
00. 目录
01. 命令概述
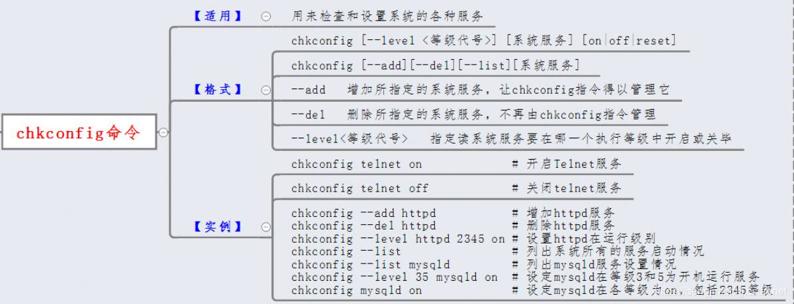
chkconfig命令检查、设置系统的各种服务。这是Red Hat公司遵循GPL规则所开发的程序,它可查询操作系统在每一个执行等级中会执行哪些系统服务,其中包括各类常驻服务。谨记chkconfig不是立即自动禁止或激活一个服务,它只是简单的改变了符号连接。
02. 命令格式
用法:
chkconfig [--list] [--type <type>] [name]
chkconfig --add <name>
chkconfig --del <name>
chkconfig --override <name>
chkconfig [--level <levels>] [--type <type>] <name> <on|off|reset|resetpriorities>
- 1
- 2
- 3
- 4
- 5
- 6
03. 常用选项
必要参数
--add 开启指定的服务程序
--del 关闭指定的服务程序
--list 列出chkconfig所知道的所有服务
选择参数
--level<代号> 设置服务程序的等级代号,它是一串0~7的数字,如“-level35”代表指定运行等级3和5
--help 显示帮助信息
--version 显示版本信息
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
等级代号说明:
- 等级0表示:表示关机
- 等级1表示:单用户模式
- 等级2表示:无网络连接的多用户命令行模式
- 等级3表示:有网络连接的多用户命令行模式
- 等级4表示:不可用
- 等级5表示:带图形界面的多用户模式
- 等级6表示:重新启动
04. 参考示例
4.1 列出所有的系统服务
[deng@localhost ~]$ chkconfig --list
注:该输出结果只显示 SysV 服务,并不包含
原生 systemd 服务。SysV 配置数据
可能被原生 systemd 配置覆盖。
要列出 systemd 服务,请执行 'systemctl list-unit-files'。
查看在具体 target 启用的服务请执行
'systemctl list-dependencies [target]'。
netconsole 0:关 1:关 2:关 3:关 4:关 5:关 6:关
network 0:关 1:关 2:开 3:开 4:开 5:开 6:关
vmware-tools 0:关 1:关 2:开 3:开 4:开 5:开 6:关
vmware-tools-thinprint 0:关 1:关 2:开 3:开 4:开 5:开 6:关
[deng@localhost ~]$
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
4.2 增加network服务
[root@localhost ~]# chkconfig --add network
- 1
- 2
–add 增加所指定的系统服务,让chkconfig指令得以管理它,并同时在系统启动的叙述文件内增加相关数据
4.3 删除network服务
[root@localhost ~]# chkconfig --del network
- 1
- 2
–del 删除所指定的系统服务,不再由chkconfig指令管理,并同时在系统启动的叙述文件内删除相关数据
4.4 设置network在运行级别为2、3、4、5的情况下都是on(开启)的状态
[root@localhost ~]# chkconfig --level 2345 network on
- 1
- 2
4.5 设置network在运行级别为2、3、4、5的情况下都是off(关闭)的状态
[root@localhost ~]# chkconfig --level 2345 network off
- 1
- 2
4.6 查看network服务状态
[root@localhost ~]# chkconfig --list network
注:该输出结果只显示 SysV 服务,并不包含
原生 systemd 服务。SysV 配置数据
可能被原生 systemd 配置覆盖。
要列出 systemd 服务,请执行 'systemctl list-unit-files'。
查看在具体 target 启用的服务请执行
'systemctl list-dependencies [target]'。
network 0:关 1:关 2:开 3:开 4:开 5:开 6:关
[root@localhost ~]#
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
4.7 设置network在运行级别为2、3、4、5的情况下都是on(开启)的状态
[root@localhost ~]# chkconfig network on
[root@localhost ~]# chkconfig --list
注:该输出结果只显示 SysV 服务,并不包含
原生 systemd 服务。SysV 配置数据
可能被原生 systemd 配置覆盖。
要列出 systemd 服务,请执行 'systemctl list-unit-files'。
查看在具体 target 启用的服务请执行
'systemctl list-dependencies [target]'。
netconsole 0:关 1:关 2:关 3:关 4:关 5:关 6:关
network 0:关 1:关 2:开 3:开 4:开 5:开 6:关
vmware-tools 0:关 1:关 2:开 3:开 4:开 5:开 6:关
vmware-tools-thinprint 0:关 1:关 2:开 3:开 4:开 5:开 6:关
[root@localhost ~]#

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
4.8 设置network在运行级别为2、3、4、5的情况下都是off(关闭)的状态
[root@localhost ~]# chkconfig network off
[root@localhost ~]# chkconfig --list network
注:该输出结果只显示 SysV 服务,并不包含
原生 systemd 服务。SysV 配置数据
可能被原生 systemd 配置覆盖。
要列出 systemd 服务,请执行 'systemctl list-unit-files'。
查看在具体 target 启用的服务请执行
'systemctl list-dependencies [target]'。
network 0:关 1:关 2:关 3:关 4:关 5:关 6:关
[root@localhost ~]#
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
05. 总结
06. 附录
概述
功能简介
GPIO(General-purpose input/output)即通用型输入输出。通常,GPIO控制器通过分组的方式管理所有GPIO管脚,每组GPIO有一个或多个寄存器与之关联,通过读写寄存器完成对GPIO管脚的操作。
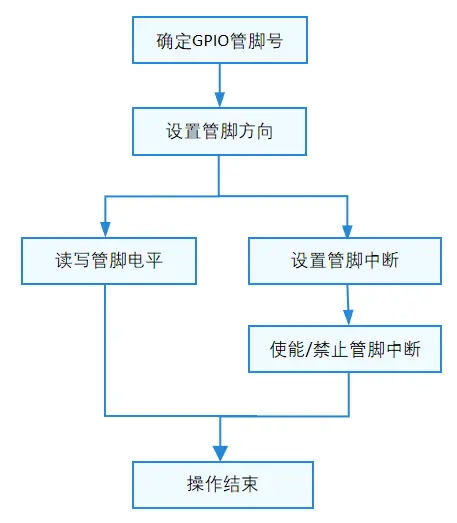
GPIO接口定义了操作GPIO管脚的标准方法集合,包括:
-
设置、获取管脚方向:方向可以是输入或者输出(暂不支持高阻态)。
-
读、写管脚电平值:电平值可以是低电平或高电平。
-
设置、取消管脚中断服务函数:设置一个管脚的中断响应函数,以及中断触发方式。取消一个管脚的中断服务函数。
-
使能、禁止管脚中断:禁止或使能管脚中断。
基本概念
GPIO又俗称为I/O口,I指的是输入(in),O指的是输出(out)。可以通过软件来控制其输入和输出,即I/O控制。
- GPIO输入
输入是检测各个引脚上的电平状态,高电平或者低电平状态。常见的输入模式有:模拟输入、浮空输入、上拉输入、下拉输入。
- GPIO输出
输出是当需要控制引脚电平的高低时需要用到输出功能。常见的输出模式有:开漏输出、推挽输出、复用开漏输出、复用推挽输出。
运作机制
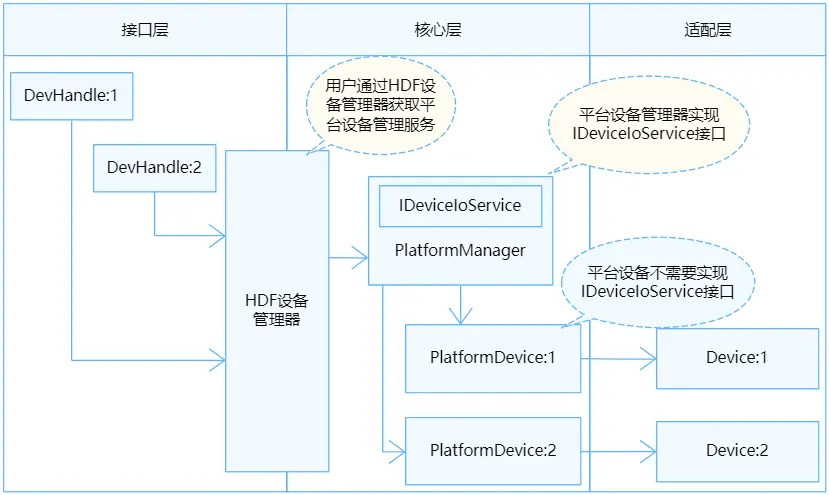
在HDF框架中,同类型设备对象较多时(可能同时存在十几个同类型配置器),若采用独立服务模式,则需要配置更多的设备节点,且相关服务会占据更多的内存资源。相反,采用统一服务模式可以使用一个设备服务作为管理器,统一处理所有同类型对象的外部访问(这会在配置文件中有所体现),实现便捷管理和节约资源的目的。GPIO模块接口适配模式采用统一服务模式(如图1所示)。
在统一模式下,所有的控制器都被核心层统一管理,并由核心层统一发布一个服务供接口层,因此这种模式下驱动无需再为每个控制器发布服务。
GPIO模块各分层作用:
- 接口层提供操作GPIO管脚的标准方法。
- 核心层主要提供GPIO管脚资源匹配,GPIO管脚控制器的添加、移除以及管理的能力,通过钩子函数与适配层交互,供芯片厂家快速接入HDF框架。
- 适配层主要是将钩子函数的功能实例化,实现具体的功能。
图 1 GPIO统一服务模式结构图
使用指导
场景介绍
GPIO主要是对GPIO管脚资源进行管理。开发者可以使用提供的GPIO操作接口,实现对管脚控制的具体控制。
接口说明
GPIO模块提供的主要接口如表1所示。具体API详见//drivers/hdf_core/framework/include/platform/gpio_if.h。
表 1 GPIO驱动API接口功能介绍
class="table-box">| 接口名 | 描述 |
|---|---|
| GpioGetByName(const char *gpioName) | 获取GPIO管脚ID |
| int32_t GpioRead(uint16_t gpio, uint16_t *val) | 读GPIO管脚电平值 |
| int32_t GpioWrite(uint16_t gpio, uint16_t val) | 写GPIO管脚电平值 |
| int32_t GpioGetDir(uint16_t gpio, uint16_t *dir) | 获取GPIO管脚方向 |
| int32_t GpioSetDir(uint16_t gpio, uint16_t dir) | 设置GPIO管脚方向 |
| int32_t GpioUnsetIrq(uint16_t gpio, void *arg) | 取消GPIO管脚对应的中断服务函数 |
| int32_t GpioSetIrq(uint16_t gpio, uint16_t mode, GpioIrqFunc func, void *arg) | 设置GPIO管脚对应的中断服务函数 |
| int32_t GpioEnableIrq(uint16_t gpio) | 使能GPIO管脚中断 |
| int32_t GpioDisableIrq(uint16_t gpio) | 禁止GPIO管脚中断 |

 class="blog_extension_card_cont">
class="blog_extension_card_cont">


评论记录:
回复评论: