
SimpleFOC的教程比较多,做了一个总的链接,欢迎点击阅读:SimpleFOC教程链接汇总
一、电机的三种控制模式
1、力矩控制模式
◎电机在运行过程的电流,始终等于给定的值。
◎比如使用电机来拉伸弹簧,设定电流值越大,弹簧被拉伸的长度越长。设定电流越小,弹簧被拉伸的长度越短。设定电流为零,弹簧不被拉伸。
◎在SimpleFOC项目中,受限于Arduino UNO的运行速度,大部分例程没有使用电流采样,所以设定电压值代替设定电流值。
2、速度控制模式
◎让电机始终按照设定的速度运转,不因负载的变化而变化。
◎速度控制一般会采用内环电流环,外环速度环的方式,所以可以限制转动过程中的电流不超过设定值。
◎比如传送带传送物品,给定的速度不会因为传送带上是空载或者带载发生变化,但是当负载过大,电流超过设定值的时候会报警或自动停止。
3、位置控制模式
◎精确控制电机转动到指定角度,
◎位置控制一般会采用内环电流环,外环速度环,最外环位置环的方式,所以可以限制转动过程中的最大速度,和最大电流。
◎比如机械臂从A点运动到B点,并限制挥舞过程中的最大速度和最大力矩。
二、硬件说明
1、硬件清单
| 序号 | 名称 | 数量 |
|---|---|---|
| 1 | Arduino UNO | 1 |
| 2 | simpleFOCShield V2.0.3 | 1 |
| 3 | 带磁编码器的云台电机 | 1 |
| 4 | 12V电源 | 1 |
| 5 | 方口USB线 | 1 |
| 如下图所示: | ||
 |
simpleFOCShield V2.0.3购买链接:淘宝购买
带编码器电机购买链接:淘宝购买
2、硬件连接
⑴、SimpleFOCShield V2.0.3主板与Arduino UNO主板堆叠连接,
⑵、USB线连接Arduino UNO主板,与主板通信并提供5V电压,
⑶、12V电源连接主板TB_PWR接口,注意正负极,
⑷、电机三根相线连接至V2.0.3主板TB_M1的3个接口,
⑸、电机编码器的I2C接口与排母连接,注意正负极。
硬件连接如下图:

三、程序演示
1、力矩控制
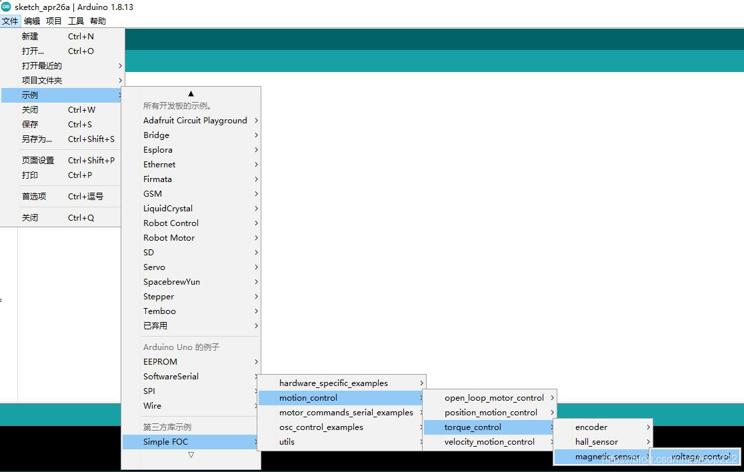
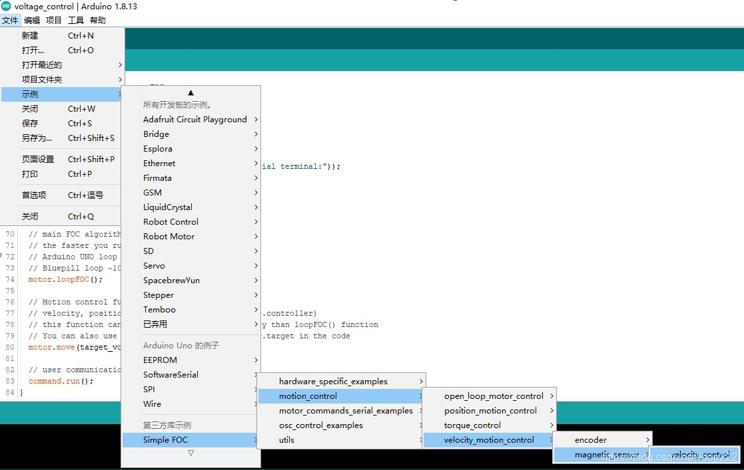
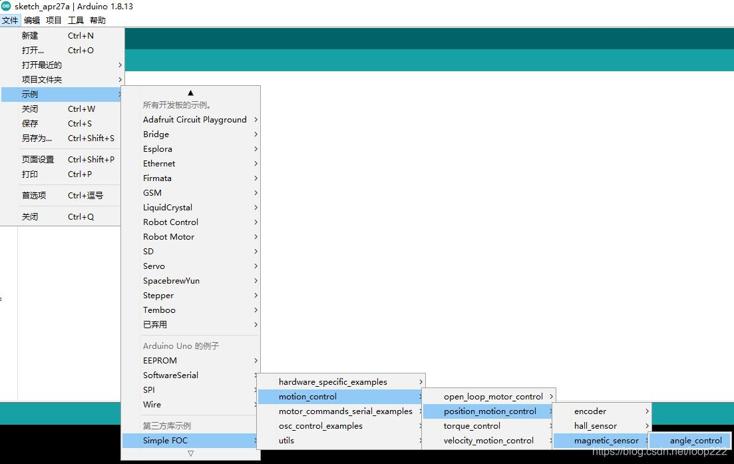
⑴、打开例程
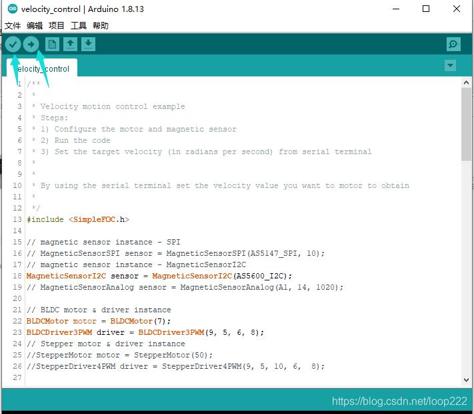
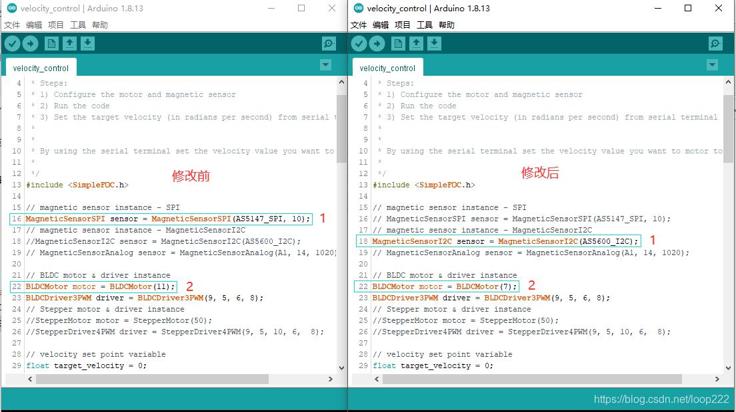
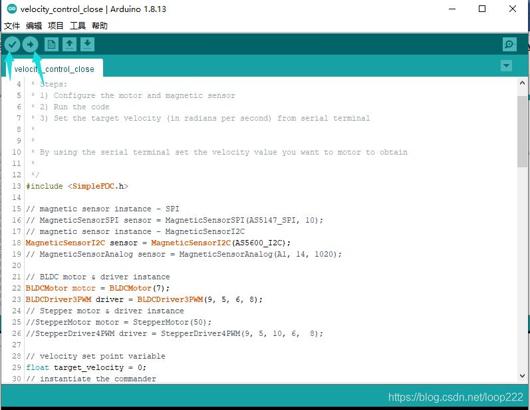
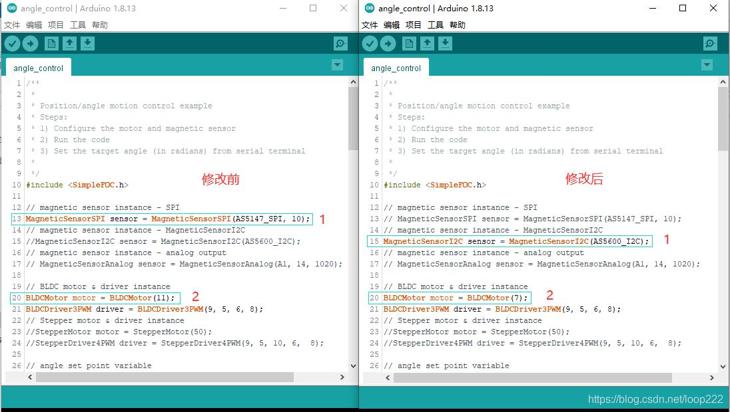
⑵、修改程序
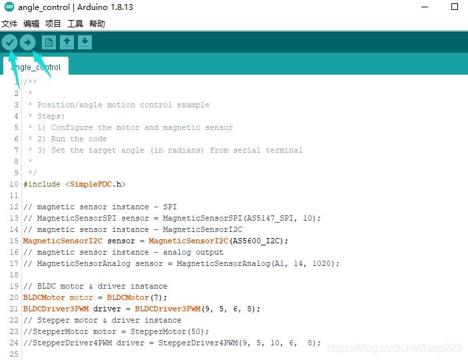
①、修改编码器为AS5600_I2C,
②、修改电机极对数为7,
例程为只读文件,可以验证上传,如需保存要“另存为”。

motor.voltage_sensor_align 控制电机上电检测时的电流。
大功率航模电机设置的小一点0.5-1;小功率云台电机设置的大一点1-3。
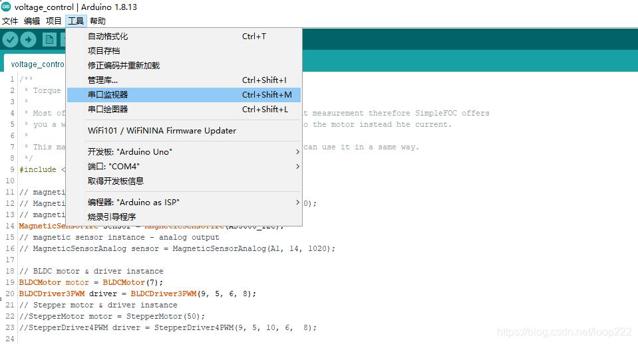
⑶、验证上传
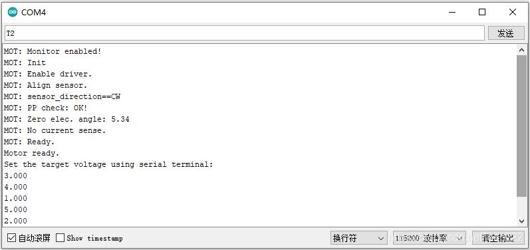
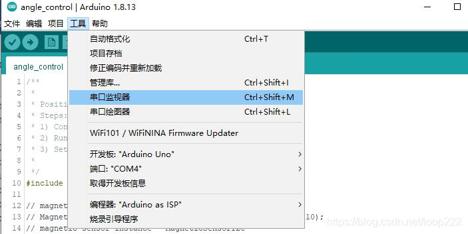
⑷、打开串口监视器
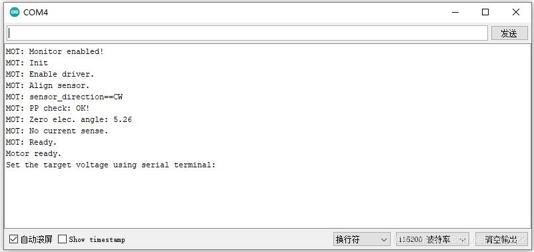
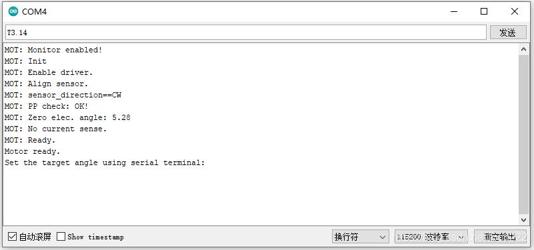
⑸、等待初始化
初始化完成后,电机开始转动,
⑹、电机观测
此时对电机施加阻力,电机表现为固定大小的力矩,使劲捏紧电机会停止,
⑺、发送指令
设定不同的电压值,电机转速不同,表现出大小不同的力矩,如果此时有电流表可以观测到电流也不相同,
⑻、程序说明
力矩模式是控制电流实现对力矩的控制,但在simpleFOC项目中,用电压代替电流,通过设定不同的电压实现对力矩的控制,

闭环力矩模式演示视频:https://www.bilibili.com/video/BV1rq4y1E7Vd/
2、速度控制
⑴、打开例程
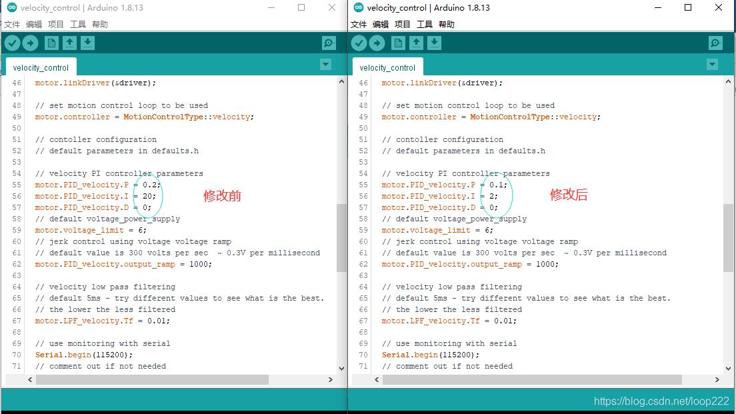
⑵、修改程序
①、修改编码器为AS5600_I2C,
②、修改电机极对数为7,
例程为只读文件,可以验证上传,如需保存要“另存为”。
⑶、验证上传
⑷、打开串口监视器
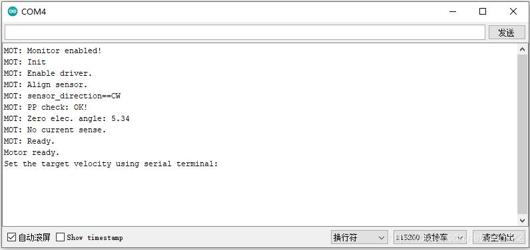
⑸、等待初始化
初始化完成后,电机静止,锁定在起点位置,
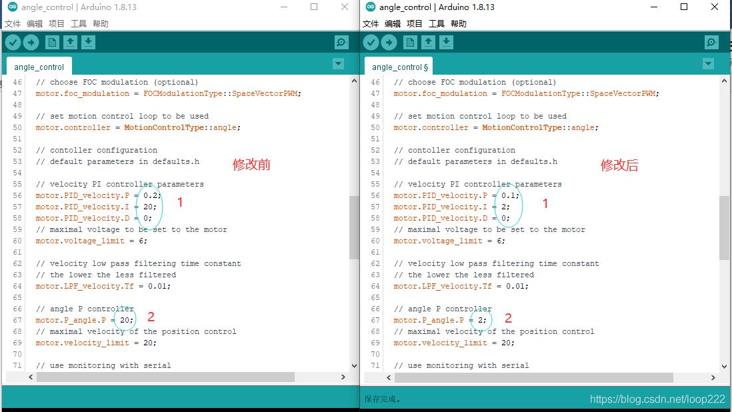
注意:不同电机需要设定不同的PID参数,参数不符可能会导致电机振动,忽快忽慢等异常,下图修改后的参数仅保证本人当前使用的电机运转平稳。PID调节方法请自行百度。
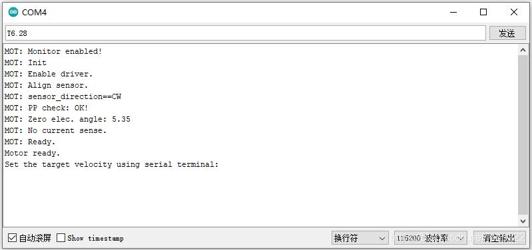
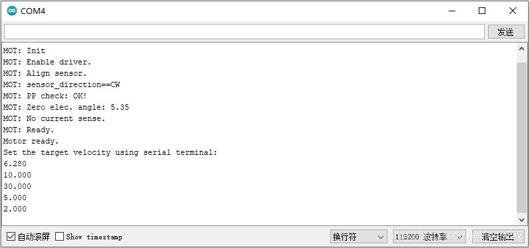
⑹、发送指令
设定电机速度,电机转动,比如设置T6.28,电机以6.28rad/s的速度转动,即一圈一秒,
⑺、电机观测
对电机施加阻力会发现,无论速度设置为多少,电机为了达到设定的转速,会持续增加动力(如果有电流表,可以看到电流不断增加),这与力矩模式中的恒定阻力截然不同。
闭环速度模式演示视频:https://www.bilibili.com/video/BV11y4y1g7mC/
3、角度控制
⑴、打开例程
⑵、修改程序
①、修改编码器为AS5600_I2C,
②、修改电机极对数为7,
例程为只读文件,可以验证上传,如需保存要“另存为”。
⑶、修改PID参数
位置环内是速度环,所以要修改的参数包含速度环和位置环的两套PID参数。
下图修改的参数并不一定适合所有电机,也不一定是当前使用电机的最佳参数,对PID的更深入了解请自行百度。
⑷、验证上传
⑸、打开串口监视器
⑹、等待初始化
初始化完成后,电机静止,锁定在起点位置。输入角度指令,点击发送,
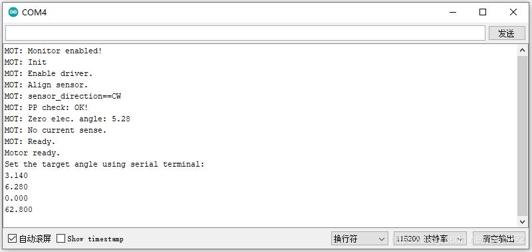
⑺、电机操作
设定不同角度,观察电机的转动位置。
当前例程中,角度采用累加方式,比如当前输入指令为“T10”,电机转过10rad后停止,再输入指令“T11”,则电机沿着刚才的方向再转过1rad后停止。
闭环位置模式演示视频:https://www.bilibili.com/video/BV1Ny4y137XX/
(完)
欢迎加入simpleFOC技术交流群:923734429 群已满根据提示添加新群 (入群申请写:CSDN)
请继续阅读相关文章:
SimpleFOC(一)—— 简介(附有文件下载链接)
SimpleFOC(二)—— 快速入门 (开环控制)
SimpleFOC(三)—— AS5600角度读取
SimpleFOC(五)—— 双电机控制
SimpleFOC(六)—— PowerShield和AS5047P
SimpleFOC(七)——STM32(Bluepill)的应用
SimpleFOC(八)—— 理论+实践 深度分析SVPWM
SimpleFOC(九)—— 霍尔电机控制
评论记录:
回复评论: