fl 转化到特征空间 F l ∈ R N × C F_l\in \mathbb{R}^{N\times C} Fl∈RN×C。
接下来是复合的尺度交互编码器 Compounded Scale Interaction Encoder (CSIE),其由一个尺度内交互模块 Intra-scale Interaction Module (IIM) 和跨尺度交互模块 Cross-scale Interaction Module (CIM) 组成,用于在不同阶段生成融合的特征。最后,基于方向感知解码器 Oriented-Aware Decoder (OAD),提出一种自适应旋转卷积 Adaptive Rotated Convolution (ARC) 生成 masks。
5.2 Compounded Scale Interaction Encoder (CSIE)
给定语言特征 F l F_l Fl 和输入的图像 I ∈ R H × W × 3 I\in \mathbb{R}^{H\times W\times 3} I∈RH×W×3,复合的尺度交互编码器 Compounded Scale Interaction Encoder (CSIE) 以多阶段的方式在内部和外部视角进行视觉语言的跨模态融合。CSIE 由两个组成部分:尺度内交互模块 Intra-scale Interaction Module (IIM) 和跨尺度交互模块 Cross-scale Interaction Module (CIM)。
5.2.1 尺度内交互模块
CSIE 内每个阶段的第一部分,即尺度内交互模块 Intra-scale Interaction Module (IIM) 用于提取每个尺度下的信息,并促进视觉语言模态的交互。根据级联的 4 个阶段,IIM 可以表示为
{
ϕ
i
}
i
∈
{
1
,
2
,
3
,
4
}
\{\phi_i\}_{i\in\{1,2,3,4\}}
{ϕi}i∈{1,2,3,4}。通过文本 Backbone 得到语言特征
F
l
∈
R
N
×
C
F_l\in \mathbb{R}^{N\times C}
Fl∈RN×C,其中
C
C
C 表示通道的数量,IIM 每个阶段的输出特征
F
e
i
F_e^{i}
Fei可表示为:
F
e
i
=
ϕ
i
(
F
e
i
−
1
,
F
ℓ
)
F_{e}^{i}=\phi_{i}(F_{e}^{i-1},F_{\ell})
Fei=ϕi(Fei−1,Fℓ)其中
F
e
0
F_e^0
Fe0 利用视觉 Backbone
f
v
f_v
fv 和输入
I
I
I 得到。具体来说,在阶段
i
i
i 中,输入的特征
F
e
i
−
1
F^{i-1}_e
Fei−1 经过一个下采样和 MLP 减少其尺度,并统一其维度到特征
F
^
e
i
−
1
\hat F^{i-1}_e
F^ei−1。然后
F
^
e
i
−
1
\hat F^{i-1}_e
F^ei−1 送入到两个分支中用于增强视觉先验以及融合跨模态信息。
各种感知分支
特征
F
^
e
i
−
1
\hat F^{i-1}_e
F^ei−1 送入到多个不同卷积核大小的分支,生成不同感受野大小的特征图:
ω
i
=
σ
(
∑
j
=
0
J
(
1
C
∑
C
k
j
i
∗
F
^
e
i
−
1
)
)
\omega^i=\sigma\left(\sum_{j=0}^J\left(\frac1C\sum^Ck_j^i*\hat{F}_e^{i-1}\right)\right)
ωi=σ(j=0∑J(C1∑Ckji∗F^ei−1))其中
k
j
i
k_j^i
kji 表示第
j
j
j 个卷积分支,
σ
\sigma
σ 为 Sigmoid 函数。
ω
i
∈
(
0
,
1
)
H
×
W
\omega^i\in {(0,1)}^{H \times W}
ωi∈(0,1)H×W 为平衡不同分支的权重:
F
^
e
1
i
−
1
=
ω
i
⊗
F
^
e
i
−
1
\hat{F}_{e1}^{i-1}=\omega^i\otimes\hat{F}_{e}^{i-1}
F^e1i−1=ωi⊗F^ei−1
此外,其输出通过一个视觉门进行归一化,添加在原始图像特征上作为局部细节信息的补充。这一过程实施如下:
α
=
T
a
n
h
(
L
N
(
R
e
L
U
(
L
N
(
F
^
e
1
i
−
1
)
)
)
)
\alpha=\mathrm{Tanh}(\mathrm{LN}(\mathrm{ReLU}(\mathrm{LN}(\hat{F}_{e1}^{i-1}))))
α=Tanh(LN(ReLU(LN(F^e1i−1))))其中
L
N
(
⋅
)
\mathrm{LN}(\cdot)
LN(⋅) 表示一个
1
×
1
1\times1
1×1 卷积,
T
a
n
h
(
⋅
)
\mathrm{Tanh}(\cdot)
Tanh(⋅) 和
R
e
L
U
(
⋅
)
\mathrm{ReLU}(\cdot)
ReLU(⋅) 表示激活函数。
跨模态对齐分支
输入为
F
^
e
i
−
1
\hat F^{i-1}_e
F^ei−1 和语言特征
F
l
F_l
Fl,这一模块首先应用尺度点乘注意力,
F
^
e
i
−
1
\hat F^{i-1}_e
F^ei−1 作为 query,
F
l
F_l
Fl 为 key 和 value 得到多模态特征:
A
i
=
attention
(
F
^
e
i
−
1
W
q
i
,
F
ℓ
W
k
i
,
F
ℓ
W
v
i
)
A^i=\text{attention}(\hat{F}_e^{i-1}W_q^i,F_\ell W_k^i,F_\ell W_v^i)
Ai=attention(F^ei−1Wqi,FℓWki,FℓWvi)其中
W
q
i
W_q^i
Wqi、
W
k
i
W_k^i
Wki、
W
v
i
W_v^i
Wvi 为线性投影矩阵。接下来,注意力
A
i
A^i
Ai 联合
F
^
e
i
−
1
\hat{F}_e^{i-1}
F^ei−1 一起得到语言引导的图像特征:
F
^
e
2
i
−
1
=
P
r
o
j
(
A
i
W
w
i
⊗
F
^
e
i
−
1
W
m
i
)
\hat{F}_{e2}^{i-1}=\mathrm{Proj}(A^iW_w^i\otimes\hat{F}_e^{i-1}W_m^i)
F^e2i−1=Proj(AiWwi⊗F^ei−1Wmi)其中
W
w
i
W_w^i
Wwi、
W
m
i
W_m^i
Wmi 为投影矩阵,
⊗
\otimes
⊗ 表示逐元素乘法。得到的结果通过
1
×
1
1\times1
1×1 卷积
Proj
(
⋅
)
\text{Proj}(\cdot)
Proj(⋅) 产生最终的输出。
与其它在输出
F
^
e
i
−
1
\hat{F}_e^{i-1}
F^ei−1 上执行的操作类似,其结果通过共享的语言门
β
\beta
β 来归一化。而视觉门同样添加到原始图像特征上,补充语言特征。于是 IIM 在阶段
i
i
i 的整体输出特征表示如下:
F
e
i
=
F
^
e
i
−
1
+
α
F
^
e
1
i
−
1
+
β
F
^
e
2
i
−
1
F_{e}^i=\hat{F}_{e}^{i-1}+\alpha\hat{F}_{e1}^{i-1}+\beta\hat{F}_{e2}^{i-1}
Fei=F^ei−1+αF^e1i−1+βF^e2i−1
5.2.2 跨尺度交互模块
IIM 充分提取出由语言特征引导的多尺度定位信息,此外设计了一种跨尺度交互模块 Cross-scale Interaction Module (CIM),进一步增强粗糙和细腻阶段的特征交互。具体来说,模块收集 IIM 每个阶段的输出,即 F e i , i ∈ { 1 , 2 , 3 , 4 } F_e^{i},i\in\{1,2,3,4\} Fei,i∈{1,2,3,4},执行多阶段交互。
多尺度特征组合
输入为特征
F
e
i
,
i
∈
{
1
,
2
,
3
,
4
}
F_e^{i},i\in\{1,2,3,4\}
Fei,i∈{1,2,3,4},下采样到同一尺寸后沿着通道维度进行拼接:
F
d
i
=
downsample
(
F
e
i
)
i
∈
{
1
,
2
,
3
,
4
}
,
F
c
∗
=
concat
(
F
d
1
,
F
d
2
,
F
d
3
,
F
e
4
)
多尺度注意力层
设计不同的感受野用于拼接后的特征
F
c
∗
F_c^*
Fc∗,从而实现多尺度交互。
F
c
∗
F_c^*
Fc∗ 在不同的深度卷积核的作用下调整为不同的尺度:
F
c
m
=
concat
c
(
k
m
∗
F
c
∗
)
W
m
h
m
=
⌊
h
−
1
m
+
1
⌋
,
w
m
=
⌊
w
−
1
m
+
1
⌋
F
~
c
∗
=
s
o
f
t
m
a
x
(
F
c
∗
W
q
⋅
F
^
c
∗
W
k
T
C
)
⋅
F
^
c
∗
W
v
\tilde{F}_{c}^{*}=\mathrm{softmax}(\frac{F_{c}^{*}W_{q}\cdot\hat{F}_{c}^{*}W_{k}^{T}}{\sqrt{C}})\cdot\hat{F}_{c}^{*}W_{v}
F~c∗=softmax(CFc∗Wq⋅F^c∗WkT)⋅F^c∗Wv接下来采用局部关系表示,称之为 LRC 的模块,归一化多尺注意力的输出。于是,多尺度注意力层的最终输出表示为:
F
c
=
F
~
c
∗
+
DWConv
(
Hardswish
(
F
c
∗
)
)
F_c=\widetilde{F}_c^*+\text{DWConv}(\text{Hardswish}(F_c^*))
Fc=F
c∗+DWConv(Hardswish(Fc∗))其中
DWConv
(
⋅
)
\text{DWConv}(\cdot)
DWConv(⋅) 表示深度卷积,
Hardswish
(
⋅
)
\text{Hardswish}(\cdot)
Hardswish(⋅) 为激活函数,旨在增强多尺度局部信息。
之后将 F c F_c Fc 划分为 4 个部分,通过上采样恢复到 F e i F_e^i Fei 的原始尺寸后送入尺度感知门,从而得到最终的输出。
尺度感知门
对于
F
c
F_c
Fc 中每个部分,从
F
e
F_e
Fe 中取出对应的部分,从而衡量跨尺度交互的权重。这一权重以辅助残差的方式叠加在 IIM 特征之上,表示如下:
F
o
i
=
sigmoid
(
F
e
i
W
1
)
⊗
F
c
i
W
2
+
F
e
i
W
3
F_o^i=\text{sigmoid}(F_e^iW_1)\otimes F_c^iW_2+F_e^iW_3
Foi=sigmoid(FeiW1)⊗FciW2+FeiW3其中
i
∈
{
1
,
2
,
3
,
4
}
i\in\{1,2,3,4\}
i∈{1,2,3,4}。尺度感知门的输出用于下一解码器,从而生成最终的 mask 预测。
5.3 方向感知解码器
来自 CSIE 的特征集合 { F o i ∣ i ∈ { 1 , 2 , 3 , 4 } } \{F_o^i|i\in\{1,2,3,4\}\} {Foi∣i∈{1,2,3,4}} 用于生成 mask。将自适应旋转卷积 Adaptive Rotated Convolution (ARC) 整合进分割解码器用于 RRSIS 任务。
5.3.1 自适应旋转卷积
首先提取方向特征,基于输入来预测
n
n
n 个角度。对于输入
X
X
X,预测
θ
\theta
θ 和
λ
\lambda
λ 如下:
θ
,
λ
=
Routing
(
X
)
\theta,\lambda=\operatorname{Routing}(X)
θ,λ=Routing(X)其中 Routing 块的结构如下图所示:
其中静态卷积核权重可以视为从 2 维核空间采样出的点。因此卷积的方向选择为旋转重采样的过程。具体来说,卷积核
W
i
W_i
Wi 根据预测的角度重参数化为:
Y
i
′
=
M
−
1
(
θ
i
)
Y
i
W
i
′
=
i
n
t
e
r
p
o
l
a
t
i
o
n
(
W
i
,
Y
i
′
)
X
∗
=
X
∗
∑
i
=
1
n
λ
i
W
i
′
X^*=X*\sum_{i=1}^n\lambda_iW_i^{'}
X∗=X∗i=1∑nλiWi′
Mask 预测的整体自顶向下过程描述如下:
D
4
=
F
o
4
D
i
=
S
e
g
(
A
R
C
(
[
D
i
+
1
;
F
o
i
]
)
)
,
i
∈
{
1
,
2
,
3
}
D
0
=
P
r
o
j
(
D
1
)
六、实验
6.1 实施细节
实验设置
视觉 Backbone 采用 Swin Transformer,预训练在 ImageNet22K 上,语言 Backbone 采用 BERT 模型。训练 40 个 epochs,AdamW 优化器,权重衰减 0.01,初始学习率 5 e − 4 5e-4 5e−4,根据 polynomial 衰减。输入图像尺寸 480 × 480 480\times480 480×480。
指标
Overall Intersection-over-Union (oIoU)、Mean Intersection-over-Union (mIoU)、Precision@X (P@X)。
6.2 与 SOTA 的 RIS 方法比较
6.3 消融研究
IIM 和 CIM 的有效性
CIM 的深度设计
解码器的设计
ARC 的设计
6.4 可视化
6.4.1 定量分析
6.4.2 编码器特征可视化
七、结论
本文引入一个旋转多尺度交互网络 Rotated Multi-Scale Interaction Network (RMSIN),用于解决 RRSIS 中复杂的空间尺度和方向问题。尺度内交互模块 Intra-scale Interaction Module 和 RMSIN 中的跨尺度交互模块 Cross-scale Interaction Module 解决了航空图像中不同空间尺度的问题。此外,自适应旋转卷积的引入解决了航空图像中不同的方向分布问题。在 RRSIS-D 数据集上的实验表明 RMSIN 的方法达到了 SOTA 的性能。
写在后面
这篇论文工作量其实蛮大的,比上一篇好很多。这个论文应该稳中,但是评分的话也不是那么顶高。毕竟涉及到了多个模块的组合。还是要吐槽下论文的写作,咋说呢,感觉不是那么完美。
微信公众号
评论记录:
回复评论: