
ODrive、VESC和SimpleFOC 教程链接汇总:请点击
一、PPM输入控制
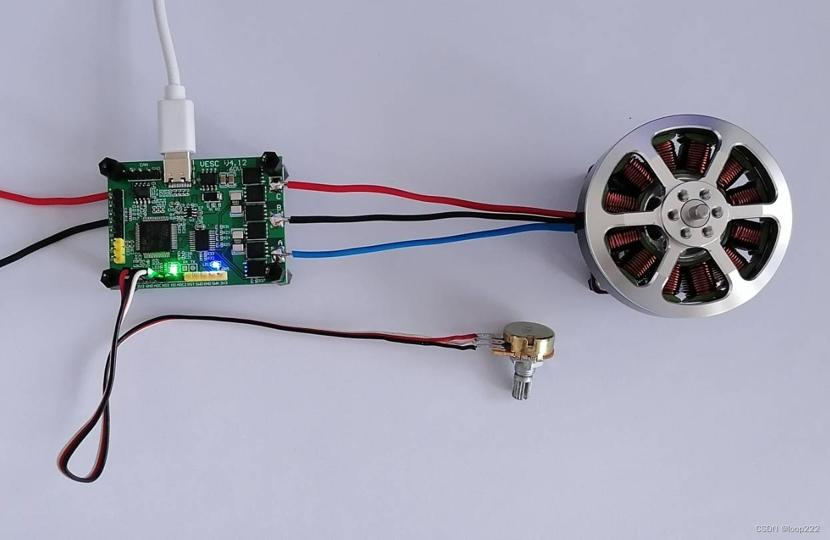
1.1、硬件准备
| 序号 | 名称 | 数量 |
|---|---|---|
| 1 | VESC4 | 1 |
| 2 | 5008电机 | 1 |
| 3 | 12V电源 | 1 |
| 4 | USB延长线 | 1 |
| 5 | 遥控器 | 1套 |

1.2、PPM信号
-
一般用油门做为PWM信号输出,油门是通道3,下图:
-
对于左手油门的遥控器来说,就是左边摇杆上下方向,下图:

-
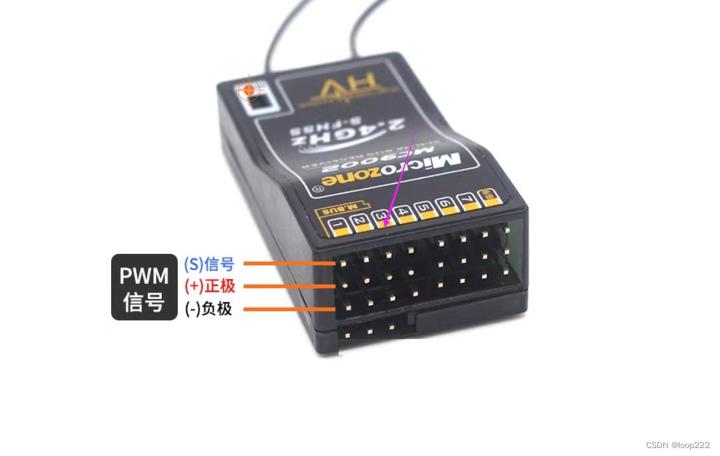
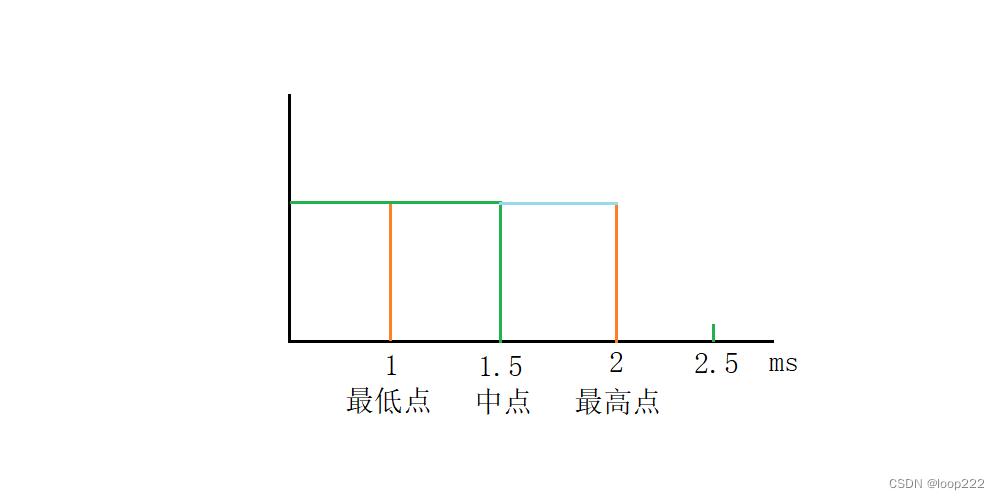
摇杆上下运动,接收机对应输出信号如下图:
PWM信号周期2.5ms(50Hz),信号输出高电平在1-2ms的范围内变化,摇杆中间位置时高电平为1.5ms,
-
接VESC,下图:

1.3、校准电机
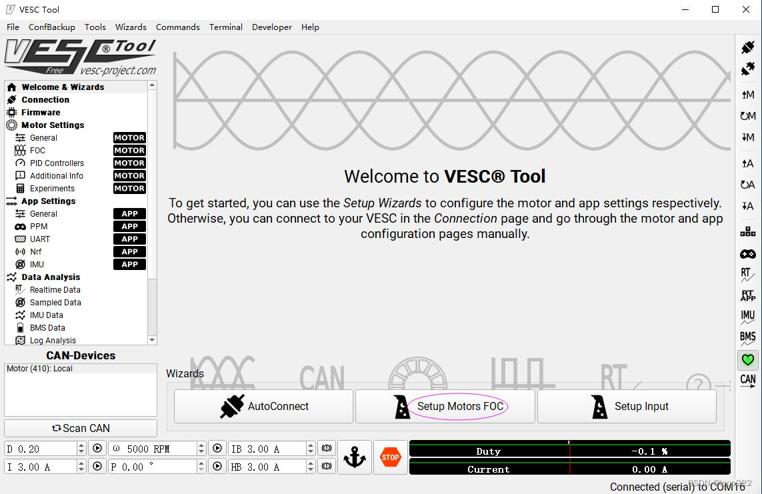
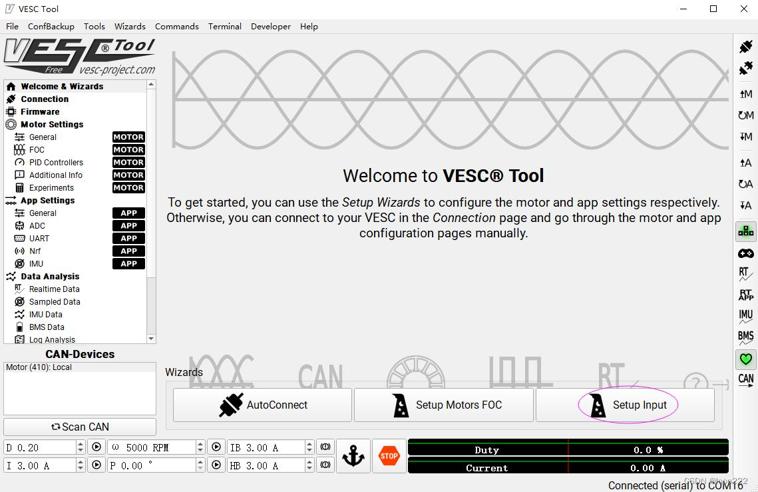
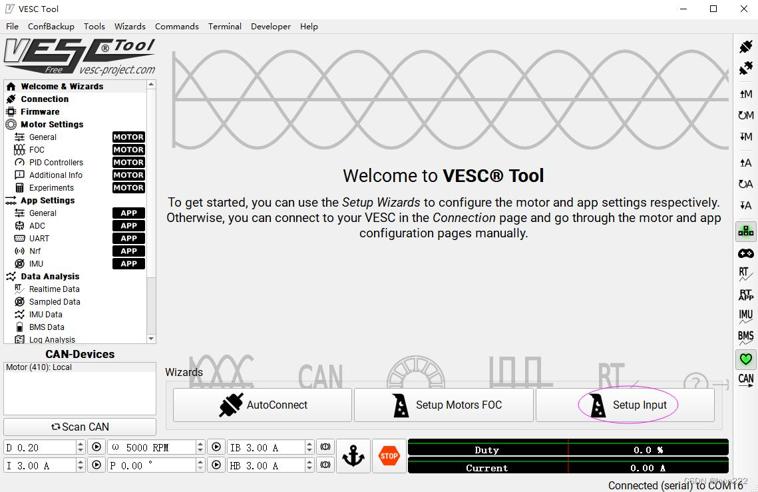
- 硬件接线完毕后,上电,待电脑识别VESC后,点击“AutoConnect”,右下角显示连接成功,
然后再点击“Setup Motors FOC”,进入配置流程,下图:
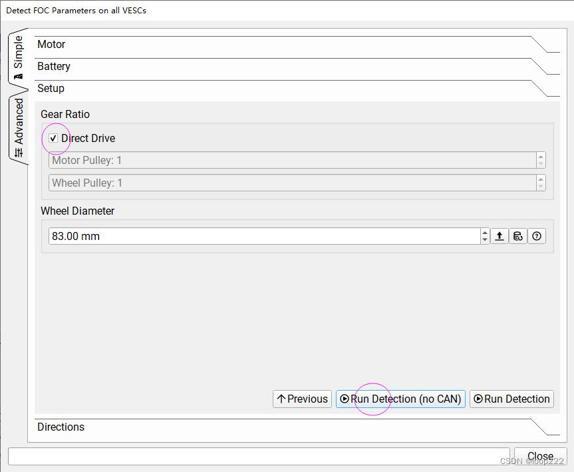
- 5008电机选择这两个都可以。检测阶段电机运行在开环状态,选择的电机越大,开环电流越大,电机越容易发热,下图:

- 校准大概需要一分钟时间,请耐心等待,下图:
更多配置说明可以参考前面教程《VESC操作入门——控制霍尔电机、无感电机和AS5047P》。
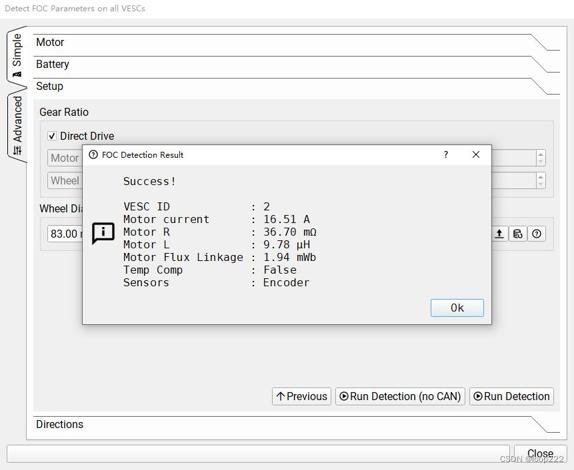
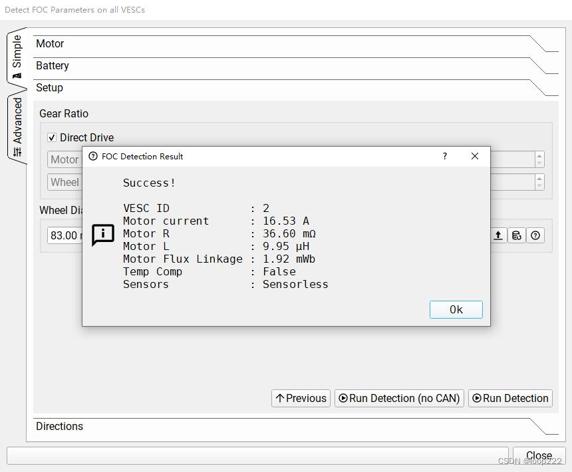
- 校准结果,下图:
点击OK,关闭。
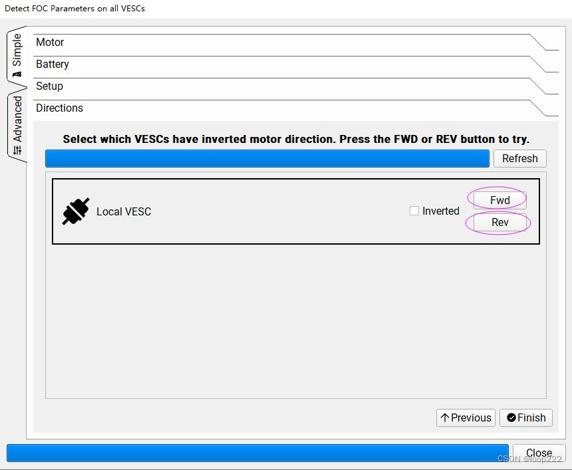
- 正反转测试,下图:
finish,关闭。
1.4、输入设置
- 选择设置输入,下图:
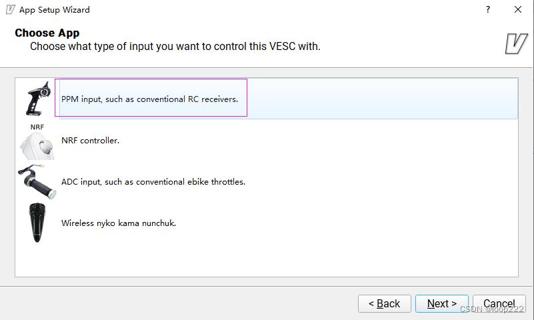
- 选择PPM,下图:
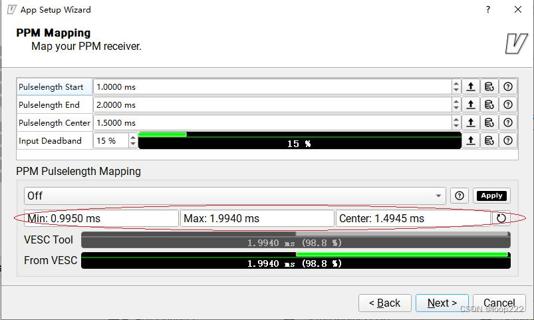
- 当前界面,上下摇动遥控器摇杆(可多操作几次),进度条根据摇杆变化,准确的测量出PWM的占空比,下图:
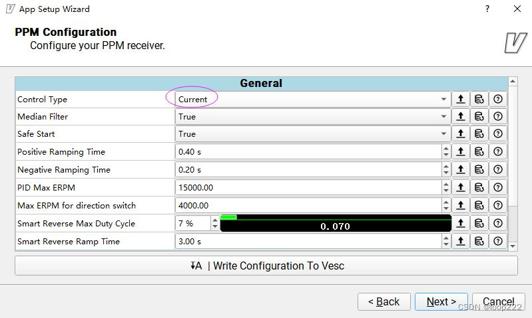
- 选择电流模式,下图:
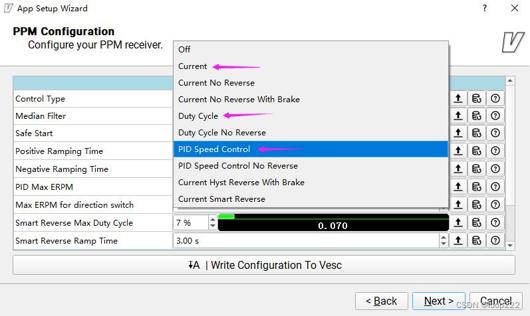
- 实际上也可以选择其它模式,
在实际操作的时候,因为电机是空载,电流很小就可以到达最大转速,所以 “Current” 模式缺乏行程感,
而下图另外2个模式就可以清晰的反应摇杆行程对电机转速的控制,
- APP中选择PPM并保存,下图:
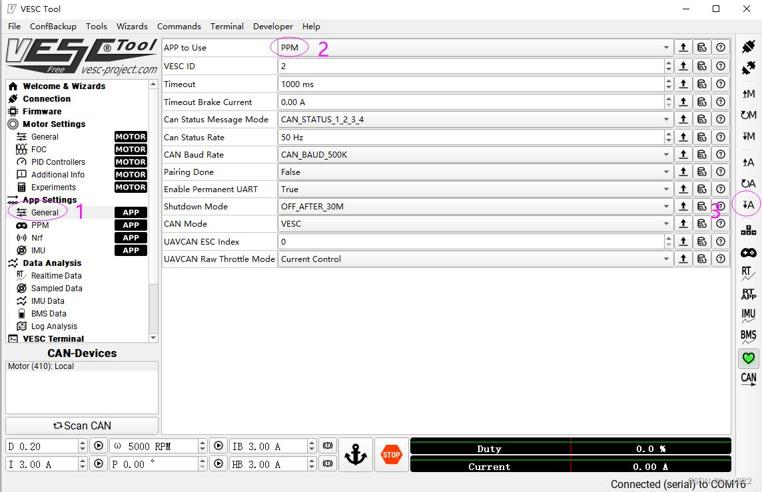
此时操作摇杆就可以控制电机转动,向上电机正转,向下电机反转。
注意操作时动作要慢,不要快速的上下划动摇杆,电机转速突变容易产生高压反电动势,本人的12V小功率开关电源就这样被击穿了。如果是锂电池可能会好点。
二、ADC输入控制
2.1、硬件准备
2.2、更改固件
-
因为上面测试PPM时使用了带AS5047P编码器的电机,固件中默认使能了SPI接口,所以需要重新烧写不支持SPI接口的固件。固件差别在 《VESC简介与国产替代方案》 这篇文章第3.3小节有说明。
-
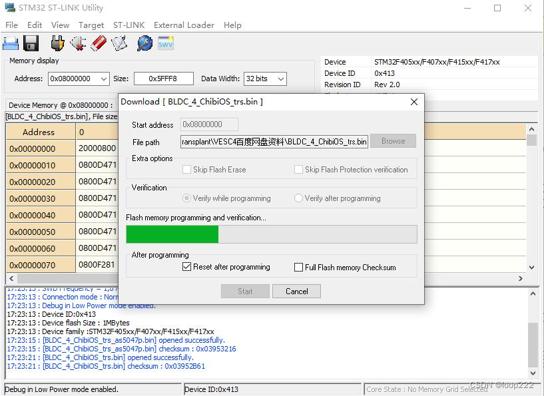
请使用STlink配合STM32 ST-LINK Utility软件烧写,下图:
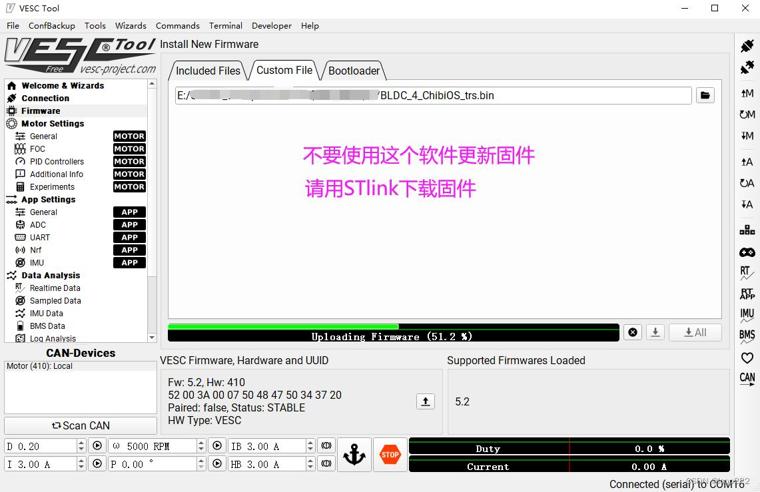
- 不要使用vesc_tool更新固件,经本人反复对比测试,确认更新无效,下图:
2.3、电压信号
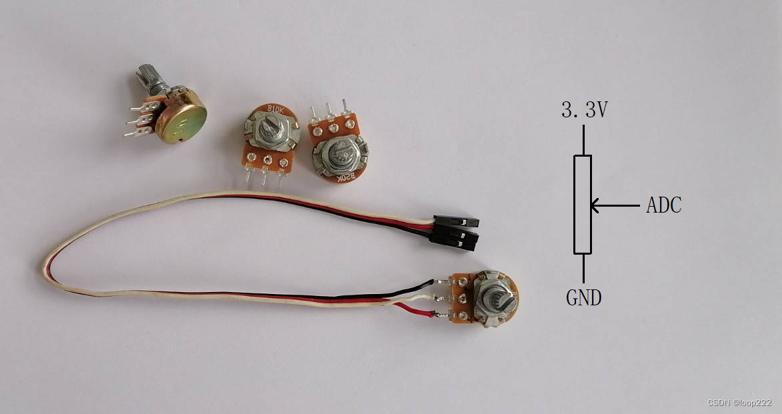
- 用10K电位器(也可以用其它阻值),下图
这种电位器质量比较差,测试过程中多注意电压信号输出,
- 接VESC,下图:

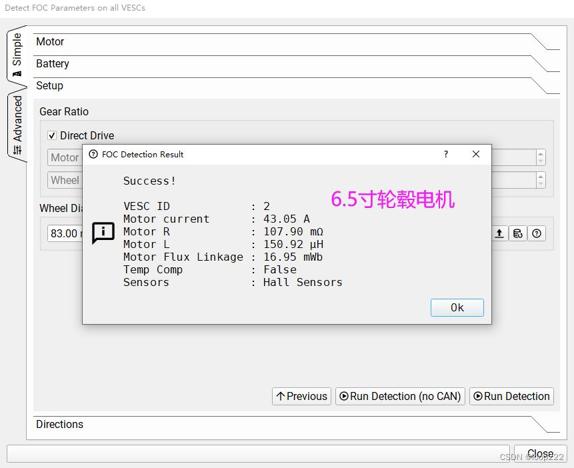
2.4、校准电机
- 接入无感电机,所以校准参数如下图,
校准过程请参考上面1.3小节,
2.5、输入设置
- 选择 setup input,下图:
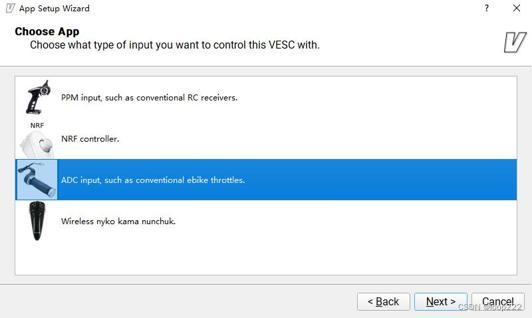
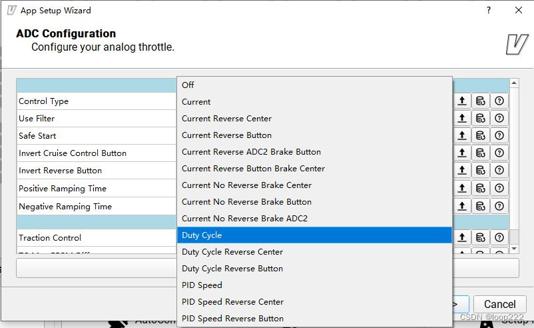
- 选择ADC输入,下图:
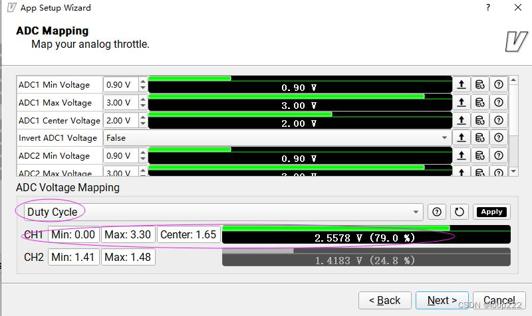
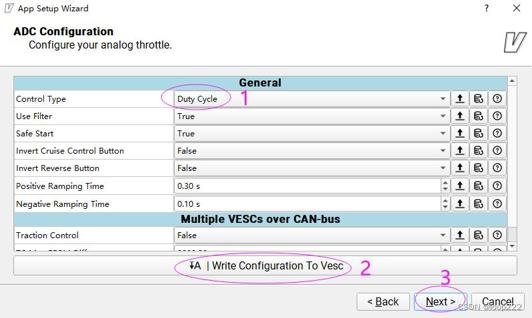
- 选择“Duty Cycle”(也可以不选),转动电位器,进度条根据电位器变化,准确的测量出实时电压,下图:
- 选择占空比,写入,下一步,下图:
- 也可以选择其它模式,待熟练后可尝试,下图:
- 点击下一步,完毕。
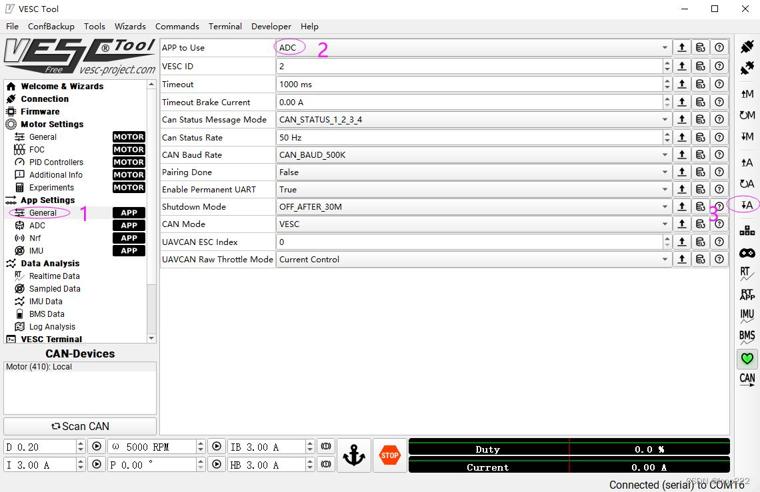
- APP中选择ADC并保存,下图:
- 配置完毕,转动电位器,需先转到最低位(最小电压输出0),然后缓慢调大,当输出电压大于1.2V左右时,电机开始转动。
- 为什么要大于1V才有输出,这跟电动车的转把特性有关,下面介绍。
三、电动车转把控制
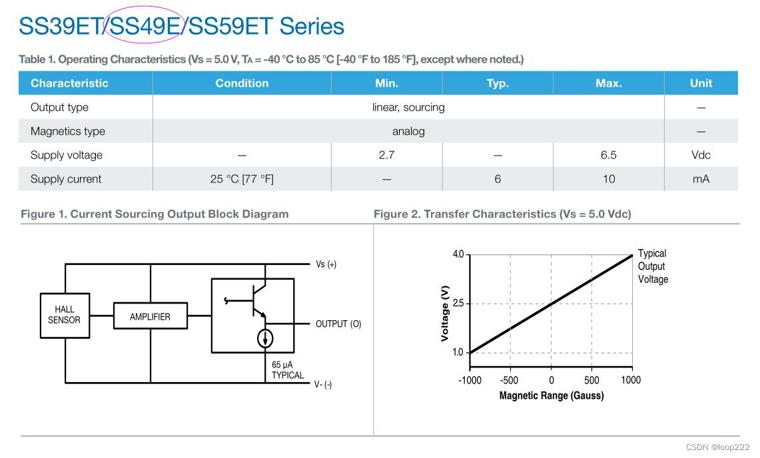
3.1、转把说明

- 转把是由一个固定的霍尔元件和一个能转动的半圆形磁条构成,
磁条固定在转柄上,它的磁性是一头强一头弱,起初霍尔是对应磁铁最弱的一端,转动转把霍尔对应磁铁的磁性加大,霍尔感应磁场变强,信号线的电压随着升高,
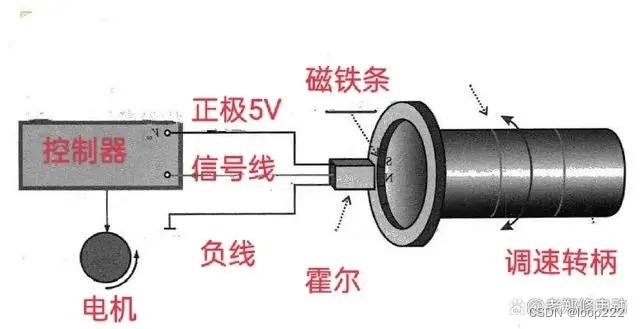
- SS49E接5V电源,随磁场增强,信号输出电压在1—4V,下图:
3.2、转把测试
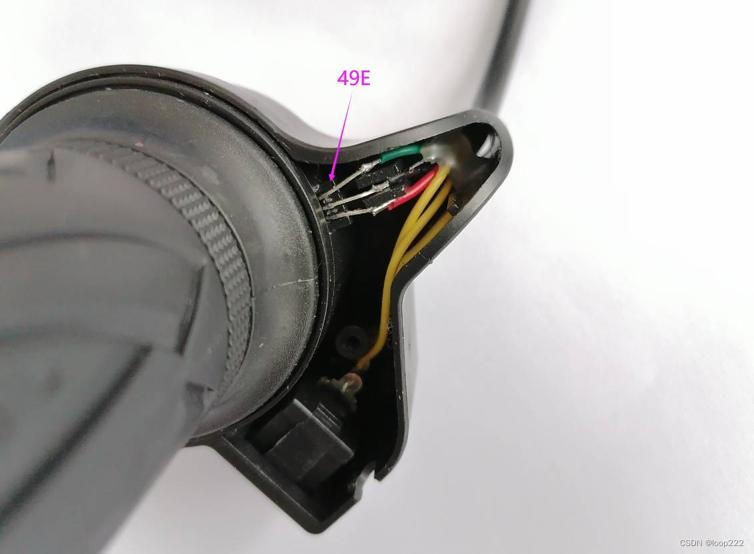
- 新买的转把,下图:

- 局部拆开,可以看到霍尔元件和磁铁,下图:
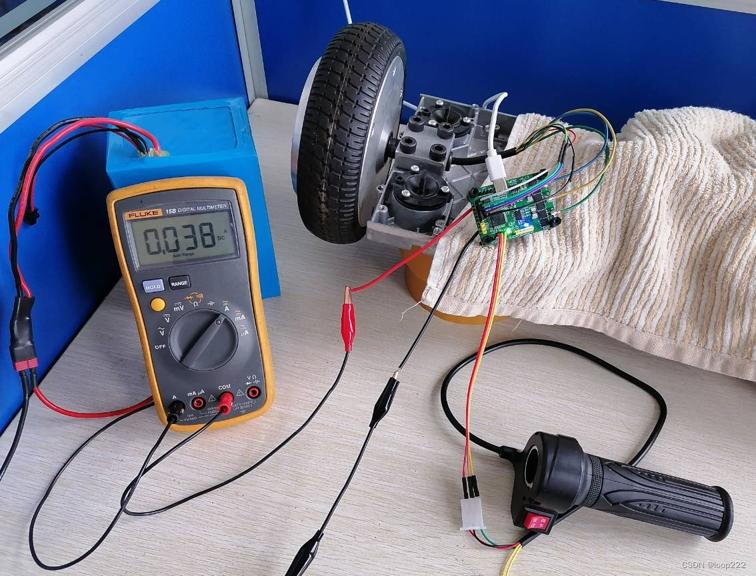
- 接轮毂电机,下图:
电池为7S(28V),
VESC 购买链接:某宝购买
- vesc_tool校准,参考上面,不再赘述,
- 转把电源接5V,输出信号电压范围是:0.85—4.49V,
转把电源接3.3V,输出信号电压范围:0.82—2.6V,
信号电压超过3.3V,AD转换就满量程了,实际操作中,会觉得后面虚位比较大,所以选择3.3V电源。
- 输入模式如果选择 “current”,因为电机空载,稍微加油门就全速转动,
- 用 “Duty Cycle” 可以更好的体验油门对转速的控制,
四、ADC的其它模式
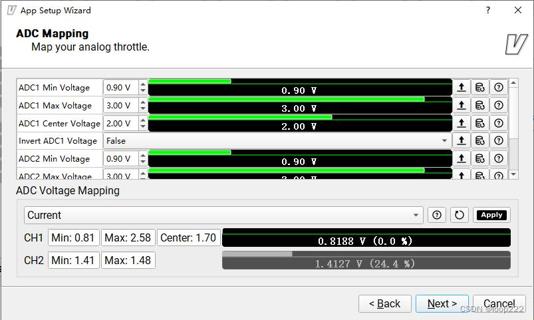
4.1、Current No Reverse Brake ADC2
这个操作模式增加了刹车功能,控制逻辑与我们骑电动车的逻辑完全相同,

- 油门接ADC1,和上面用法一致,
- 刹车接ADC2(刹车是一个开关信号,但确实要接在ADC2引脚上),
- ADC2为低电平时,油门控制电机转速,ADC2为高电平时,电机立刻停止转动无论油门大小。
4.2、Current No Reverse Brake Center
用摇杆控制电机转速,

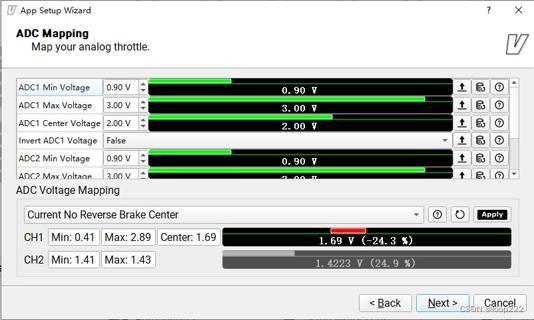
摇杆电位器居中位置,正向加速,反向减速,完全放开刹车,有点“单踏板”的意思。
注意摇杆操作要慢,不要突然松开摇杆,防止反电动势击穿电源,建议用锂电池供电。
4.3、 其它模式
搜到一篇比较好的视频教程,https://www.bilibili.com/video/av930193861/,有兴趣的同学可以细细研究。
(完)
评论记录:
回复评论: