
一、四旋翼无人机飞行原理
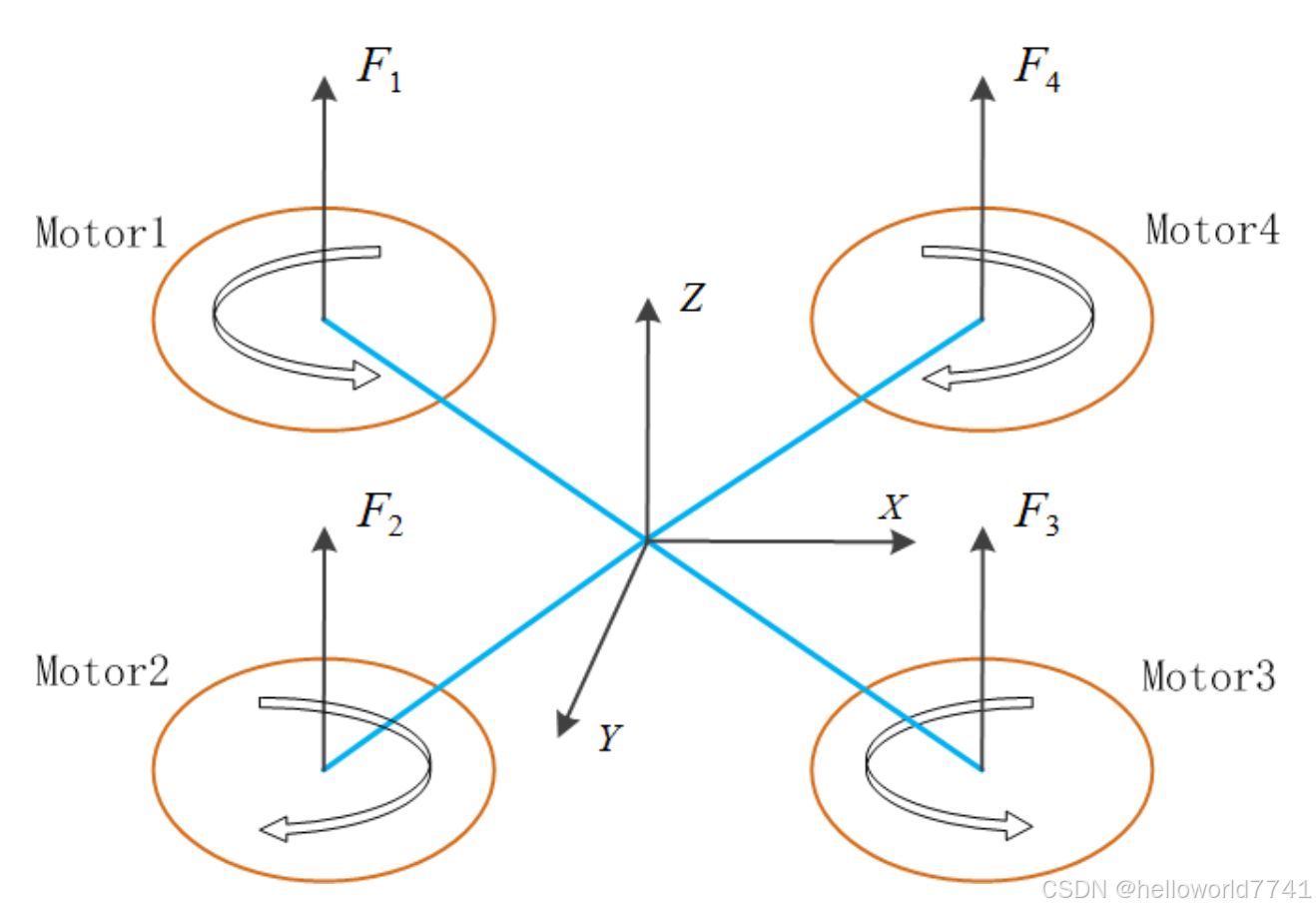
在四旋翼无人机中,相邻的两个螺旋桨旋转方向是相反的。螺旋桨M1、M3的旋转方向为逆时针,螺旋桨M2、M4的旋转方向为顺时针。当飞行时,M2、M4所产生的逆时针反作用力(反扭矩)和M1、M3产生的顺时针反作用力(反扭矩)相抵消,飞机机身就可以保持稳定。在保证四旋翼无人机每个旋翼转速大小相同(产生的总扭矩为零),通过调整无人机四个旋翼的转速来进行各种运动。
1、垂直运动
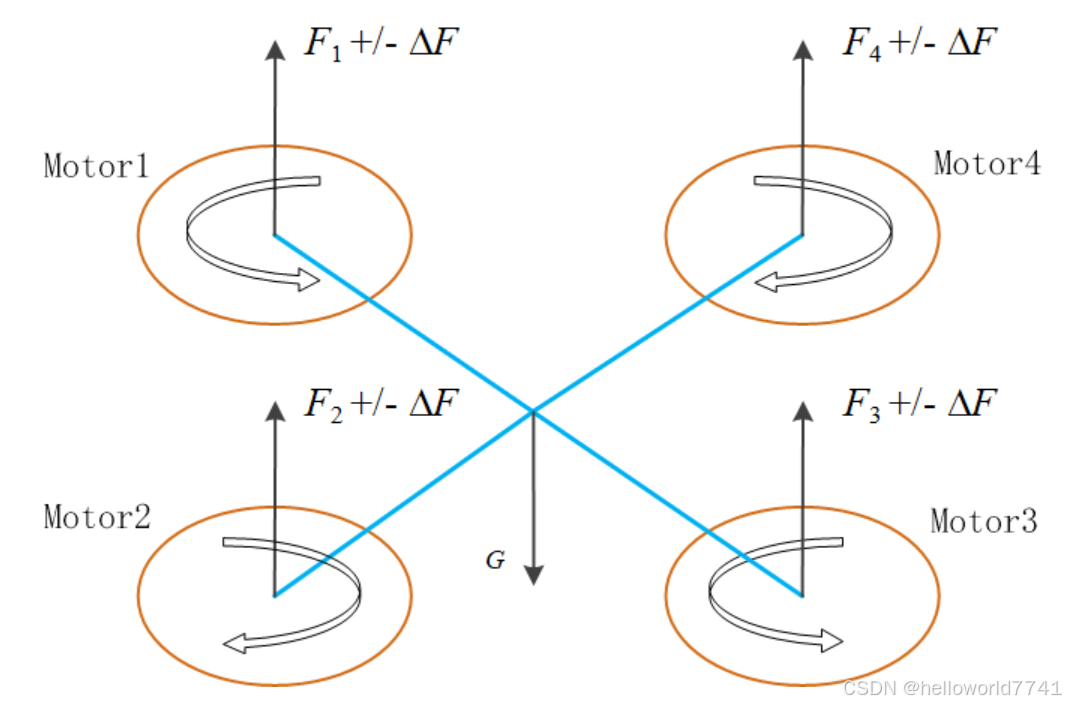
每个旋翼增加/减小大小相同的转速,便可实现无人机的垂直上升/下降运动。增加转速,无人机升力增加当大于重力时,垂直上升,反之下降。
2、俯仰运动
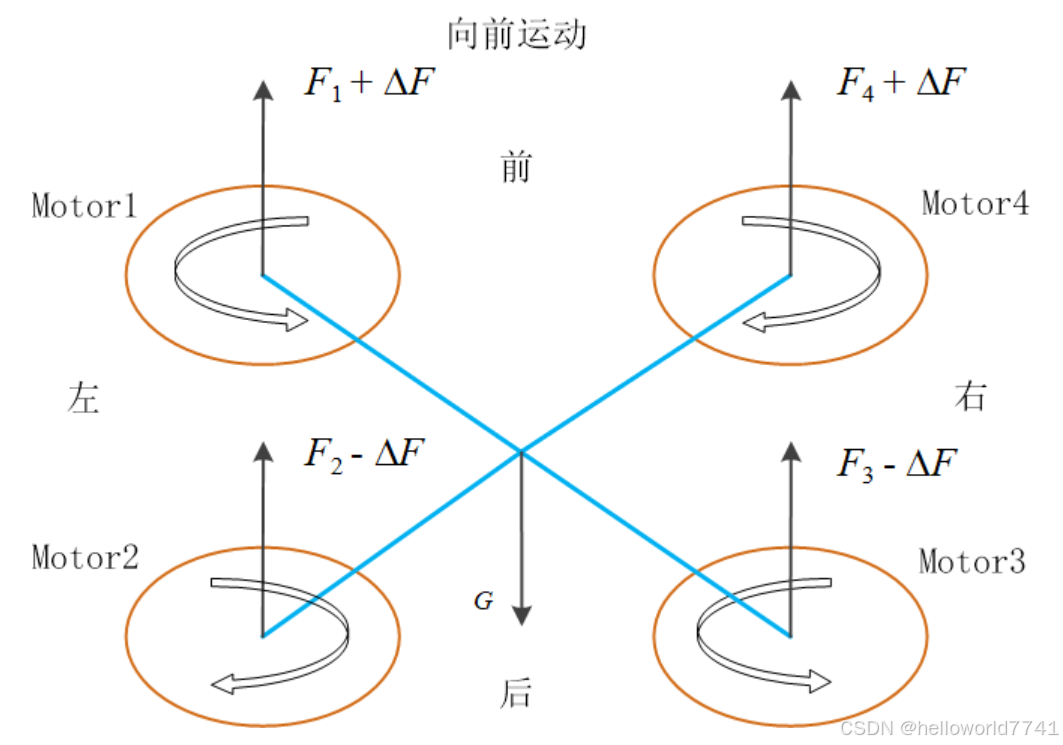
如图,将电机M1、M4的转速增加或者将M2、M3转速减小时,前两旋翼产生升力大于后两旋翼产生的升力,使四旋翼向后飞行。反之向前飞行。
评论记录:
回复评论: