
00. 目录
01. 命令概述
pidof命令用于查找指定名称的进程的进程号。
02. 命令格式
格式:pidof [选项] [参数]
- 1
03. 常用选项
-s:仅返回一个进程号;
-c:仅显示具有相同“root”目录的进程;
-x:显示由脚本开启的进程;
-o:指定不显示的进程ID。
- 1
- 2
- 3
- 4
04. 参考示例
4.1 查看指定进程的进程号
[deng@itcast ~]$ pidof bash
91509 86546 698
[deng@itcast ~]$
- 1
- 2
- 3
4.2 仅显示一个进程号
[deng@itcast ~]$ pidof -s bash
91509
[deng@itcast ~]$
- 1
- 2
- 3
4.3 显示由脚本开启的进程
[deng@itcast ~]$ pidof -x /bin/bash
91509 86546
[deng@itcast ~]$
- 1
- 2
- 3
4.4 显示具有相同根目录的进程
[deng@itcast ~]$ pidof -c bash
91509 86546 698
[deng@itcast ~]$
- 1
- 2
- 3
4.5 指定不显示进程ID
[deng@itcast ~]$ pidof bash
91509 86546 698
[deng@itcast ~]$ pidof -o 698 bash
91509 86546
[deng@itcast ~]$
- 1
- 2
- 3
- 4
- 5
05. 附录
3、MMU汇编代码
在arch\arm\arm\include\arm.h文件中,封装了CP15协处理器相关的寄存器操作汇编函数。我们主要看下MMU相关的部分。
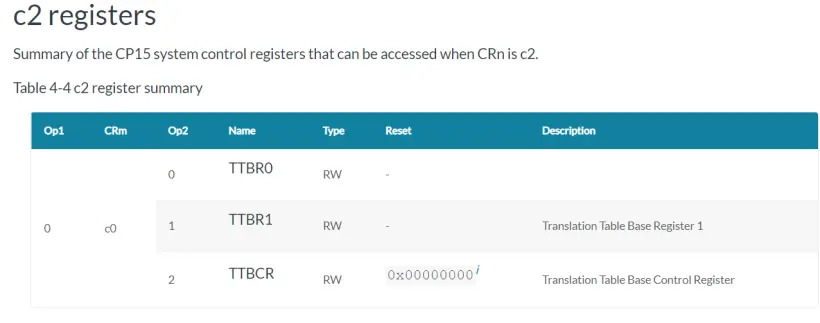
3.1 CP15 C2 TTBR转换表基地址寄存器
代码比较简单,结合下图,自行查看即可。该图来自《ARM Cortex-A9 Technical Reference Manual r4p1》CP15 system control registers grouped by CRn order部分。
STATIC INLINE UINT32 OsArmReadTtbr(VOID)
{
UINT32 val;
__asm__ volatile("mrc p15, 0, %0, c2,c0,0" : "=r"(val));
return val;
}
STATIC INLINE VOID OsArmWriteTtbr(UINT32 val)
{
__asm__ volatile("mcr p15, 0, %0, c2,c0,0" ::"r"(val));
__asm__ volatile("isb" ::: "memory");
}
STATIC INLINE UINT32 OsArmReadTtbr0(VOID)
{
UINT32 val;
__asm__ volatile("mrc p15, 0, %0, c2,c0,0" : "=r"(val));
return val;
}
STATIC INLINE VOID OsArmWriteTtbr0(UINT32 val)
{
__asm__ volatile("mcr p15, 0, %0, c2,c0,0" ::"r"(val));
__asm__ volatile("isb" ::: "memory");
}
STATIC INLINE UINT32 OsArmReadTtbr1(VOID)
{
UINT32 val;
__asm__ volatile("mrc p15, 0, %0, c2,c0,1" : "=r"(val));
return val;
}
STATIC INLINE VOID OsArmWriteTtbr1(UINT32 val)
{
__asm__ volatile("mcr p15, 0, %0, c2,c0,1" ::"r"(val));
__asm__ volatile("isb" ::: "memory");
}
STATIC INLINE UINT32 OsArmReadTtbcr(VOID)
{
UINT32 val;
__asm__ volatile("mrc p15, 0, %0, c2,c0,2" : "=r"(val));
return val;
}
STATIC INLINE VOID OsArmWriteTtbcr(UINT32 val)
{
__asm__ volatile("mcr p15, 0, %0, c2,c0,2" ::"r"(val));
__asm__ volatile("isb" ::: "memory");
}
class="hljs-button signin active" data-title="登录复制" data-report-click="{"spm":"1001.2101.3001.4334"}">
 class="blog_extension_card_cont">
class="blog_extension_card_cont">


评论记录:
回复评论: