
1.前言
1.1.上位机安装
下载地址
根据github上的readme.md文件安装即可。其实需要做一件事,就是进如下载的文件夹,运行pip install -r "requirements.txt"命令,要安装的文件作者已经全部去写在里面了,一键安装即可。
1.2.注意事项
这个上位机是使用串口实时打印的,并且处于主循环中,其优先级与motor.loopFOC函数相同,所以会很大程度上影响电机的控制,控制应用中一定不能用,调参可以用。
2.SimpleFOC硬件端程序
以位置控制程序为例,程序实例如下:
#include 
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
3.软件操作
3.1.打开软件
进入下载的文件夹,运行python simpleFOCStudio.py启动上位机
3.2.添加页面
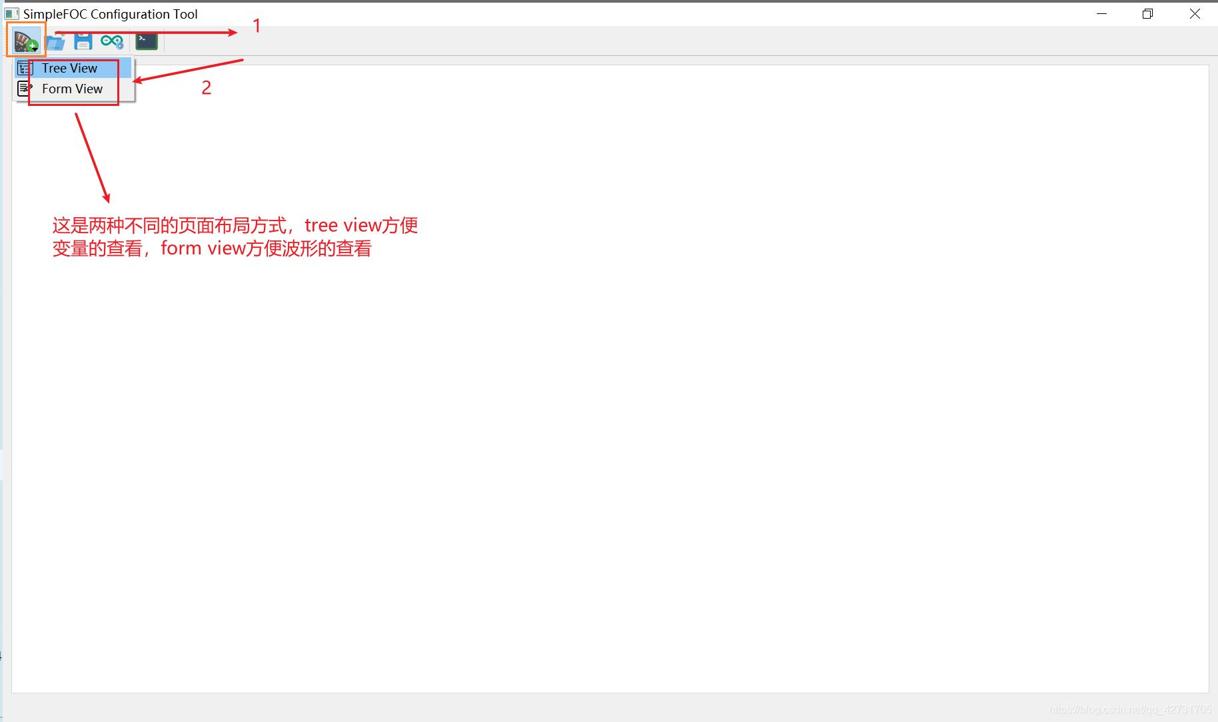
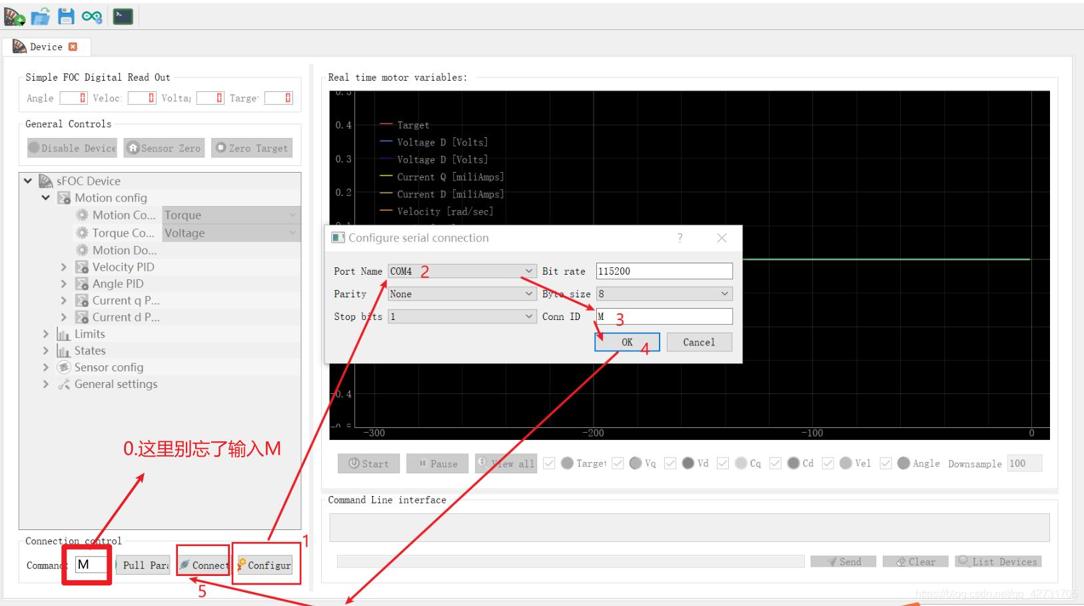
3.3.连接电机
以tree view页面布局为例:
3.4.功能使用
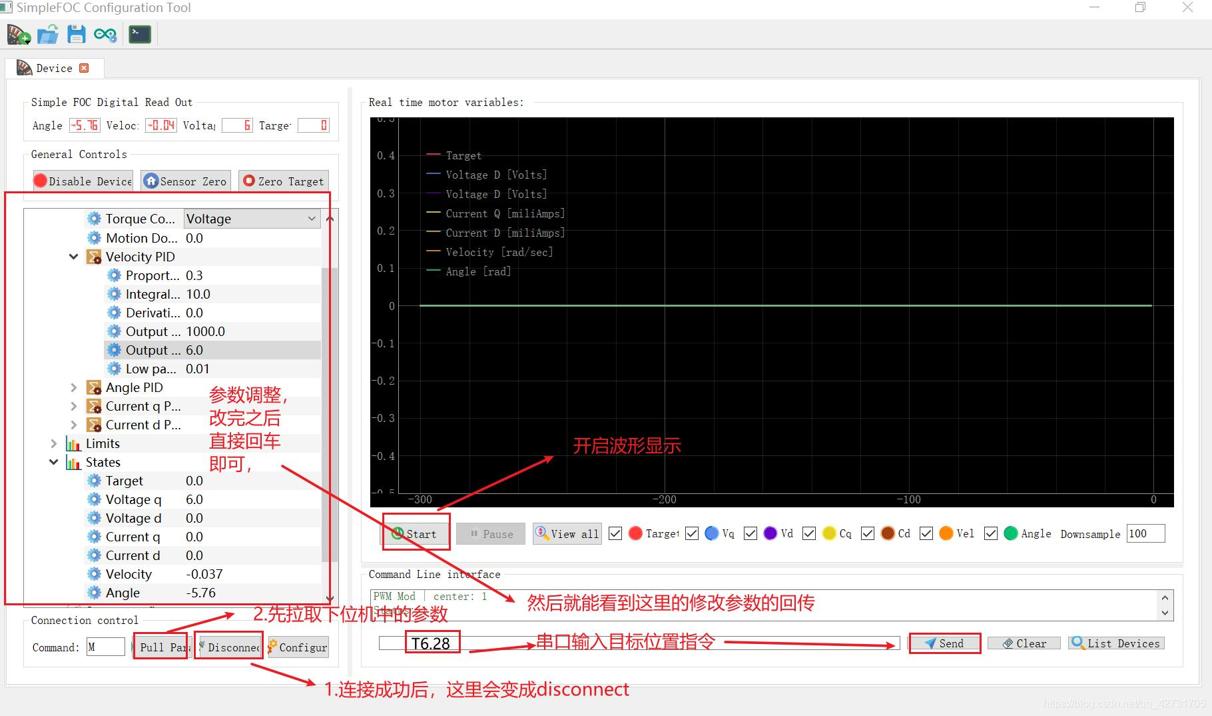
3.5.参数配置生成代码
基本上就这些功能。最关键的是最开始的连接下位机SimpleFOC的操作,连接上了剩下的就很简单了。
4.中间遇到的问题
一开始能连上,串口数据也有回传,但是发送目标位置指令电机就是没有反应,发热还很大。当时很懵逼,搞了好久也没弄好。
直到我直接使用Arduino IDE的串口,才发现电机PP校准失败了,因为我的电机14极对数,而示例是11极对数,我忘了改。
因此,使用这个上位机连接上SimpleFOC后,一定要检查一下串口回传的初始化信息是否正常!
评论记录:
回复评论: