
一.前言
记录自己在实现这个流程遇到的各种问题,因为我也是看了许多优质的文章以及组内大佬的帮助下才弄成的,这里推荐一个大佬的文章,写的非常优秀,比我这篇文章写得好得很多,最后我也是看这个大佬的代码最终才实现的,特别鸣谢。看这篇文章前提你得足够的了解AD,kerberos,ldap等,CSDN这类文章就很多,我就不献丑了。
LDAP/SASL/GSSAPI/Kerberos编程API(2)--krb5客户端
LDAP/SASL/GSSAPI/Kerberos编程API(3)--LDAP/SASL
不止这两篇,大佬很详细可自行查看
二,环境支持
AD服务器:Windows server 2022 中文版
Linux:ubuntu 20
openldap:sudo apt-get install libldap-dev //代码所需要的ldap.h
GSSAPI支持:sudo apt-get install libsasl2-modules-gssapi-mit //使LDAP支持GSSAPI认证,kerberos属于GSSAPI认证方式之一,否则运行时会出现下面报错。
krb5环境支持:sudo apt-get install krb5-user //krb5API的调用,因为kerberos认证过程中产生的TGT票据是我们手动调用API实现的 ,而并非使用kinit生成。
三,API详解
1.生成TGT票据
因为我写的是公司项目代码,不可以拿出来,我就直接引用前言大佬的代码了,冒犯还请联系我删除。各个API的功能和参数作用我都写在代码块中了,注释是我加的,代码是大佬的。
大致流程:1.初始化安全的上下文->2.使用用户名,密码换区TGT->3.通过TGT换区票据
- #include
- #include
- #include
- #include
-
- //krb5_get_init_creds_password函数所使用的回调函数,这个函数必须返回成功值 LDAP_SUCCESS,否则基本都失败,因为我通过循环试了1000值。不需要了解他的功能,我猜测的是这个函数能够在我们进行最后的bind之前进行其他的判断,如果失败不返回LDAP_SUCCESS,作为最后一道屏障
- static int _ldap_sasl_interact( )
- { return LDAP_SUCCESS;
- }
-
- int main()
- {
- krb5_context context = NULL;
- krb5_error_code krberr;
- krb5_principal kprincpw = NULL;
- krb5_creds * my_creds_ptr = NULL;
- krb5_creds my_creds;
- const char * errmsg;
- //初始化一个安全的上下文,后续的操作都是基于context,可以把他看成是基石
- krberr = krb5_init_context(&context);
- if (krberr) {
- //这个API能够解析错误码,分析出特定的错误信息,将其存储在errmsg中,然后打印到终端查看
- errmsg = krb5_get_error_message(NULL, krberr);
- printf("Err: Kerberos context initialization failed -> %s\n", errmsg);
- goto cleanup;
- }
- //这个API是你用户的信息(第二个参数)转化成krb中的格式存储在kprincpw中
- 用户信息的组成"<认证的用户名>@
" - krberr = krb5_parse_name(context, "[email protected]", &kprincpw);
- if (krberr) {
- errmsg = krb5_get_error_message(context, krberr);
- printf("Err: Failed to parse princpal %s -> %s\n", errmsg);
- goto cleanup;
- }
-
- //用户的密码,哈哈,这个谁都看得出来吧
- const char *password="linlin";
- printf("begin get init creds password\n");
- //使用用户的信息,密码换取TGT票据,并且拿到将凭证放my_creds中,但是这个凭证不是TGT,而是最后一次认证使用的
- krberr = krb5_get_init_creds_password(context, &my_creds,kprincpw, (char *)password,NULL,NULL,0,NULL,NULL);
-
- if (krberr) {
- errmsg = krb5_get_error_message(context, krberr);
- printf("Err: Failed to get init creds password -> %s\n", errmsg);
- goto cleanup;
- }
- // my_creds_ptr = &my_creds;
- printf("get init creds password OK\n");
-
-
- //--v
- krb5_ccache ccache = NULL;
-
- //从内存中获取TGT票据,将其放入到ccache的变量中,便于后面换取TGS票据,就是服务器的最终通行证
- krberr = krb5_cc_resolve(context, "MEMORY:dhcp_ld_krb5_cc", &ccache);
- //从/tmp/krb5cc_1000中获取TGT票据,这个文件是自动生成的,将其存储到ccache中便于后面换取TGS票据,安全性上看来,确实没有从内存中获取TGT票据更安全,因为这个是可视化的,你甚至可以自己打开查看
- //krberr = krb5_cc_resolve(context, "FILE:/tmp/krb5cc_1000", &ccache);
- if (krberr) {
- errmsg = krb5_get_error_message(context, krberr);
- printf("Err: Couldnt resolve ccache -> %s\n", errmsg);
- goto cleanup;
- }
-
- //初始化ccache,相当于清空,但是你的ccache却不能是空的,我怀疑这个函数内存做的处理是,先是利用ccache中存储的TGT票据生成TGS服务票据,然后再清空。这里也能看见API还指定了用户名,说明生成的TGS是有对应关系的。
- krberr = krb5_cc_initialize(context, ccache, kprincpw);
- if (krberr) {
- errmsg = krb5_get_error_message(context, krberr);
- printf("Err: Failed to init ccache -> %s\n", errmsg);
- goto cleanup;
- }
- //这个函数的作用我是有点迷的,这里又将my_creds的凭据放到ccache中又进行了一次认证,因为kerberos的认证是繁琐的,多次认证,我暂且这样理解吧,因为通过抓包发现也是进行了多次response
- krberr = krb5_cc_store_cred(context, ccache, &my_creds);
- if (krberr) {
- errmsg = krb5_get_error_message(context, krberr);
- printf("Err: Failed to store credentials -> %s\n", errmsg);
- goto cleanup;
- }
- printf("Successfully store creds\n");

2.将LDAP句柄指针和用户信息绑定
因为后续需要使用LDAP协议去管理AD服务器,例如增删改查用户的信息,例如我就进行了搜索用户邮箱的操作,这里没看大佬代码,因为我觉得我的更利于直观理解。
- LDAP *ld;
- int rc;
- unsigned long version = LDAP_VERSION3; //使用LDAP的v3版本
-
- //初始化一个LDAP句柄指针ld,后面的操作全是基于LDAP句柄指针,和上分的context差不多
- if (( rc = ldap_initialize(&ld,"ldap://192.168.1.11/")) != LDAP_SUCCESS) //#12
- //if (( rc = ldap_initialize(&ld,"ldap://127.0.0.1/")) != LDAP_SUCCESS)
- {
- return(1);
- }
- //与服务器协商使用V3版本吗
- rc = ldap_set_option(ld,LDAP_OPT_PROTOCOL_VERSION,(void*)&version);
-
- //除了第6个参数其他都可以默认,第六个参数就是上分提到返回LDAP_SUCCESS的回调函数,这里大佬的代码是有一点问题的,因为它回调函数是返回int类型的,然而这里的参数的数据类型是一个宏定义,我这里看不了,下次补充进来,最后解决办法是将回调函数的返回类型换成这个宏定义,最后转换一下就行了。到这里就bind成功了,完成第四步的配置文件后,可以进行增删改查了
- if ((rc=ldap_sasl_interactive_bind_s(ld,NULL,"GSSAPI",NULL,NULL,LDAP_SASL_AUTOMATIC, _ldap_sasl_interact,NULL) ) != LDAP_SUCCESS)
- { printf ("Error: %s\n",ldap_err2string (rc));
- char *msg=NULL;
- ldap_get_option( ld, LDAP_OPT_DIAGNOSTIC_MESSAGE, (void*)&msg);
- printf ("Additional info: %s\n", msg);
- ldap_memfree(msg);
- return(1);
- }
-
- LDAPMessage *res;
- if ((rc=ldap_search_ext_s(ld,"",LDAP_SCOPE_ONELEVEL,NULL,NULL,0,NULL,NULL,NULL,0,&res)!=LDAP_SUCCESS))
- { printf("ldap_search failed with 0x%x.\n",rc);
- return(1);
- }
- printf("Success!\n");
- LDAPMessage *entry = ldap_first_entry( ld, res );
- int entry_count = ldap_count_entries(ld, res);
- for (int i = 0 ; i < entry_count; i++)
- { printf("dn: %s\n",ldap_get_dn(ld, entry));
- BerElement * ber;
- char * attribute = ldap_first_attribute(ld,entry, &ber);
- while(attribute)
- { printf ("attribute = %s\n",attribute);
- attribute = ldap_next_attribute(ld,entry, ber);
- }
- ber_free(ber,0);
- entry = ldap_next_entry(ld, entry);
- }
- //--^--
-
- cleanup:
- if (ccache) krb5_cc_close(context, ccache); //#13
- if (kprincpw) krb5_free_principal(context, kprincpw);
- if (my_creds_ptr) krb5_free_cred_contents(context, &my_creds);
- if (context) krb5_free_context(context);
-
- return 0;
- }
四:环境的配置
第1步.在/etc/krb5.conf中添加服务器对应的信息(ubuntu)
- [libdefaults]
- default_realm = TEST.ORG //TEST.ORG 你的服务器域名,大写
- dns_lookup_realm = false
- dns_lookup_kdc = false
- ticket_lifetime = 24h
- renew_lifetime = 7d
- forwardable = true
- [realms]
- TEST.ORG = { //填充你TEST.ORG的模块信息
- kdc = 192.168.45.141 //kdc的IP,在AD中,是集成在一块,填AD的IP即可
- admin_server = 192.168.45.141 //与kdc同理
- default_domain=TEST.ORG //可填可不填
- }
-
- [domain_realm] //这个模块的信息可填可不填
- .test.org = TEST.ORG
- test.org = TEST.ORG
第2步.在/etc/hosts文件中添加KDC主机名和KDC所在域名(ubuntu)
27.0.0.1 localhost
127.0.1.1 ubuntu.test.org ubuntu192.168.45.xxx DC.TEST.ORG #红色为添加信息,前面填充kdc IP ,后面填写 服务器主机名.域名 例如我的主机名为DC,域名为TEST.ORG
# The following lines are desirable for IPv6 capable hosts
::1 ip6-localhost ip6-loopback
fe00::0 ip6-localnet
ff00::0 ip6-mcastprefix
ff02::1 ip6-allnodes
ff02::2 ip6-allrouters
如果第1步不配置,会找不到服务器;
如果第2步不配置,会出现下列错误:SASL(-1): generic failure: GSSAPI Error: Unspecified GSS failure. Minor code may provide more information (Server not found in Kerberos database)
同时你也可以在AD中添加DNS反向查询解决这个错误,而不修改/etc/hosts,当然这是用在用户基数很大的情况下,改变AD服务器可以一劳永逸,详情查看第3步。
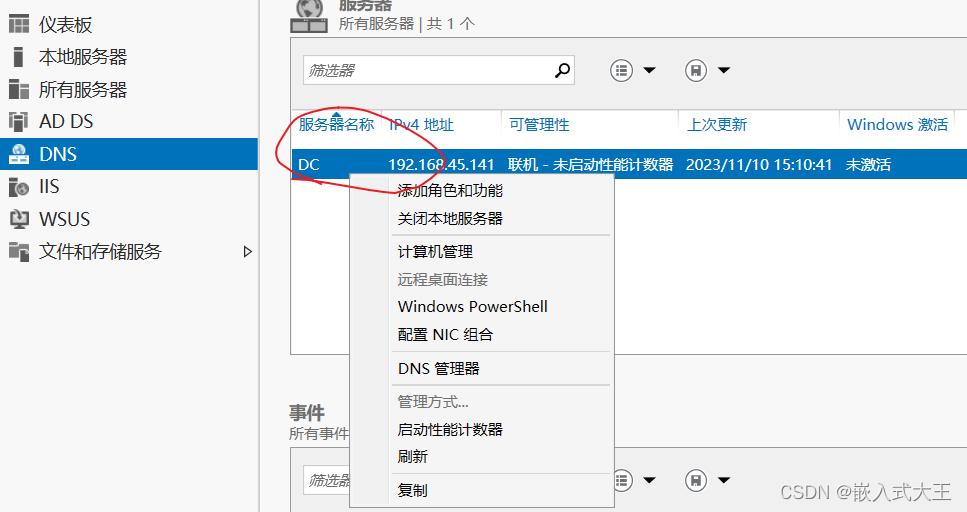
第3步 为AD服务器添加DNS反向查询解决这个错误
3.1进入服务管理器,找到DNS,右击右侧服务器,进入DNS管理器
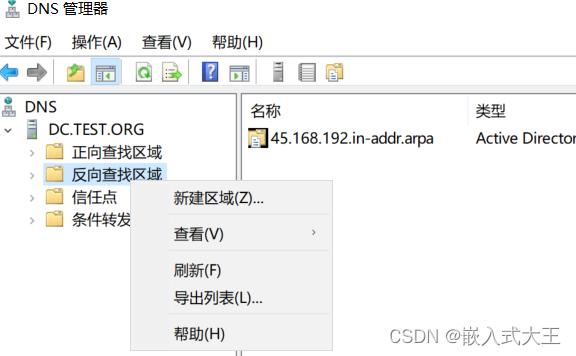
3.2 右击反向查找区域,点击新建区域
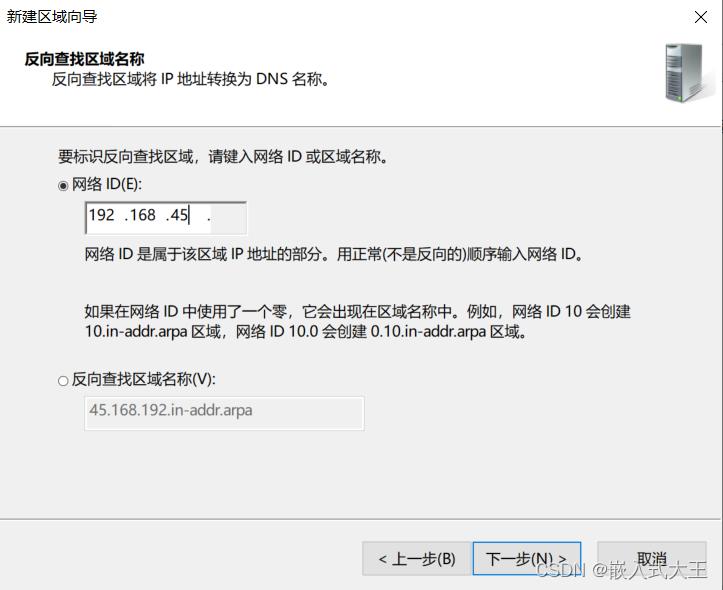
3.3 一直点击下一步,直到输入IP的页面,输入AD 服务器IP的前3个字段 例如我的IP为192.168.45.141,那么输入192.168.45,再一直点击下一步,直到结束。
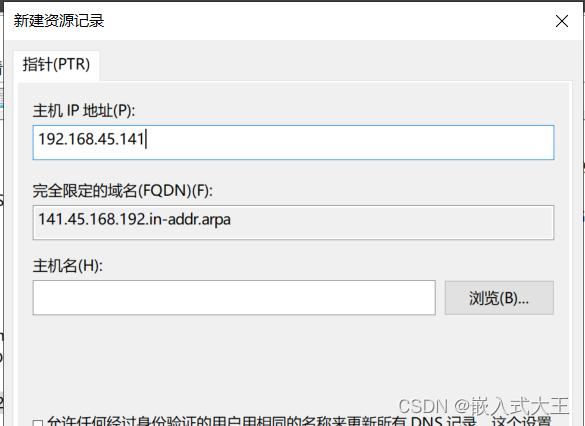
3.4 右击新生成的区域,点击新建指针
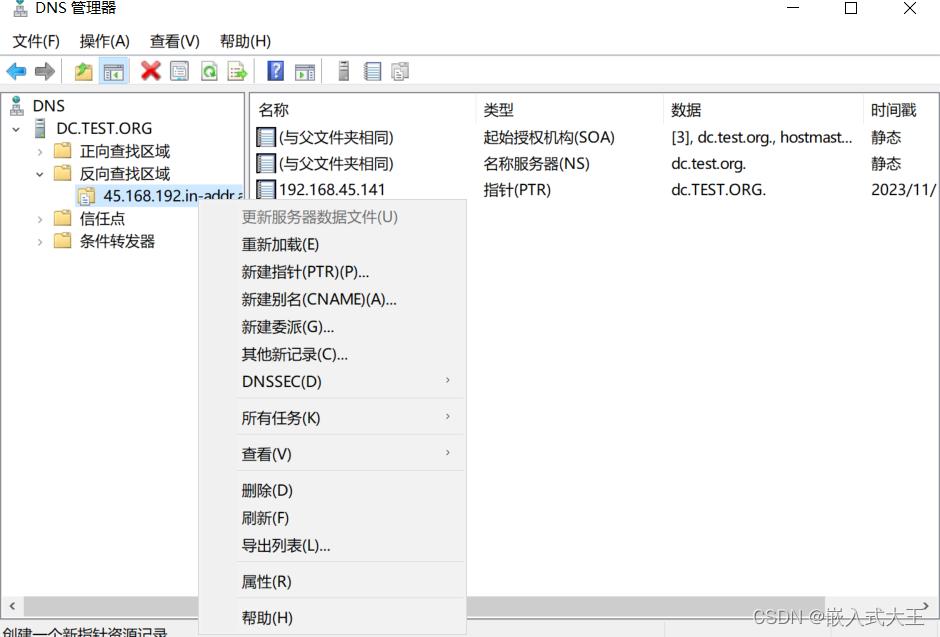
3.5 填写AD服务的IP地址,先关闭
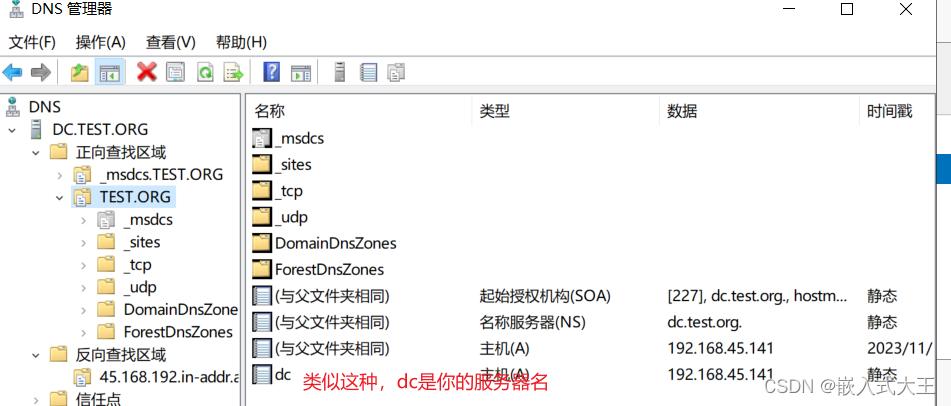
3.6 找到正向查找区域->域名->打开dc(你的是你自己的域名,我的是dc)
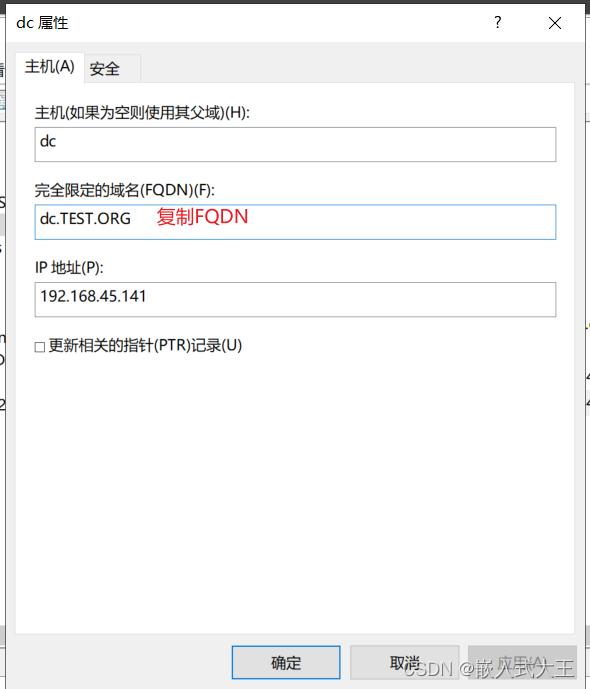
3.7 找到FQDN,将其复制到2.3.5主机名的地方即可。
3.8 ubuntu打开/etc/reslov.conf,修改nameserver的地址 为你AD的地址,再将你ubuntu的DNS设置为AD的IP,否则这个文件的值会一直变动

4.结言
直到这里,整个流程吗,包括配置文件全部结束,加油 。
知易行难。说说容易做到难。
例如,不受成败评价影响,坚持做一件事情10年以上,专注事情本身。
机器人专业不合格且失败讲师如何让内心保持充盈的正能量(节选)-CSDN博客
时间积累

注册20年。

创作历程10年。
创作10年过程中前3年,几乎没啥人看(无人问津),坚持;
创作10年过程中后3年,几乎没啥人看(机器学习),坚持。
大部分时间是一种逼着自己坚持的状态,这是养成一种习惯的方式。
此处强调:学习障碍是一种脑认知疾病,并非学生行为错误,这部分学生是病人而非犯错的人。
通过加课补习无法解决:“效率低的问题”,只是通过加长学习时间换取一点可怜的分数提升。
此文涉及深度思维和应激反应(浅层思维),其实是可以相互转换的。
上瘾沉迷的人恢复概率类似很多精神类疾病,大部分其实无法康复的。
由于这种精神状态会导致学习障碍-注意力不集中,容易走神,忍不住玩手机等,还有过于在意他人看法,看似自我其实盲从没有主见随波逐流。
需要可看原文,现实残酷。
即便是康复,所需要付出的努力也是十分巨大的。
治愈学习障碍所需的成本非普通家庭经济实力和认知水平所能承受。
预防为主才是最好的途径。
客观现象 objective phenomenon
如果学习成效低,通常与学习习惯,学习方法,学习方向等密切相关,这里不谈天赋。
- 学习习惯-长期养成,短期难以改变
- 学习方法-需要高维指导,通常自身不遇到重大刺激无法突破
- 学习方向-是否可以产生有价值成果的方向
在探讨学习成效低的问题时,确实可以从学习习惯、学习方法和学习方向这三个维度进行深入分析,特别是在ROS(Robot Operating System,机器人操作系统)机器人学习和研究的背景下。以下是对这三个方面以及如何将它们融入长期主义习惯中的详细阐述:
学习习惯
习惯的重要性:
- 学习习惯是长期养成的,它影响着一个人如何安排时间、如何集中注意力、如何处理学习中的困难等。
- 良好的学习习惯,如定时复习、主动思考、积极参与讨论等,能够显著提高学习效率。
在ROS学习中的应用:
- 定时实践:设定固定的时间进行ROS的实践操作,比如每天或每周的特定时段。
- 持续跟踪:建立学习日志,记录学习进度、遇到的问题和解决方案。
- 社区参与:加入ROS相关的论坛、社群,与其他学习者交流心得,互相激励。
长期主义习惯:
- 将上述习惯视为日常生活的一部分,长期坚持,形成自然的学习节奏。
学习方法
方法的重要性:
- 学习方法是提高学习效率的关键,它决定了学习者如何吸收、整合和应用知识。
- 高效的学习方法需要高维指导,即来自经验丰富者或专业导师的指引。
- 人工补充:网上找人或智能模型付费代做,不能提升能力
在ROS学习中的应用:
- 系统学习:从ROS的基础开始,逐步深入,形成完整的知识体系。
- 项目驱动:通过实际项目来学习和应用ROS,将理论知识转化为实践能力。
- 寻求指导:参加ROS的培训课程、研讨会,或寻找在线导师,获取专业的指导和反馈。
长期主义习惯:
- 不断学习新的学习方法,适应不断变化的学习环境和需求。
- 将项目驱动学习作为常态,通过实践不断深化对ROS的理解。
学习方向
方向的重要性:
- 学习方向决定了学习的目标和成果,一个有价值的学习方向能够激发学习者的动力和热情。
- 在ROS领域,选择与学习者和市场需求相契合的方向至关重要。
在ROS学习中的应用:
- 趋势分析:关注ROS的最新发展动态,了解行业趋势和市场需求。
- 定位明确:根据自己的兴趣、专长和职业规划,选择具体的学习方向,如ROS的导航、视觉、控制等。
- 价值导向:确保所选方向能够产生有价值的成果,无论是学术研究还是实际应用。
长期主义习惯:
- 保持对ROS领域的持续关注,不断调整和优化学习方向。
- 将学习与个人发展和市场需求相结合,确保学习的长期价值。
势-道-术-转型和变革
在ROS机器人的学习和研究中,势、道、术是相辅相成的:
- 势:指行业趋势和市场发展,学习者需要紧跟时代步伐,把握ROS的未来发展方向。
- 道:指学习的理念和原则,如长期主义、系统思维等,这些理念指导着学习者的学习行为。
- 术:指具体的学习方法和技巧,如项目驱动、系统学习等,这些方法是实现学习目标的具体手段。
转型和变革的长期主义习惯:
- 持续学习:将学习视为一种生活方式,不断追求知识和技能的提升。
- 适应变化:保持开放心态,积极适应ROS领域的变化和发展。
- 创新驱动:鼓励创新思维,勇于尝试新的学习方法和应用方向。
综上所述,通过培养良好的学习习惯、掌握高效的学习方法、选择有价值的学习方向,并坚持势-道-术-转型和变革的长期主义习惯,学习者可以在ROS机器人的学习和研究中取得更好的成效。
神经递质 neurotransmitter
在探讨ROS(Robot Operating System,机器人操作系统)机器人学习和研究的“势-道-术-转型和变革的长期主义习惯”时,我们可以从内啡肽和多巴胺这两个神经递质的角度来深入阐述。内啡肽和多巴胺在大脑中扮演着重要角色,分别与学习动力、成就感以及长期习惯的形成密切相关。
势:行业趋势与个人动力的内啡肽驱动
势的理解:
“势”指的是行业趋势和个人在ROS领域发展的动力。在ROS机器人的学习和研究中,把握行业趋势、了解技术前沿是至关重要的。
内啡肽的作用:
内啡肽是一种内源性的镇痛物质,同时也是一种“快乐激素”。当个体面临挑战、克服困难时,大脑会释放内啡肽,带来愉悦感和成就感,从而增强个体的学习动力和毅力。
在ROS学习中的应用:
- 关注行业趋势:定期阅读ROS相关的最新论文、博客、新闻报道等,了解技术前沿和市场需求,这有助于激发学习者的兴趣和动力。
- 设定挑战目标:为自己设定具有挑战性的学习目标,如完成一个复杂的ROS项目、参加ROS竞赛等。在克服困难、实现目标的过程中,内啡肽的释放会带来成就感,进一步激励学习者。
道:学习理念与长期习惯的多巴胺塑造
道的理解:
“道”指的是学习的理念和原则,如长期主义、系统思维等。在ROS机器人的学习和研究中,坚持正确的学习理念和原则,有助于形成长期的学习习惯。
多巴胺的作用:
多巴胺是一种与奖励、动机和习惯形成密切相关的神经递质。当个体预期到某种奖励或达成某种目标时,大脑会释放多巴胺,带来愉悦感和满足感,从而增强个体的学习动力和重复行为。
在ROS学习中的应用:
- 坚持长期主义:将ROS学习视为一种长期投资,而非短期行为。设定长期的学习目标和计划,如每年掌握一项新的ROS技能、参与一个ROS项目等。通过持续的努力和积累,逐渐形成稳固的学习习惯。
- 培养系统思维:将ROS学习视为一个系统工程,注重知识的整合和应用。通过构建知识体系、参与项目实践等方式,培养系统思维和解决问题的能力。这种能力的提升会带来内在的满足感,进一步激励学习者。
术:学习方法与技巧的内啡肽与多巴胺协同
术的理解:
“术”指的是具体的学习方法和技巧,如项目驱动、系统学习等。在ROS机器人的学习和研究中,掌握高效的学习方法和技巧,有助于提高学习效率和质量。
内啡肽与多巴胺的协同作用:
- 项目驱动学习:通过参与实际的ROS项目来学习知识和技能。在项目实践中,学习者会遇到各种挑战和问题,通过解决问题、实现目标,大脑会释放内啡肽和多巴胺,带来愉悦感和成就感。这种正向反馈会进一步激励学习者深入探索ROS领域。
- 系统学习:将ROS学习视为一个系统的过程,注重知识的连贯性和完整性。通过构建知识体系、制定学习计划等方式,提高学习效率和质量。当学习者掌握一项新的ROS技能或解决一个复杂的问题时,大脑会释放多巴胺,带来满足感和成就感。这种正向反馈会进一步巩固学习者的学习动力。
转型和变革的长期主义习惯与神经递质
转型和变革的理解:
在ROS领域,随着技术的不断进步和应用场景的拓展,学习者需要不断适应新的变化和挑战,实现个人和技能的转型和变革。
长期主义习惯与神经递质:
- 形成长期主义习惯:将ROS学习视为一种长期的生活方式,而非短期的行为。通过持续的努力和积累,逐渐形成稳固的学习习惯。这种习惯的形成离不开内啡肽和多巴胺的协同作用。内啡肽带来的成就感会激励学习者坚持学习;多巴胺带来的满足感会巩固学习者的学习动力。
- 应对变革和挑战:在ROS领域不断变革和挑战的背景下,学习者需要保持开放的心态和积极的学习态度。通过关注行业趋势、学习新的技术和方法等方式,不断提升自己的竞争力和适应能力。这种适应变革和挑战的能力同样离不开内啡肽和多巴胺的协同作用。内啡肽带来的勇气和毅力会帮助学习者克服困难和挑战;多巴胺带来的期待和动力会激励学习者不断探索和尝试新的领域。
总结
从内啡肽和多巴胺这两个神经递质的角度来看,ROS机器人学习和研究的“势-道-术-转型和变革的长期主义习惯”是一个相互促进、共同发展的过程。通过把握行业趋势、坚持正确的学习理念和原则、掌握高效的学习方法和技巧以及不断适应变革和挑战,学习者可以形成稳固的学习习惯,提高学习效率和质量,最终实现个人和技能的转型和变革。在这个过程中,内啡肽和多巴胺发挥着至关重要的作用,它们激励学习者不断克服困难、实现目标,享受学习带来的愉悦感和成就感。
基础概念
神经递质是神经元之间或神经元与效应器细胞之间传递信息的一种化学物质,它们在神经系统中发挥着至关重要的作用。以下是对神经递质的详细分类和说明:
神经递质的分类
根据神经递质的化学性质和功能特点,可以将其分为以下几类:
-
胆碱类神经递质
- 主要成员:乙酰胆碱(ACh)
- 作用:乙酰胆碱是周围神经中神经-肌肉接头及自主性神经节的神经递质。它能够特异性的作用于各类胆碱受体,对心血管系统、胃肠道以及泌尿道等组织有一定的药理作用。例如,在神经-肌肉接头处,乙酰胆碱的释放能够引发肌肉收缩。
-
单胺类神经递质
- 主要成员:多巴胺(DA)、去甲肾上腺素(NA)、肾上腺素、5-羟色胺(5-HT)等
- 作用:这类神经递质在中枢神经系统中起着重要的调节作用。它们可以影响情绪、睡眠、食欲、注意力以及认知功能等。例如,多巴胺与愉悦感、动机和奖励机制相关,缺乏多巴胺可能导致帕金森病等疾病;去甲肾上腺素则与应激反应和注意力调节相关。
-
氨基酸类神经递质
- 主要成员:谷氨酸(Glu)、γ-氨基丁酸(GABA)、甘氨酸(Gly)、牛磺酸(Tau)等
- 作用:氨基酸类神经递质在神经系统中具有广泛的分布和多样的功能。其中,谷氨酸是主要的兴奋性递质,能够增加神经元的兴奋性,促进神经冲动的传递;而γ-氨基丁酸和甘氨酸则是主要的抑制性递质,能够减少神经元的兴奋性,抑制神经冲动的传递。
-
肽类神经递质
- 主要成员:内啡肽、脑啡肽、P物质、神经加压素、胆囊收缩素、生长抑素、血管加压素、缩宫素等
- 作用:肽类神经递质在神经系统中参与多种生理功能,如疼痛调节、应激反应、水盐平衡、生殖调节等。例如,内啡肽能够抑制疼痛,提高机体的适应能力;脑啡肽则与镇痛和情绪调节有关。
-
其他类神经递质
- 主要成员:腺苷、腺苷三磷酸(ATP)、一氧化氮(NO)、一氧化碳(CO)、前列腺素、神经活性类固醇等
- 作用:这些神经递质在神经系统中具有特殊的调节作用。例如,腺苷在中枢神经系统损伤和退行性疾患中能够保护神经元和胶质细胞;一氧化氮则在神经传递、血管舒张、免疫调节等方面发挥着重要作用。
神经递质的作用机制
神经递质的作用机制主要包括合成、储存、释放和灭活四个环节。以乙酰胆碱为例:
- 合成:乙酰胆碱的合成主要是在胆碱能神经末梢内进行。由胆碱和乙酰辅酶A在胆碱乙酰化酶的催化下合成乙酰胆碱。
- 储存:合成的乙酰胆碱被转移到囊泡中储存起来,以备释放。
- 释放:当神经冲动到达神经末梢时,囊泡膜与突触前膜相融合,将乙酰胆碱释放入突触间隙。
- 灭活:释放后的乙酰胆碱与突触后膜上的胆碱受体结合,产生生理效应。同时,乙酰胆碱由神经末梢部位的胆碱酯酶水解为胆碱和乙酸而灭活。部分胆碱再一次被胆碱能神经末梢摄取,参与新的乙酰胆碱的合成。
神经递质与神经系统功能
神经递质在神经系统中发挥着多种重要作用,包括传递神经冲动、调节神经元的兴奋性和抑制性、调节情绪、参与学习和记忆、调控内分泌系统等。它们的失衡可能导致多种精神和身体健康问题,如抑郁症、焦虑症、神经退行性疾病等。因此,了解和研究神经递质的作用对于开发治疗这些疾病的药物和策略具有重要意义。
综上所论,神经递质是神经系统中至关重要的化学信使,它们在维持神经系统正常功能中发挥着不可替代的作用。
ROS机器人学习与研究的势-道-术-转型和变革的长期主义习惯
在探索ROS机器人的广阔天地中,我们不禁被神经递质这一神经科学核心概念的深邃所吸引。它不仅是神经元间信息传递的桥梁,更是神经系统功能调控的精髓。而当我们将目光投向ROS机器人的学习与研究时,同样需要一种势-道-术相结合的长期主义习惯,以应对转型与变革的挑战。
势:顺应时代潮流,把握发展大势
ROS机器人技术作为人工智能和自动化领域的前沿阵地,正以前所未有的速度发展。就像神经递质在神经系统中发挥着至关重要的作用一样,ROS技术在机器人领域也扮演着举足轻重的角色。我们必须顺应这一时代潮流,把握ROS技术的发展大势,不断学习新知识、新技能,以适应日新月异的技术变革。长期主义的习惯要求我们保持对技术的敏感性和前瞻性,时刻关注行业动态,紧跟技术前沿,为ROS机器人的学习与研究奠定坚实的基础。
道:秉持核心理念,坚守研究之道
在ROS机器人的学习与研究过程中,我们需要秉持一些核心理念,如系统化思维、创新精神、实践导向等。这些理念就像神经递质在神经系统中的调节作用一样,指引着我们前进的方向。系统化思维要求我们全面、深入地理解ROS技术的各个方面,形成完整的知识体系;创新精神则激励我们不断尝试新的思路和方法,勇于挑战传统观念和技术瓶颈;实践导向则强调将理论知识应用于实际项目中,通过动手实践来加深对ROS技术的理解和掌握。坚守这些研究之道,我们才能在ROS机器人的学习与研究道路上走得更远。
术:掌握核心技术,精进研究之术
术,即具体的技术和方法。在ROS机器人的学习与研究中,我们需要掌握一系列核心技术,如ROS系统的架构、编程语言、算法原理等。这些技术就像神经递质的合成、储存、释放和灭活机制一样,是ROS机器人技术的基础和核心。只有深入理解和掌握这些技术,我们才能更好地应用ROS技术来解决实际问题,推动ROS机器人的发展。同时,我们还需要不断精进研究之术,通过实践、交流、合作等方式来提升自己的技术水平和研究能力。
转型与变革:长期主义习惯下的必然选择
在ROS机器人的学习与研究过程中,我们必然会面临转型与变革的挑战。技术的快速发展、市场需求的不断变化、竞争格局的日益激烈,都要求我们具备适应变革的能力和勇气。长期主义的习惯要求我们不仅要关注当前的技术和市场需求,还要预见未来的发展趋势和潜在机遇。只有这样,我们才能在转型与变革中保持领先地位,为ROS机器人的发展做出更大的贡献。
总之,ROS机器人的学习与研究需要一种势-道-术相结合的长期主义习惯。我们要顺应时代潮流,把握发展大势;秉持核心理念,坚守研究之道;掌握核心技术,精进研究之术;同时,还要勇于面对转型与变革的挑战,以长期主义的习惯来引领我们的前行之路。相信在未来的日子里,我们将会在ROS机器人的学习与研究中取得更多突破性的成果,为人类的进步和发展做出更大的贡献。

博客之星2024年度总评选—主题文章创作要求:
1、文章创作方向主要以总结盘点、技术总结或技术洞察三个方向为主( 3 选 1 ),具体如下:
- 总结盘点类:个人成长与突破盘点、年度创作历程回顾、个人生活与博客事业的融合与平衡等;
- 技术总结类:特定技术领域的年度深度总结、技术工具与平台的年度使用心得、技术项目实战经验与成果展示等;
- 技术洞察类:前沿技术趋势洞察与分析、跨领域技术融合与创新实践、技术对社会与人文的影响深度思考等。
2、文章必须为公开且原创,严禁抄袭、洗稿、引流等违规行为;
3、投稿内容需积极向上,字数不低于 800 字(不包含代码);
4、未在规定时间内完成创作和未按照要求的创作均视为无效参与。
提醒:在发布作品前,请将不需要的内容删除。
评论记录:
回复评论: