
- 操作系统:ubuntu22.04
- OpenCV版本:OpenCV4.9
- IDE:Visual Studio Code
- 编程语言:C++11
算法描述
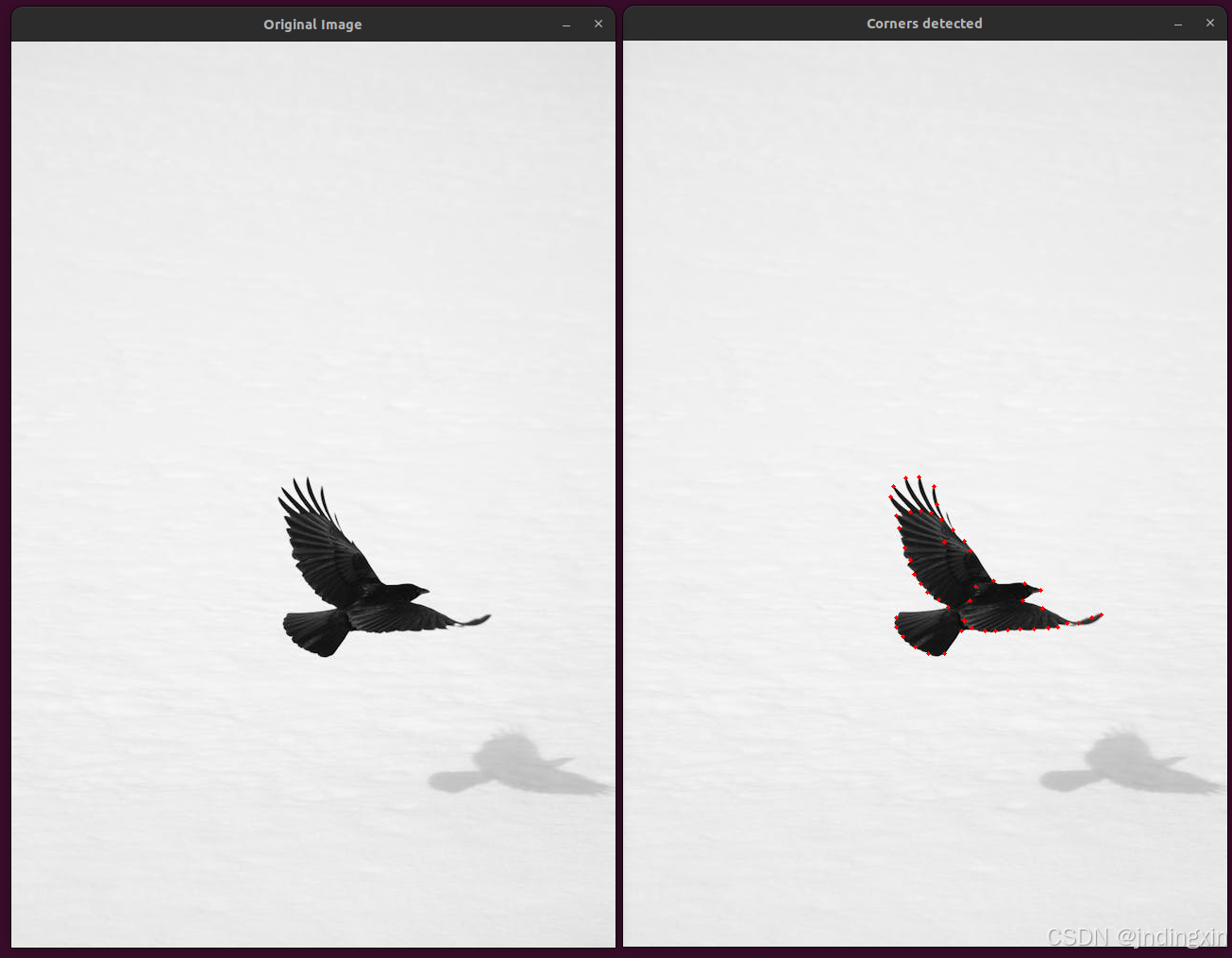
确定图像上的强角点。
该函数根据 240中所描述的方法查找图像中最显著的角点或者指定图像区域内的最显著角点。
- 函数使用 cornerMinEigenVal 或 cornerHarris 在源图像的每一个像素上计算角点的质量度量。
- 函数执行非极大值抑制(即保留局部最大值,在 3x3 邻域内)。
- 那些最小特征值小于 qualityLevel 乘以 qualityMeasureMap(x,y) 最大值的角点被剔除。
- 剩下的角点按照质量度量的降序进行排序。
- 函数会抛弃掉每一个在其距离小于 maxDistance 的位置上有更强角点的角点。
该函数可用于初始化基于点的目标跟踪器。
goodFeaturesToTrack 是 OpenCV 中用于角点检测的一个函数,它能够从图像中找到一些“好特征”,即角点。这些角点在后续的图像处理任务中非常有用,比如特征跟踪、光流计算等。
注释:
如果使用参数 qualityLevel 的不同值 A 和 B 调用该函数,并且 A > B,则返回的具有 qualityLevel=A 的角点向量将是具有 qualityLevel=B 的输出向量的前缀。
函数原型
void cv::goodFeaturesToTrack
(
InputArray image,
OutputArray corners,
int maxCorners,
double qualityLevel,
double minDistance,
InputArray mask = noArray(),
int blockSize = 3,
bool useHarrisDetector = false,
double k = 0.04
)
class="hljs-button signin active" data-title="登录复制" data-report-click="{"spm":"1001.2101.3001.4334"}">
评论记录:
回复评论: