class="hide-preCode-box">
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 pwm_config.hcs 配置参考 root {
platform {
pwm_config {
template pwm_device { // 【必要】配置模板,如果下面节点使用时继承该模板,则节点中未声明的字段会使用该模板中的默认值
serviceName = "";
match_attr = "";
num = 0; // 【必要】设备号
base = 0x12070000; // 【必要】地址映射需要
}
device_0x12070000 :: pwm_device { // 存在多个设备时,请逐一添加相关HDF节点和设备节点信息。
match_attr = "hisilicon_hi35xx_pwm_0"; // 【必要】需要和device_info.hcs中的deviceMatchAttr值一致
}
device_0x12070020 :: pwm_device {
match_attr = "hisilicon_hi35xx_pwm_1";
num = 1;
base = 0x12070020; // 【必要】地址映射需要
}
...... // 如果存在多个PWM设备时【必须】添加节点,否则不用
}
}
}
c
class="hljs-button signin active" data-title="登录复制" data-report-click="{"spm":"1001.2101.3001.4334"}"> class="hide-preCode-box">1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 需要注意的是,新增pwm_config.hcs配置文件后,必须在产品对应的hdf.hcs文件中将其包含如下语句所示,否则配置文件无法生效。
#include "../../../../device/soc/hisilicon/hi3516dv300/sdk_liteos/hdf_config/pwm/pwm_config.hcs" // 配置文件相对路径
c
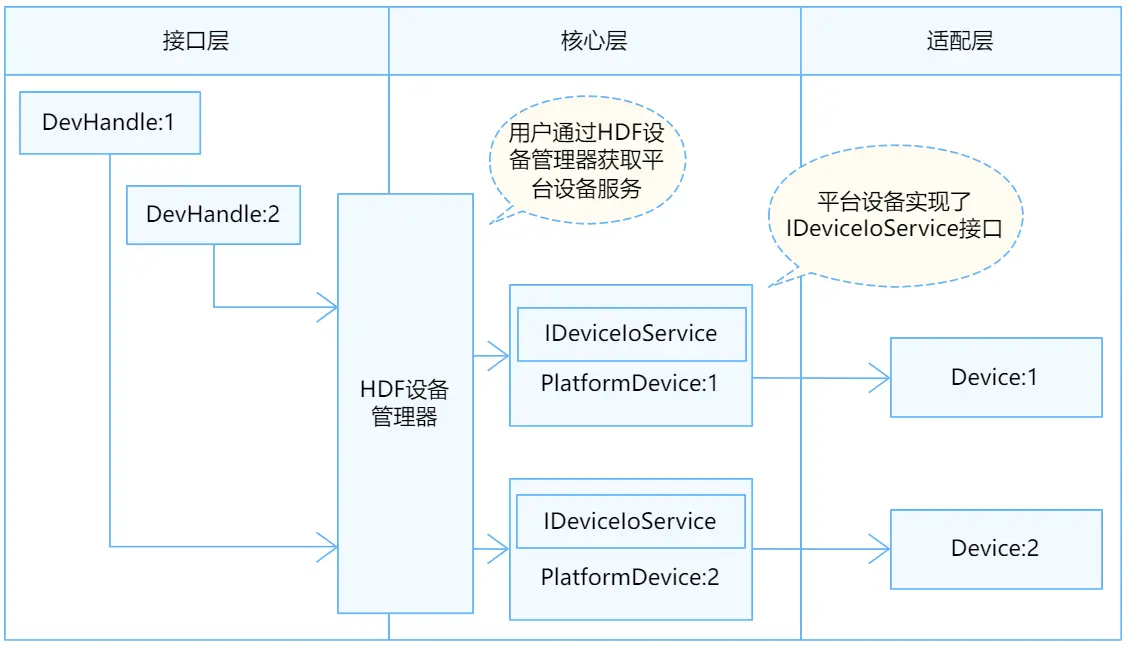
class="hljs-button signin active" data-title="登录复制" data-report-click="{"spm":"1001.2101.3001.4334"}">实例化PWM控制器对象 完成驱动入口注册之后,下一步就是以核心层PwmDev对象的初始化为核心,包括驱动适配者自定义结构体(传递参数和数据),实例化PwmDev成员PwmMethod(让用户可以通过接口来调用驱动底层函数),实现HdfDriverEntry成员函数(Bind、Init、Release)。
从驱动的角度看,驱动适配者自定义结构体是参数和数据的载体,而且pwm_config.hcs文件中的数值会被HDF读入并通过DeviceResourceIface来初始化结构体成员,一些重要数值也会传递给核心层对象,例如PWM设备号。
struct HiPwm {
struct PwmDev dev; // 【必要】 核是核心层控制对象
volatile unsigned char *base; // 【必要】地址映射需要,寄存器基地址
struct HiPwmRegs *reg; // 设备属性结构体,可自定义。
bool supportPolarity; // 是否支持极性
};
struct PwmDev { // PwmDev是核心层控制器结构体,其中的成员在Init函数中会被赋值。
struct IDeviceIoService service; // 驱动服务
struct HdfDeviceObject *device; // 驱动设备对象
struct PwmConfig cfg; // 设备属性结构体,相关定义见下。
struct PwmMethod *method; // 钩子函数
bool busy; // 是否繁忙
uint32_t num; // 设备号
OsalSpinlock lock; // 自旋锁
void *priv; // 私有数据
};
struct PwmConfig { // PWM设备属性
uint32_t duty; // 占空时间 nanoseconds
uint32_t period; // pwm 周期 nanoseconds
uint32_t number; // pwm 连续个数
uint8_t polarity; // Polarity
// ------------------- | --------------
// PWM_NORMAL_POLARITY | Normal polarity
// PWM_INVERTED_POLARITY | Inverted polarity
//
uint8_t status; // 运行状态
// ------------------ | -----------------
// PWM_DISABLE_STATUS | Disabled
// PWM_ENABLE_STATUS | Enabled
};
c
```
* PwmDev成员钩子函数结构体PwmMethod的实例化,其他成员在Init函数中初始化。
```
struct PwmMethod g_pwmOps = { // pwm_hi35xx.c中的示例:钩子函数实例化
.setConfig = HiPwmSetConfig, // 配置属性
};
c
class="hljs-button signin active" data-title="登录复制" data-report-click="{"spm":"1001.2101.3001.4334"}"> class="hide-preCode-box">1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 入参:
HdfDeviceObject:HDF框架给每一个驱动创建的设备对象,用来保存设备相关的私有数据和服务接口。
返回值:
HDF_STATUS相关状态(表3为部分展示,如需使用其他状态,可参考//drivers/hdf_core/interfaces/inner_api/utils/hdf_base.h中HDF_STATUS定义)。
表 3 HDF_STATUS相关状态说明
class="table-box">状态(值) 问题描述 HDF_ERR_INVALID_OBJECT 控制器对象非法 HDF_ERR_MALLOC_FAIL 内存分配失败 HDF_ERR_INVALID_PARAM 参数非法 HDF_ERR_IO I/O 错误 HDF_SUCCESS 初始化成功 HDF_FAILURE 初始化失败
函数说明:
初始化自定义结构体对象,初始化PwmDev成员,调用核心层PwmDeviceAdd函数,完成PWM控制器的添加。
// 此处Bind函数为空函数,可与Init函数结合,也可根据驱动适配者需要实现相关操作。
static int32_t HdfPwmBind(struct HdfDeviceObject *obj)
{
(void)obj;
return HDF_SUCCESS;
}
static int32_t HdfPwmInit(struct HdfDeviceObject *obj)
{
int ret;
struct HiPwm *hp = NULL;
......
hp = (struct HiPwm *)OsalMemCalloc(sizeof(*hp));
......
ret = HiPwmProbe(hp, obj); // 【必要】实现见下
......
return ret;
static int32_t HiPwmProbe(struct HiPwm *hp, struct HdfDeviceObject *obj)
{
uint32_t tmp;
struct DeviceResourceIface *iface = NULL;
iface = DeviceResourceGetIfaceInstance(HDF_CONFIG_SOURCE); // 初始化自定义结构体HiPwm
......
hp->reg = (struct HiPwmRegs *)hp->base; // 初始化自定义结构体HiPwm
hp->supportPolarity = false; // 初始化自定义结构体HiPwm
hp->dev.method = &g_pwmOps; // PwmMethod的实例化对象的挂载
hp->dev.cfg.duty = PWM_DEFAULT_DUTY_CYCLE; // 初始化PwmDev
hp->dev.cfg.period = PWM_DEFAULT_PERIOD; // 初始化PwmDev
hp->dev.cfg.polarity = PWM_DEFAULT_POLARITY; // 初始化PwmDev
hp->dev.cfg.status = PWM_DISABLE_STATUS; // 初始化PwmDev
hp->dev.cfg.number = 0; // 初始化PwmDev
hp->dev.busy = false; // 初始化PwmDev
if (PwmDeviceAdd(obj, &(hp->dev)) != HDF_SUCCESS) { // 【重要】调用核心层函数,初始化hp->dev的设备和服务。
OsalIoUnmap((void *)hp->base);
return HDF_FAILURE;
}
return HDF_SUCCESS;
}
c
class="hljs-button signin active" data-title="登录复制" data-report-click="{"spm":"1001.2101.3001.4334"}"> class="hide-preCode-box">1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 入参:
HdfDeviceObject:HDF框架给每一个驱动创建的设备对象,用来保存设备相关的私有数据和服务接口。
返回值:
无。
函数说明:
释放内存和删除控制器,该函数需要在驱动入口结构体中赋值给Release接口,当HDF框架调用Init函数初始化驱动失败时,可以调用Release释放驱动资源。
static void HdfPwmRelease(struct HdfDeviceObject *obj)
{
struct HiPwm *hp = NULL;
......
hp = (struct HiPwm *)obj->service; // 这里有HdfDeviceObject到HiPwm的强制转化
......
PwmDeviceRemove(obj, &(hp->dev)); // 【必要】调用核心层函数,释放PwmDev的设备和服务,这里有HiPwm到PwmDev的强制转化。
HiPwmRemove(hp); // 释放HiPwm
}
c
class="hljs-button signin active" data-title="登录复制" data-report-click="{"spm":"1001.2101.3001.4334"}">驱动调试 【可选】针对新增驱动程序,建议验证驱动基本功能,例如PWM控制状态等。
如果大家想更加深入的学习 OpenHarmony(鸿蒙南向) 开发的全栈内容,不妨可以参考以下相关学习文档进行学习,助你快速提升自己:
搭建开发环境 Windows 开发环境的搭建 Ubuntu 开发环境搭建 Linux 与 Windows 之间的文件共享 …… 构建子系统 启动流程 子系统 分布式任务调度子系统 分布式通信子系统 驱动子系统 ……
如果你觉得这篇内容对你还蛮有帮助,我想邀请你帮我三个小忙: 点赞,转发,有你们的 『点赞和评论』,才是我创造的动力。 关注小编,同时可以期待后续文章ing🚀,不定期分享原创知识。 想要获取更多完整鸿蒙最新学习资源,请移步前往小编:https://qr21.cn/FV7h05
data-report-view="{"mod":"1585297308_001","spm":"1001.2101.3001.6548","dest":"https://blog.csdn.net/maniuT/article/details/141036129","extend1":"pc","ab":"new"}">>
鸿蒙开发学习资料领取!!!
class="blog_extension_card_cont_r">
微信名片


 class="blog_extension_card_cont">
class="blog_extension_card_cont">


评论记录:
回复评论: