
1. 源由
飞控图传不是简简单单的IPC摄像头。
虽然这个东东就是摄像头改过来的,工作在实时图像(~40ms)。除此之外,还能用于无线电传,用于电传报文的传输,以便地面端了解飞控工作状态。
注:后续应该还会有IMU传感方面的信息集成。
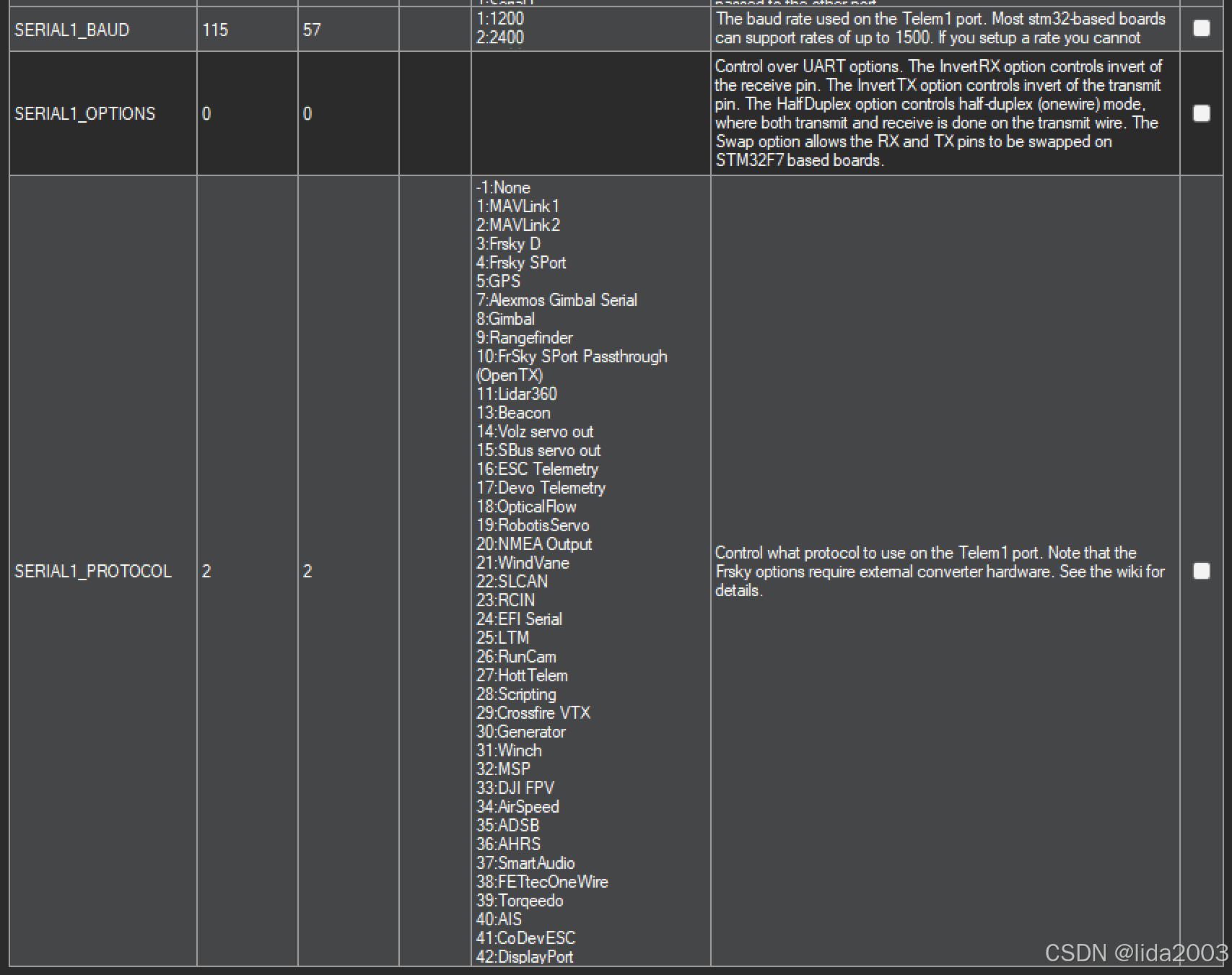
当前,默认OpenIPC是对串口配置的是MAVLink协议。Ardupilot固件在开源无人机方面是做的比较完善的,所以这里用于验证上述功能。
2. 准备
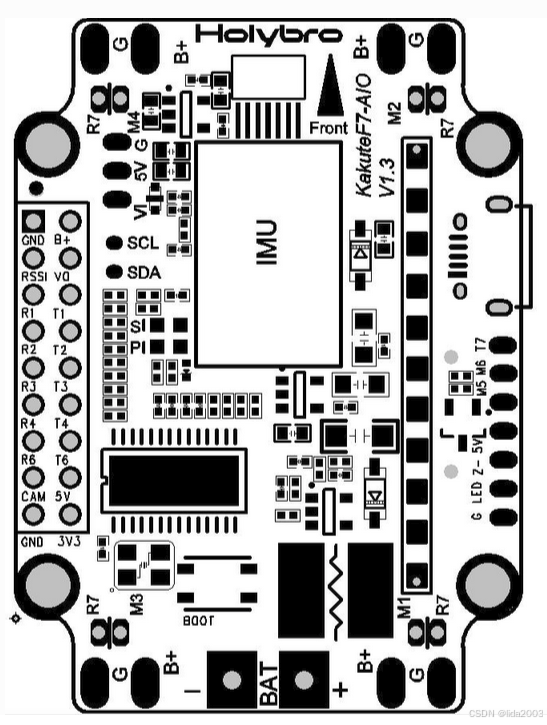
- 选择Ardupilot飞控:笔者这里有一块 Holybro Kakute F7 and KAKUTE F7 AIO。
- 烧录Ardupilot固件
toFC:
- pin1: VCC(7.4~26V) ---- FC VBat+
- pin2: GND ------------- FC GND
- pin3: UART_RX1 -------- FC T1
- pin4: UART_TX1 -------- FC R1
- pin5: GND ------------- FC GND
- 1
- 2
- 3
- 4
- 5
- 6
3. 连接
略,参考
4. 安装
略, 参考以下资料:
wfb-ng传输层软件安装
QGroundControl编译安装
5. 配置
之前有不少这块板子的测试及验证,均使用到配置工具Mission Planner,相关工具的使用方法,请查阅:
【1】ArduPilot飞控之DIY-F450计划
【2】ArduPilot Kakute F7 AIO DIYF450 without GPS配置
【3】ArduPilot Kakute F7 AIO DIYF450 之GPS配置
6. 测试
6.1 启动wfb-ng服务
$ sudo systemctl start wifibroadcast@gs
- 1
6.2 启动wfb-ng监测
$ wfb-cli gs
- 1
6.3 启动QGroundControl
$ ./build/QGroundControl
- 1
6.4 观察测试结果
- MAVLink报文收到,且持续稳定
- QGroundControl(配置UDP14550),飞控会自动 连接上
如果上述情况都正常,证明MAVLink设置及硬件正常,参考视频。
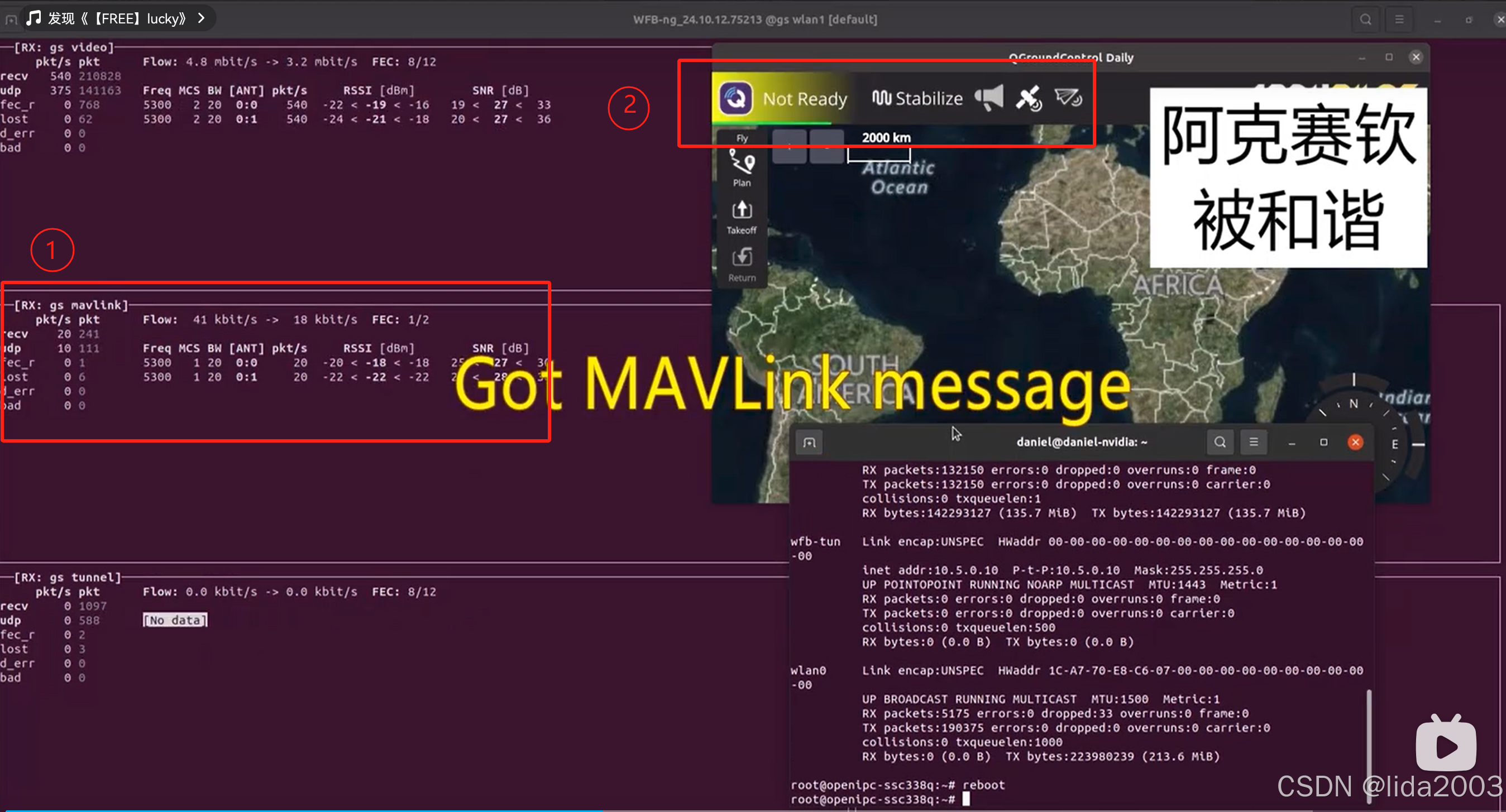
- Video视频报文收到,且持续稳定
进一步确认《Open FPV VTX开源之第一次出图》正常。
7. 总结
本章主要提供了一个验证Open FPV VTX开源之默认MAVLink设置测试硬件的方法。
实际手头拿到的产品(由于软件或者硬件问题导致)呈现概率性失败:
大概率是软件稳定性问题,但是也不排除硬件问题。
总的来说,更新固件通常是一个常规办法,但是为了更好的复现和确认,我们本次不做更新验证。
对于开源软件来说,需要一定的DIY方法,如果能够有这方面工程技术定位问题的经验,也请大家多多支持开源社区。
8. 参考资料
【1】Open FPV VTX开源之硬件规格及组成
【2】Open FPV VTX开源之第一次出图
9. 补充
9.1 telemetry_tx异常
telemetry_tx 进程会出现自动退出,进而导致MAVLink地面站软件无法收到报文。
做了如下排列组合,都有概率性失败:
测试:
- 接有线网口 + 接DEBUG串口 ==> NG;3次
- 接有线网口 + 无DEBUG串口 ==> NG;3次
- 无有线网口 + 无DEBUG串口 ==> NG;3次,成功1次
- 无有线网口 + 接DEBUG串口 ==> NG;3次,成功1次
OpenIPC S30KQ telemetry
9.2 DEBUG串口部分乱码
当有线网口与路由器连接的时候,DEBUG串口会出现部分乱码情况。若网线拔掉,一切正常。
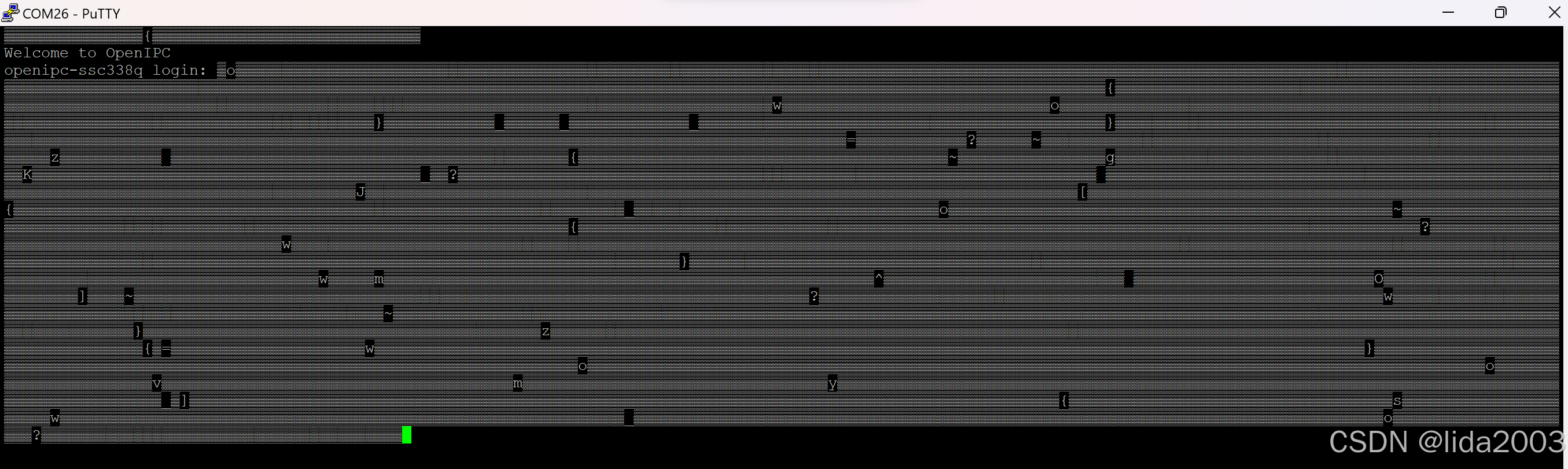
注:正常日志详见:Open FPV VTX开源之第一次出图。
9.3 PixelPilot软件问题
发现PixelPilot软件有的时候,偶尔能够正确解析MAVLink报文,此时pitch、roll等可以正常显示,若反动飞控,值会随之变化。但是大部分情况不行,可能是软件BUG。
评论记录:
回复评论: