
00. 目录
01. 命令概述
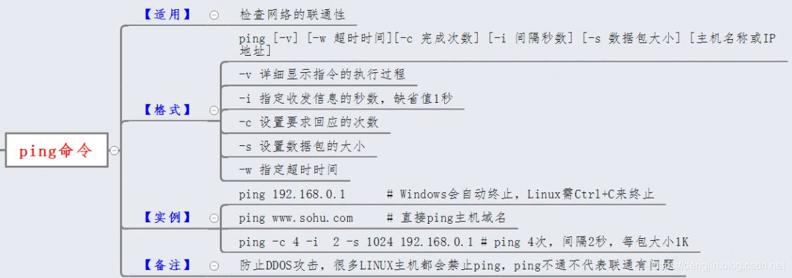
ping命令用来测试主机之间网络的连通性。执行ping指令会使用ICMP传输协议,发出要求回应的信息,若远端主机的网络功能没有问题,就会回应该信息,因而得知该主机运作正常。
ping, ping6 - 向网络主机发送ICMP回显请求(ECHO_REQUEST)分组。
注意:Linux系统下的ping命令与Windows系统下的ping命令稍有不同。Windows下运行ping命令一般会发出4个请求就结束运行该命令;而Linux下不会自动终止,此时需要我们按CTR+C终止或者使用-c参数为ping命令指定发送的请求数目。
02. 命令格式
格式:ping [选项] [参数]
- 1
03. 常用选项
-d 使用Socket的SO_DEBUG功能
-c 指定发送报文的次数
-i 指定收发信息的间隔时间
-I 使用指定的网络接口送出数据包
-l 设置在送出要求信息之前,先行发出的数据包
-n 只输出数值
-p 设置填满数据包的范本样式
-q 不显示指令执行过程
-R 记录路由过程
-s 设置数据包的大小
-t 设置存活数值TTL的大小
-v 详细显示指令的执行过程
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
04. 参考示例
4.1 测试能否ping通IP
[root@localhost ~]# ping 172.16.0.2
PING 172.16.0.2 (172.16.0.2) 56(84) bytes of data.
64 bytes from 172.16.0.2: icmp_seq=1 ttl=255 time=11.3 ms
64 bytes from 172.16.0.2: icmp_seq=2 ttl=254 time=1.71 ms
- 1
- 2
- 3
- 4
4.2 测试能否ping通域名
[root@localhost ~]# ping www.baidu.com
PING www.a.shifen.com (183.232.231.172) 56(84) bytes of data.
64 bytes from 183.232.231.172 (183.232.231.172): icmp_seq=1 ttl=57 time=7.93 ms
64 bytes from 183.232.231.172 (183.232.231.172): icmp_seq=2 ttl=57 time=7.89 ms
64 bytes from 183.232.231.172 (183.232.231.172): icmp_seq=3 ttl=57 time=8.70 ms
- 1
- 2
- 3
- 4
- 5
4.3 ping不同某个IP的情形
[root@localhost ~]# ping 172.16.0.89
PING 172.16.0.89 (172.16.0.89) 56(84) bytes of data.
From 172.16.0.76 icmp_seq=1 Destination Host Unreachable
From 172.16.0.76 icmp_seq=2 Destination Host Unreachable
From 172.16.0.76 icmp_seq=3 Destination Host Unreachable
From 172.16.0.76 icmp_seq=4 Destination Host Unreachable
- 1
- 2
- 3
- 4
- 5
- 6
4.4 指定ping的次数
[root@localhost ~]# ping -c 2 172.16.0.2
PING 172.16.0.2 (172.16.0.2) 56(84) bytes of data.
64 bytes from 172.16.0.2: icmp_seq=1 ttl=254 time=1.68 ms
64 bytes from 172.16.0.2: icmp_seq=2 ttl=254 time=1.81 ms
--- 172.16.0.2 ping statistics ---
2 packets transmitted, 2 received, 0% packet loss, time 1004ms
rtt min/avg/max/mdev = 1.685/1.747/1.810/0.075 ms
[root@localhost ~]#
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
4.5 指定ping的次数和时间间隔
[root@localhost ~]# ping -c 4 -i 0.5 172.16.0.2
PING 172.16.0.2 (172.16.0.2) 56(84) bytes of data.
64 bytes from 172.16.0.2: icmp_seq=1 ttl=254 time=1.76 ms
64 bytes from 172.16.0.2: icmp_seq=2 ttl=254 time=1.75 ms
64 bytes from 172.16.0.2: icmp_seq=3 ttl=254 time=2.27 ms
64 bytes from 172.16.0.2: icmp_seq=4 ttl=254 time=1.62 ms
--- 172.16.0.2 ping statistics ---
4 packets transmitted, 4 received, 0% packet loss, time 1511ms
rtt min/avg/max/mdev = 1.626/1.853/2.270/0.246 ms
[root@localhost ~]#
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
4.6 指定ping的次数和域名
[root@localhost ~]# ping -c 5 www.baidu.com
PING www.a.shifen.com (183.232.231.172) 56(84) bytes of data.
64 bytes from 183.232.231.172 (183.232.231.172): icmp_seq=1 ttl=57 time=8.55 ms
64 bytes from 183.232.231.172 (183.232.231.172): icmp_seq=2 ttl=57 time=8.17 ms
64 bytes from 183.232.231.172 (183.232.231.172): icmp_seq=3 ttl=57 time=7.91 ms
64 bytes from 183.232.231.172 (183.232.231.172): icmp_seq=4 ttl=57 time=7.77 ms
64 bytes from 183.232.231.172 (183.232.231.172): icmp_seq=5 ttl=57 time=8.29 ms
--- www.a.shifen.com ping statistics ---
5 packets transmitted, 5 received, 0% packet loss, time 4013ms
rtt min/avg/max/mdev = 7.770/8.140/8.552/0.282 ms
[root@localhost ~]#
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
4.7 综合实例
[root@localhost ~]# ping -i 3 -s 1024 -t 255 172.16.0.2
PING 172.16.0.2 (172.16.0.2) 1024(1052) bytes of data.
1032 bytes from 172.16.0.2: icmp_seq=1 ttl=254 time=2.15 ms
1032 bytes from 172.16.0.2: icmp_seq=2 ttl=254 time=1.96 ms
1032 bytes from 172.16.0.2: icmp_seq=3 ttl=254 time=1.98 ms
1032 bytes from 172.16.0.2: icmp_seq=4 ttl=254 time=2.02 ms
- 1
- 2
- 3
- 4
- 5
- 6
说明:-i 3 发送周期为 3秒 -s 设置发送包的大小为1024 -t 设置TTL值为 255
4.8 综合实例
[root@localhost ~]# ping -i 0.2 -c 3 -I 172.16.0.76 172.16.0.2 -q
PING 172.16.0.2 (172.16.0.2) from 172.16.0.76 : 56(84) bytes of data.
--- 172.16.0.2 ping statistics ---
3 packets transmitted, 3 received, 0% packet loss, time 406ms
rtt min/avg/max/mdev = 1.653/1.953/2.498/0.386 ms
[root@localhost ~]#
- 1
- 2
- 3
- 4
- 5
- 6
- 7
说明:-i 指定发送数据包时间间隔,-c 指定一共发送多少个数据包,-I 指定源地址,-q指定直接显示程序的启动和最后结果
4.9 综合实例
[root@localhost ~]# ping -I 172.16.0.76 172.16.0.2 -w 3
PING 172.16.0.2 (172.16.0.2) from 172.16.0.76 : 56(84) bytes of data.
64 bytes from 172.16.0.2: icmp_seq=1 ttl=254 time=1.64 ms
64 bytes from 172.16.0.2: icmp_seq=2 ttl=254 time=1.71 ms
64 bytes from 172.16.0.2: icmp_seq=3 ttl=254 time=1.63 ms
--- 172.16.0.2 ping statistics ---
3 packets transmitted, 3 received, 0% packet loss, time 2002ms
rtt min/avg/max/mdev = 1.632/1.664/1.715/0.059 ms
[root@localhost ~]#
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
【说明】
-I 网络界面:使用指定的网络界面送出数据包,即172.16.0.76是发出ping命令的主机IP地址,172.16.0.2是被ping的主机的IP地址。
-w 等待指定时间后停止ping程序的执行。当试图测试不可达主机时此选项很有用,时间单位是秒。
4.10 综合实例
[root@localhost ~]# ping -c 1 www.baidu.com | grep from | cut -d " " -f 4
183.232.231.174
[root@localhost ~]#
- 1
- 2
- 3
利用ping命令获取指定网站的IP地址
【常见问题分析】
-
No Answer: 原因可能是,对方主机没工作,双方网络配置不正确,路由问题等。
-
Request Time Out: 对方主机已关机,路由问题或对端防火墙设置禁止ping
-
Unknown Host Name: DNS设置问题,或者对方主机不存在
-
Destination Net Unreachable: 双方没有建立连接,或对方主机不存在
-
Bad IP Address: IP地址不存在或IP不能被DNS服务器解析
-
transmit failed,error code: 网卡驱动问题
-
no rout to host 网卡工作不正常
-
Ping 127.0.0.1 如果ping不通,表明本地机TCP/IP协议不能正常工作。
05. 使能和禁用ping的方法
5.1 临时允许ping
[root@localhost ~]# echo 0 > /proc/sys/net/ipv4/icmp_echo_ignore_all
[root@localhost ~]#
- 1
- 2
5.2 临时禁用ping
[root@localhost ~]# echo 1 > /proc/sys/net/ipv4/icmp_echo_ignore_all
- 1
- 2
5.3 永久禁用ping
/etc/sysctl.conf 中增加一行
net.ipv4.icmp_echo_ignore_all=1 # 1表示禁止
- 1
修改完成后执行sysctl -p使新配置生效
5.4 永久使能ping
/etc/sysctl.conf 中增加一行
net.ipv4.icmp_echo_ignore_all=0 # 0表示允许
- 1
修改完成后执行sysctl -p使新配置生效
06. 总结
07. 附录
概述
功能简介
I2C(Inter Integrated Circuit)总线是由Philips公司开发的一种简单、双向二线制同步串行总线。由于其硬件连接简单、成本低廉,因此被广泛应用于各种短距离通信的场景。
运作机制
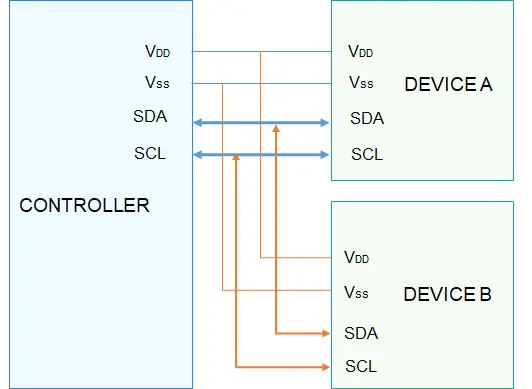
I2C以主从方式工作,通常有一个主设备和一个或者多个从设备,主从设备通过SDA(SerialData)串行数据线以及SCL(SerialClock)串行时钟线两根线相连(如图1)。
I2C数据的传输必须以一个起始信号作为开始条件,以一个结束信号作为传输的停止条件。数据传输以字节为单位,高位在前,逐个bit进行传输。
I2C总线上的每一个设备都可以作为主设备或者从设备,而且每一个设备都会对应一个唯一的地址,当主设备需要和某一个从设备通信时,通过广播的方式,将从设备地址写到总线上,如果某个从设备符合此地址,将会发出应答信号,建立传输。
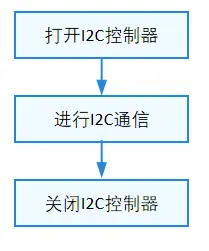
I2C接口定义了完成I2C传输的通用方法集合,包括:
-
I2C控制器管理:打开或关闭I2C控制器
-
I2C消息传输:通过消息传输结构体数组进行自定义传输
图 1 I2C物理连线示意图
使用指导
场景介绍
I2C通常用于与各类支持I2C协议的传感器、执行器或输入输出设备进行通信。
接口说明
I2C模块提供的主要接口如表1所示,具体API详见//drivers/hdf_core/framework/include/platform/i2c_if.h。
表 1 I2C驱动API接口功能介绍
class="table-box">| 接口名 | 接口描述 |
|---|---|
| DevHandle I2cOpen(int16_t number) | 打开I2C控制器 |
| void I2cClose(DevHandle handle) | 关闭I2C控制器 |
| int32_t I2cTransfer(DevHandle handle, struct I2cMsg *msgs, int16_t count) | 自定义传输 |

 class="blog_extension_card_cont">
class="blog_extension_card_cont">


评论记录:
回复评论: