
本文介绍了 Autoware.universe 各个传感器ROS2驱动,本系列其他文章:
Autoware.universe部署01:Ubuntu20.04安装Autoware.universe并与Awsim联调
Autoware.universe部署02:高精Lanelet2地图的绘制
Autoware.universe部署03:与Carla(二进制版)联调
一、激光雷达驱动
以速腾32线激光雷达为例:
(1) 建立工作空间,下载两个功能包:
- 官方驱动下载地址:http://iyenn.com/index/link?url=https://github.com/RoboSense-LiDAR/rslidar_sdk
- 官方雷达ROS2消息类型下载地址:http://iyenn.com/index/link?url=https://github.com/RoboSense-LiDAR/rslidar_msg
mkdir -p ~/rs_driver/src
cd ~/rs_driver/
- 1
- 2
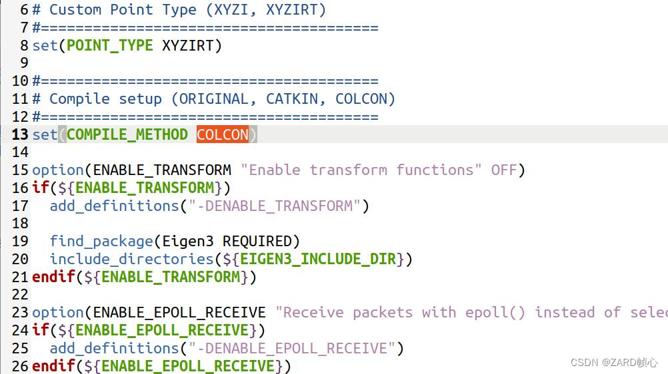
(2)速腾聚创雷达ROS1,ROS2代码都是同一个链接,所以将ununtu18.04里面用的驱动拿了过来,然后打开senser_driver/src/rslidar_sdk/CmakeLists.txt,选择CLOCON编译方式
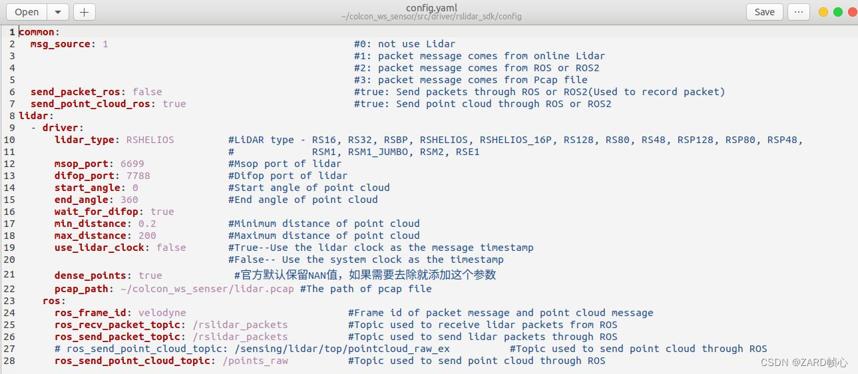
(3)修改参数配置
主要是修改为你的lidar类型,坐标系以及点云话题:
(4)将下载的两个功能包一起放到src下,将原来的package.xml文件重命名为package.xml.bak备份,把package_ros2.xml文件重命名为package.xml,然后编译:
#编译
cd ~/rs_driver/
colcon build
- 1
- 2
- 3
(5)设备连接与网络配置
- 准备一套速腾聚创16线激光雷达(包括激光雷达、电源盒子、航插头以及网线);
- 本文使用的PC系统是Ubuntu 18.04系统,也可使用Ubuntu 16.04或Ubuntu 20.04;
- 准备AC 220V电源或DC 12V电源;
如下图所示,将雷达一端的航插头接口与雷达电源盒子的航插头接口两个,对准红点接好;

电源盒子接上电源,接上网线(网线一端接入到PC,一端接入到电源盒子)如下图:

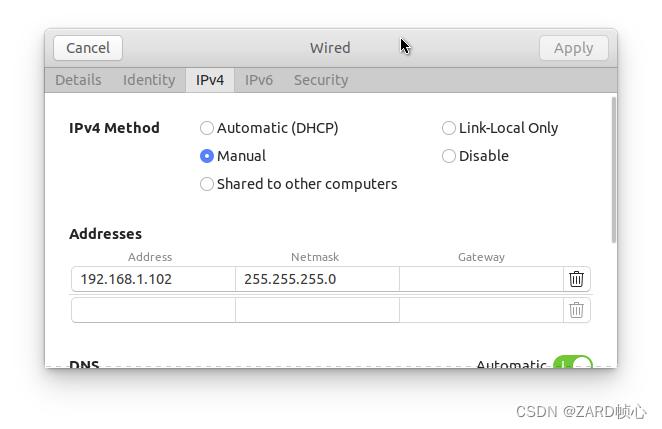
雷达点云盒子连接雷达、点云以及网线,网线另一端连接计算机(或者通过交换机转接),设置网络为静态IP,IP地址:192.168.1.102,子网掩码:255.255.255.0
(6)驱动雷达
source install/setup.bash
ros2 launch rslidar_sdk start.py
- 1
- 2
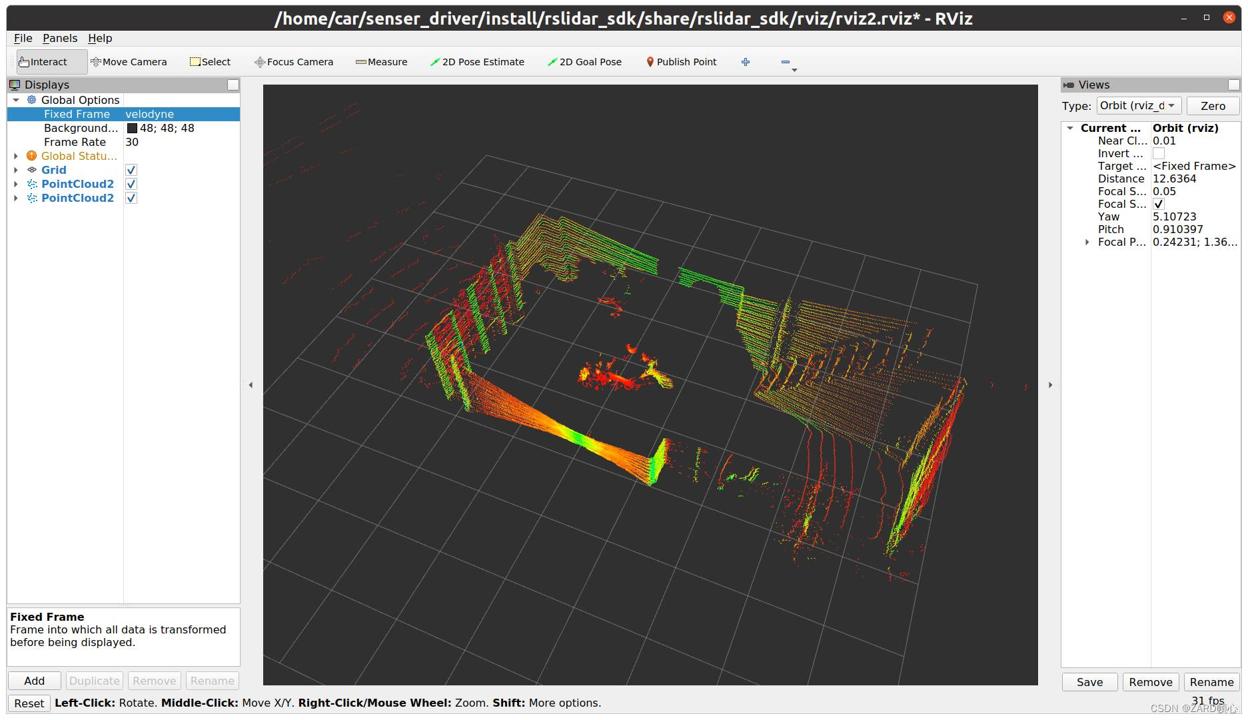
在打开的rviz2中,Frame坐标系改成velodyne,点云话题选择/points_raw,可以成功显示雷达点云
二、IMU驱动
本文设备为亚伯智能十轴IMU惯导模块
2.1 上位机配置
(1) 安装串口驱动
打开WIndows,在配套的资料中找到CP2102_USB驱动.zip文件,下载到本地电脑并解压,双击CP210xVCPInstaller_x64.exe文件打开安装程序,然后跟着提示一直点击下一步,直到完成即可。
(2)连接上位机
解压资料中的IMU标准上位机(V6.2.60).zip压缩包,进入上位机软件找到MiniIMU.exe。双击打开上位机软件,可以看到提示未能搜索到设备,关闭提示框。如果已经连接IMU模块会自动连接上模块。
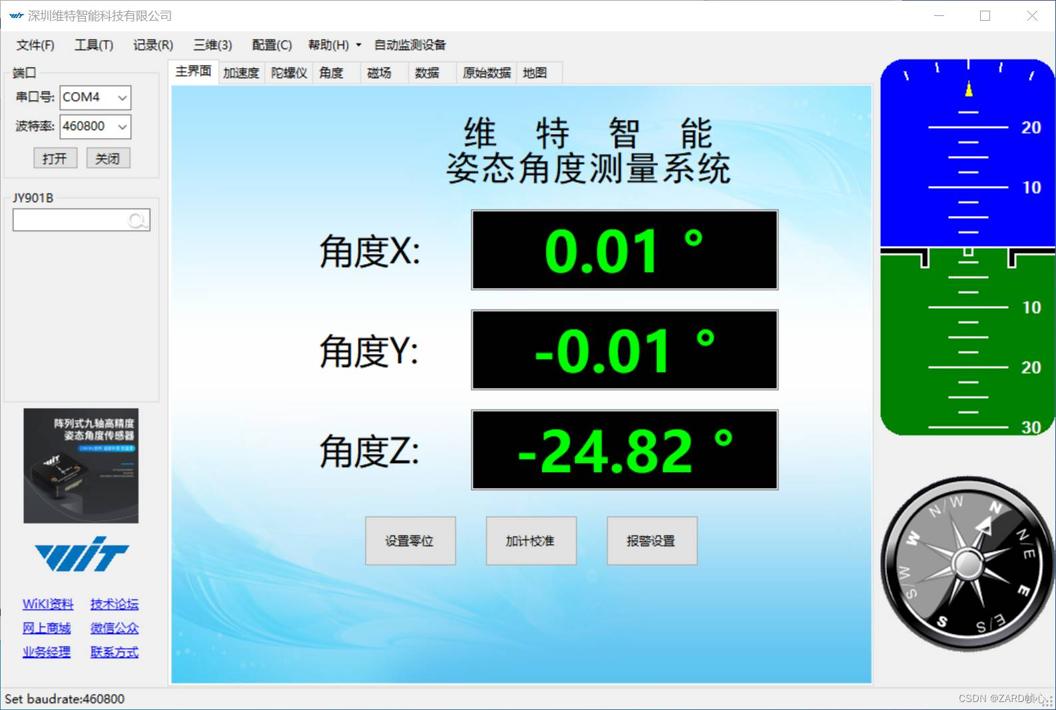
将IMU模块通过USB-TypeC数据线连接到电脑上。然后点击然后点击菜单栏的‘自动监测设备’。连接成功,可以看到角度X、角度Y、角度Z有数据变化。如果连接不成功,请确认是否已经安装好串口驱动,或者换个USB口试试。

IMU模块出厂已经烧录好固件,连接上位机后可以用上位机查看IMU模块的当前姿态。
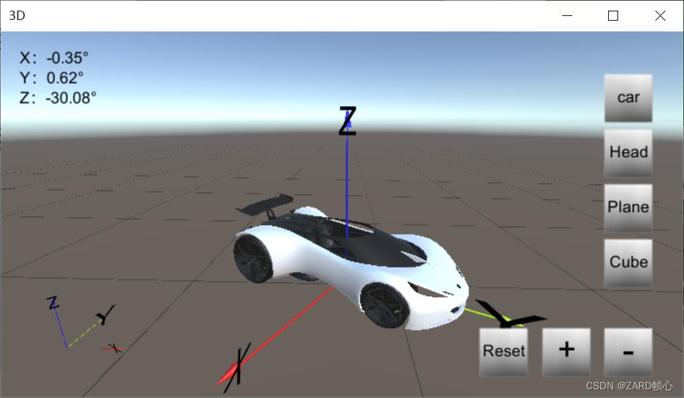
点击’三维‘,可以看到弹出一个窗口,默认会展示一台汽车模型,当我们改变IMU模块的姿态时,模型的姿态会跟着IMU模块的变化。Y轴为车头,IMU模块也应Y轴向前放置。
(3)参数配置
点击菜单栏上的‘配置’,会弹出一个窗口,查看右下角的状态,一定要是‘在线’才是正确的,如果出现‘离 线’则说明没连接上IMU模块。
通讯速率:串口通讯速率,默认9600,可选择其他波特率(4800~921600)。
回传速率:串口回传数据的速率,默认为10Hz,可修改为0.2Hz~200Hz。10HZ指的是1S回传10个数据包,按默认回传1个数据包是11个字节。
注:如果需要200HZ的回传速率,则只能勾选三个量,比如“加速度”,“角速度”,“角度”。
注:如果回传内容较多,同时通信的波特率又较低的情况下,可能没法传输这么多数据,此时模块会自动降频,并以允许的最大输出速率进行输出。简单点说 就是回传速率高的话,波特率也要设置高一点,一般用115200。这里我们波特率改为480600,回传速率改为100Hz

设置串口输出的内容,串口输出内容可查看协议文件解析数据。
注意:勾选上“GPS原始”之后模块只输出GPS原始的信息了,其它数据都不会输出。
4.2 IMU校准
(1)加速度计校准
将IMU模块平放在桌子或者其他设备上,如果发现‘角度X‘和’角度Y‘大于1°,那么需要进行加速度计校准。点击菜单栏中的’配置‘打开配置界面,保证IMU模块平放的情况下,点击’加速度‘,然后再点击’设置角度参考‘。

校准之后可以看到‘角度X‘和’角度Y‘接近于0°
(2)IMU模块上电后,打开上位机显示3D模型,转动模块Z轴航向角,3D模型抖动,或者反应迟钝,请在上
位机进行磁力校准设备。
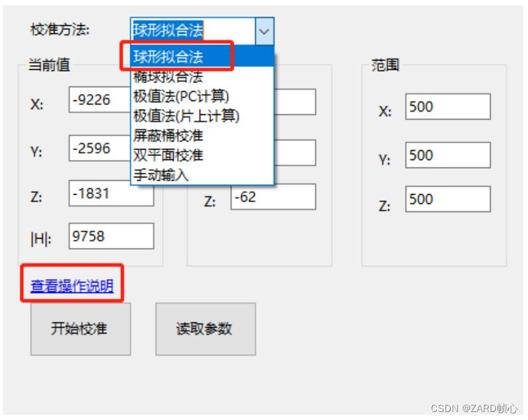
点击配置界面中的‘磁场’,会弹出校准磁场的界面。磁场校准有多种校准方式,比较常规的校准方式为球形拟合法。
分别校准X/Y/Z轴,看chartYZ/chartXZ/chartXY变化。将IMU模块水平放置。然后缓慢绕X/Y/Z轴旋转360°以
上,chart界面蓝色数据分布在绿线旁为正常。为了数据更加准确,可多转几圈。
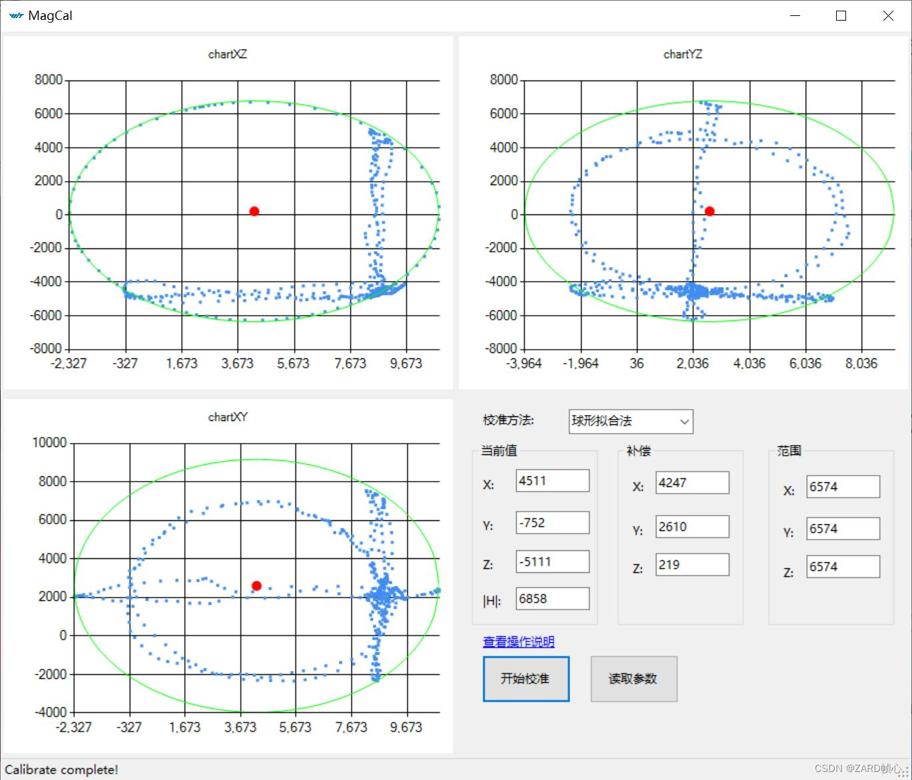
XYZ三轴都校准完成后点击‘结束校准’。注意,在校准Y轴时,只看chartXZ的数据就好,其他两个视图也有数据,不需要关心。同理其他两个轴也是一样。
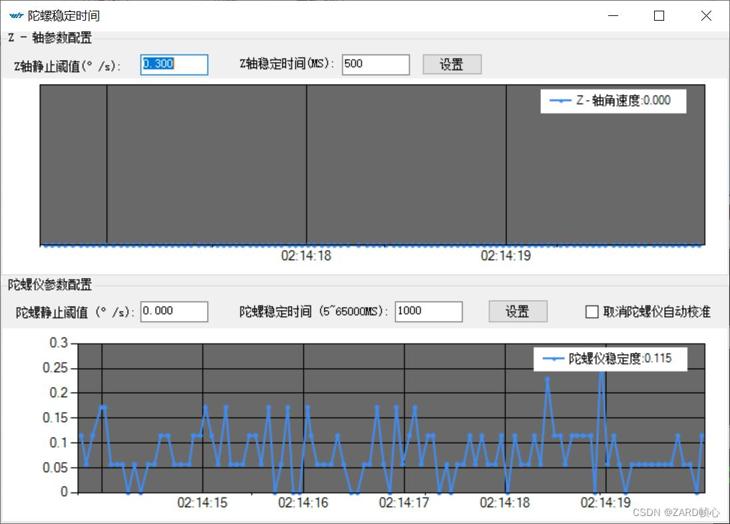
(3)陀螺仪校准
陀螺仪默认开启自动校准功能,不需要额外设置。保持开启陀螺仪自动校准功能即可。
4.3 安装ROS驱动
(1)安装依赖:
pip3 install pyserial
- 1
(2)在配套资料中找到ROS2驱动包wit_ros2_imu,放入工作空间编译,遇到以下警告:
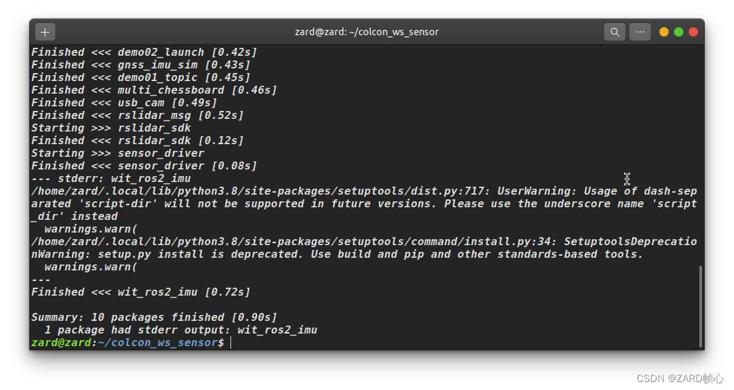
根据提示将setup.cfg的横线改为下划线:

(3)绑定端口
为了防止多个usb设备同时插入的时候,系统识别错误,我们给该模块的串口名字绑定成/dev/imu_usb,终端输入
cd src/wit_ros_imu
sudo chmod 777 bind_usb.sh
sudo sh bind_usb.sh
- 1
- 2
- 3
重新插拔连接IMU模块的USB数据线。以生效绑定的端口,输入以下指令检测绑定端口是否成功,
ll /dev/imu_usb
- 1
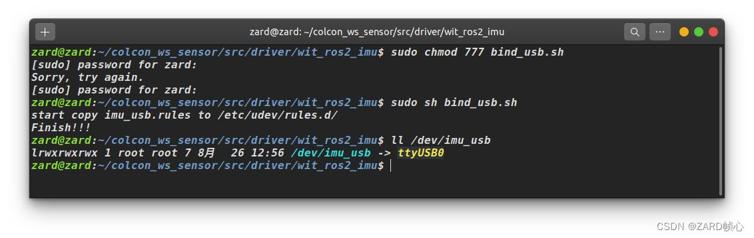
不一定是ttyUSB0,只要显示是USB设备就行了。我们下面安装的GNSS模块也有一个串口,这里可以将其也给绑定。首先通过插拔两个端口,我们可以lsusb查看端口信息:
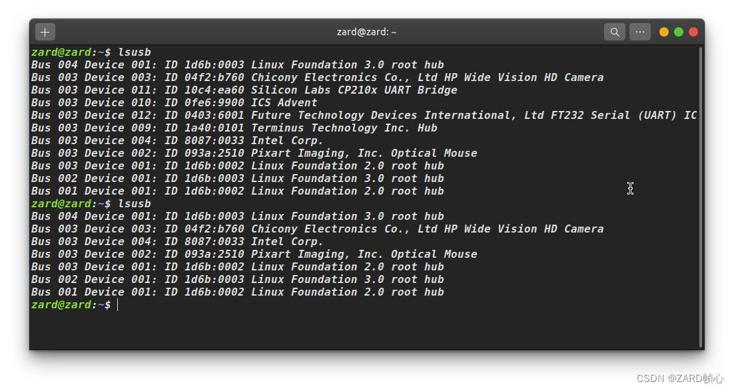
其中GNSS的为:
0403:6001 Future Technology Devices International, Ltd FT232 Serial (UART) IC
- 1
IMU模块的为:
10c4:ea60 Silicon Labs CP210x UART Bridge
- 1
然后创建.rules文件(或者直接在上面IMU的文件中修改),填写以下内容
KERNEL=="ttyUSB*", ATTRS{idVendor}=="10c4", ATTRS{idProduct}=="ea60", MODE:="0777", SYMLINK+="imu_usb"
KERNEL=="ttyUSB*", ATTRS{idVendor}=="0403", ATTRS{idProduct}=="6001", MODE:="0777", SYMLINK+="gnss"
- 1
- 2

然后:
sudo cp imu_usb.rules /etc/udev/rules.d
service udev reload
service udev restart
- 1
- 2
- 3
输入以下指令检测绑定端口是否成功,
ll /dev/imu_usb
ll /dev/gnss
- 1
- 2
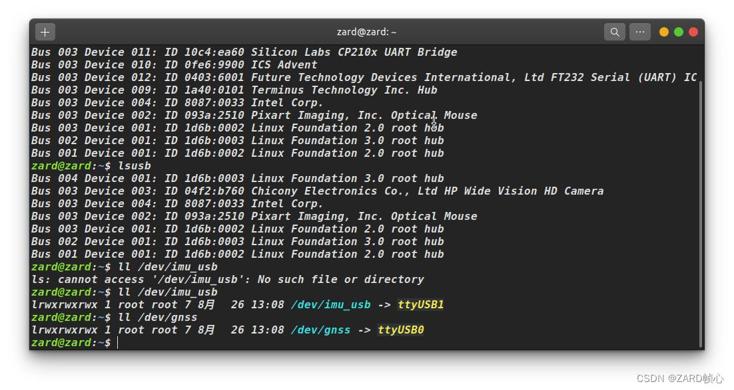
记得把GNSS端口改成我们绑定的
(4)修改波特率
程序默认是使用9600的波特率,我们在上位机修改了波特率460800,那么则需要修改源码中的波特率,源码修改波特率的位置是,wit_ros2_imu/wit_ros2_imu/wit_ros2_imu.py
#149行
def driver_loop(self, port_name):
# 打开串口
try:
wt_imu = serial.Serial(port="/dev/imu_usb", baudrate=460800, timeout=0.5)
- 1
- 2
- 3
- 4
- 5
把9600改成上位机上修改的波特率,然后保存后退出,最后回到工作空间目录下进行编译即可。
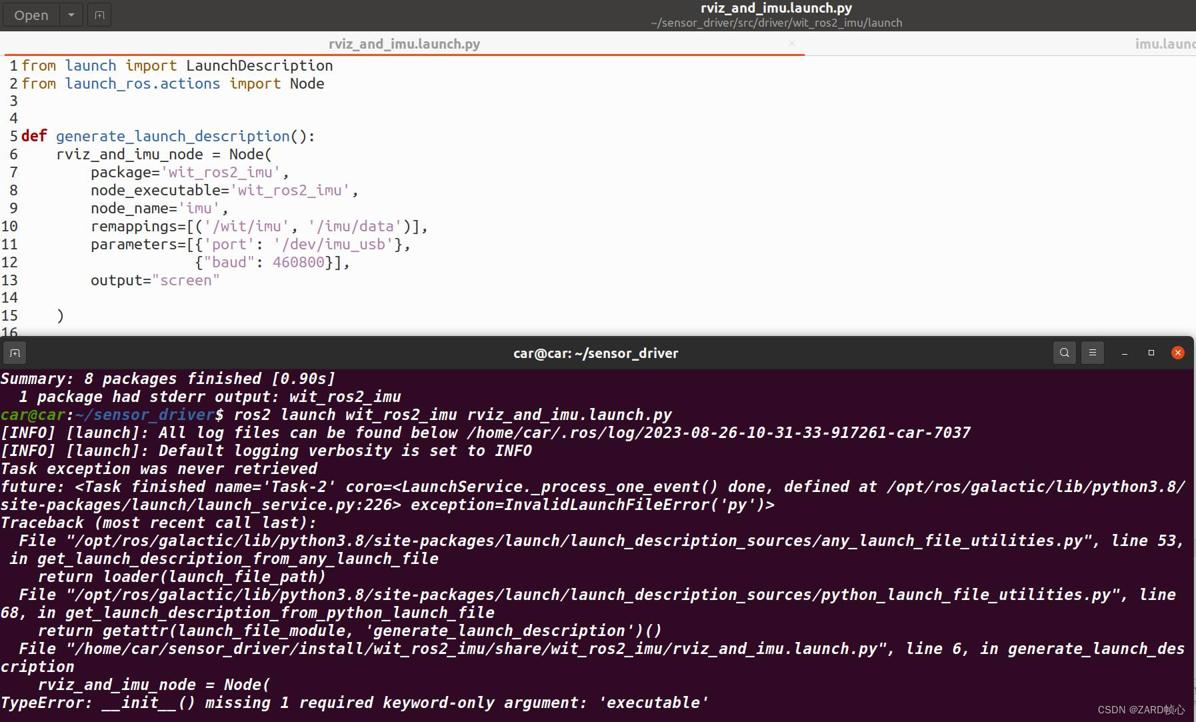
(5)运行测试
source install/setup.bash
ros2 launch wit_ros2_imu rviz_and_imu.launch.py
- 1
- 2
报下面的错误,是因为launch语法的问题,可能是官方使用的ROS版本比较老
修改launch,并重新编译:
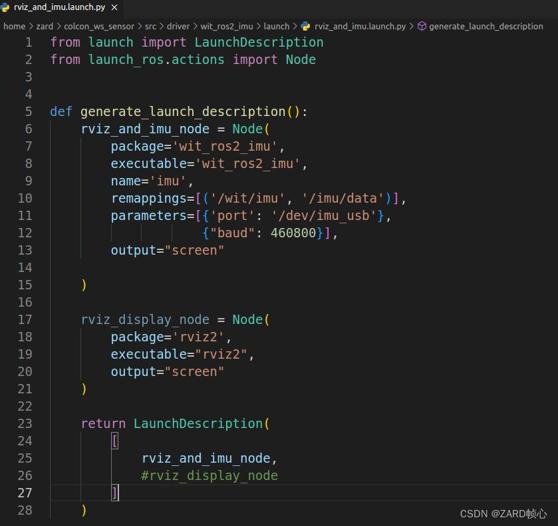
再次运行
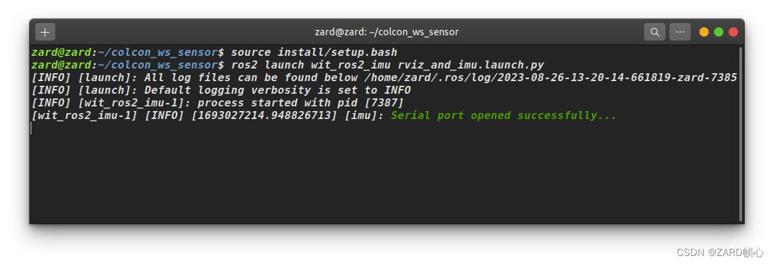
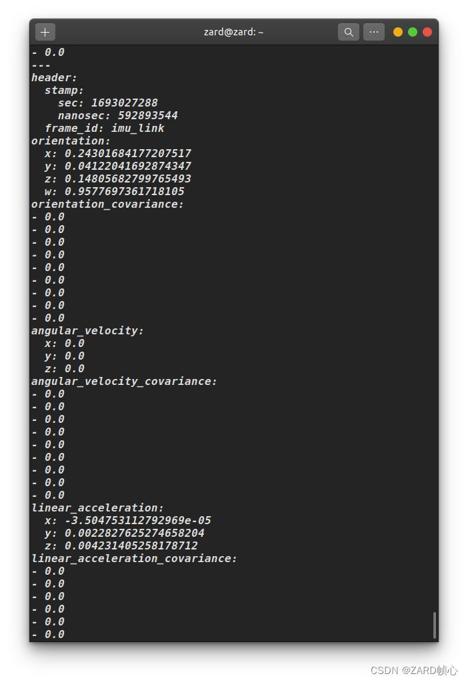
查看IMU话题:
ros2 topic echo /imu/data_raw
三、CAN驱动
接收autoware.universe的控制话题,并下发到底盘控制实车运动,同时接收底盘反馈的车的速度信息,发送给Autoware进行位姿初始化,编写了ROS2版本的控制底盘程序(CAN协议不同不能通用,只能作为参考):
# -*- coding: utf-8 -*-
import math
import time
import socket
import cantools
import threading
import rclpy
from rclpy.node import Node
from builtin_interfaces.msg import Time
from binascii import hexlify
from geometry_msgs.msg import TwistStamped, Twist
from autoware_auto_control_msgs.msg import AckermannControlCommand
from autoware_auto_vehicle_msgs.msg import ControlModeReport, GearReport, SteeringReport, VelocityReport
# 弧度转角度系数
radian2angle = 57.29577951308232
# 创建socket套接字
udp_socket = socket.socket(socket.AF_INET, socket.SOCK_DGRAM) # AF_INET表示使用ipv4,默认不变,SOCK_DGRAM表示使用UDP通信协议
# 绑定端口port
local_addr = ("192.168.1.102", 8882) # 本地ip,端口号
udp_socket.bind(local_addr) # 绑定端口
# 指定要接收的前五个字节的CAN协议数据
EXPECTED_DATA = bytes([0x08, 0x00, 0x00, 0x01, 0x16])
# 档位+车速0指令:08 00 00 00 E2 01 00 00 00 00 00 00 00
drive_by_wire_command = bytes([0x08, 0x00, 0x00, 0x00, 0xE2, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00])
# 控制方向盘转到100度,转速100
test1 = bytes([0x08, 0x00, 0x00, 0x04, 0x69, 0x20, 0x00, 0x00, 0x04, 0x64, 0x00, 0x64, 0x24])
# 控制方向盘转到0度,转速50
test2 = bytes([0x08, 0x00, 0x00, 0x04, 0x69, 0x20, 0x00, 0x00, 0x04, 0x00, 0x00, 0x32, 0x16])
data_EV1 = {'Gear': 0, 'Invalid': 0, 'EV_Speed_L': 0, 'EV_Speed_H' : 0,
'Stay0': 0, 'Stay1': 0, 'Stay2': 0, 'Stay3': 0, 'Stay4': 0}
data_EPS2 = {'Work_mode': 32, 'Stay0': 0, 'Stay1': 0, 'Steer_Angle_H':0,
'Steer_Angle_L':0, 'Angle_alignment': 0, 'Angular_velocity': 100}
message_EV1_front = bytes([0x08, 0x00, 0x00, 0x00, 0xE2]) # EV1的帧信息与帧ID
message_EPS2_front = bytes([0x08, 0x00, 0x00, 0x04, 0x69]) # EPS2的帧信息与帧ID
# 计算异或校验值
def Calculate_XOR_value(dict_data):
# 提取所有值
values = list(dict_data.values())
# 计算异或校验码
result = values[0]
for value in values[1:]:
result ^= value
# 返回
return result
def calculate_speed(linear_speed):
EV_Speed_H = int((linear_speed * 185)) // 256
EV_Speed_L = int((linear_speed * 185)) % 256
# print('EV_Speed_H:%f' % EV_Speed_H)
# print('EV_Speed_L:%f' % EV_Speed_L)
data_EV1['EV_Speed_L'] = EV_Speed_L
data_EV1['EV_Speed_H'] = EV_Speed_H
def calculate_angle(linear_speed, angular_speed):
# 转弯的角度 = arctan(( 角速度 / 线速度 ) * 车长 )
Steer_Angle = -math.atan((angular_speed/linear_speed)*1) * radian2angle * 4.5
print('Steer_Angle:%f' % Steer_Angle)
# 实际测试下来,方向盘转动的角度范围是-27.5~27.5,对应的取值范围是924~1124 27.5*3.6=99
Steer_Angle_H = int((Steer_Angle * 3.6) + 1024) // 256
Steer_Angle_L = int((Steer_Angle * 3.6) + 1024) % 256
# print('Steer_Angle_H:%f' % Steer_Angle_H)
# print('Steer_Angle_L:%f' % Steer_Angle_L)
data_EPS2['Steer_Angle_H'] = Steer_Angle_H
data_EPS2['Steer_Angle_L'] = Steer_Angle_L
def calculate_angle(angular_rad):
Steer_Angle = -angular_rad * radian2angle
print("Steer_Angle:", Steer_Angle)
# 实际测试下来,方向盘转动的角度范围是-27.5~27.5,对应的取值范围是924~1124 27.5*3.6=99
Steer_Angle_H = int((Steer_Angle * 3.6) + 1024) // 256
Steer_Angle_L = int((Steer_Angle * 3.6) + 1024) % 256
# print('Steer_Angle_H:%f' % Steer_Angle_H)
# print('Steer_Angle_L:%f' % Steer_Angle_L)
data_EPS2['Steer_Angle_H'] = Steer_Angle_H
data_EPS2['Steer_Angle_L'] = Steer_Angle_L
# udp向底盘发送can协议
def udp_send_can(message_name):
udp_socket.sendto(message_name, ("192.168.1.10", 6666))
# 处理接收到的CAN消息的函数
def process_can_message(data,node):
# 解码CAN消息
can_data = list(data[5:]) # 从第6个字节开始是CAN数据
message = node.db.decode_message("VCU", can_data)
# 打印解码结果
# print(message)
# print('MP_AP:', message['MP_AP'])
# print('Gear:', message['Gear'])
# print('Driver_Break:', message['Driver_Break'])
# print('Steer_Angle_L:', message['Steer_Angle_L'])
# print('Steer_Angle_H:', message['Steer_Angle_H'])
# print('DM_Speed_L:', message['DM_Speed_L'])
# print('DM_Speed_H:', message['DM_Speed_H'])
# 处理CAN中接收到的数据,转化成线速度和角速度
feedback_twist_linear_x = (message['DM_Speed_H'] * 256 + message['DM_Speed_L']) / 185
Steer_Angle = (message['Steer_Angle_H'] * 256 + message['Steer_Angle_L'] - 1024) / 3.6
# 角速度 = tan(转向角度) * 线速度 / 前后轮轴距
feedback_twist_angular_z = math.tan(Steer_Angle / radian2angle) * feedback_twist_linear_x / 1
if (message['Gear'] == 1):
feedback_twist_linear_x = feedback_twist_linear_x
elif (message['Gear'] == 2):
feedback_twist_linear_x = -feedback_twist_linear_x
else:
feedback_twist_linear_x = 0.0
# 发布处理后的Twist消息到另一个话题
node.publish_data(feedback_twist_linear_x, feedback_twist_angular_z)
node.pubilsh_control_mode(1)
node.pubilsh_gear(2)
node.pubilsh_steering(-Steer_Angle / radian2angle)
node.pubilsh_velocity("base_link", feedback_twist_linear_x, 0.0, 0.0)
# 接收数据的线程函数
def receive_data(node):
while rclpy.ok():
data, addr = udp_socket.recvfrom(13)
# print(hexlify(data).decode('ascii'))
# 确保接收到的数据满足预期的CAN数据
if data[:5] == EXPECTED_DATA:
# 在新的线程中处理CAN消息,以保证实时性
threading.Thread(target=process_can_message, args=(data,node)).start()
class TopicSubscriberPublisher(Node):
def __init__(self):
super().__init__('cmd_vel_to_can')
# 加载dbc文件
self.declare_parameter("dbc")
dbcfile = self.get_parameter("dbc").get_parameter_value().string_value
self.db = cantools.database.load_file(dbcfile)
self.subscriber = self.create_subscription(AckermannControlCommand, 'control/command/control_cmd', self.sub_callback, 10)
# self.publisher = self.create_publisher(Twist, 'twist_cmd_feedback', self.pub_callback, 10)
self.publisher_data = self.create_publisher(Twist, 'twist_cmd_feedback', 10)
self.publisher_control_mode = self.create_publisher(ControlModeReport, '/vehicle/status/control_mode', 10)
self.publisher_gear = self.create_publisher(GearReport, '/vehicle/status/gear_status', 10)
self.publisher_steering = self.create_publisher(SteeringReport, '/vehicle/status/steering_status', 10)
self.publisher_velocity = self.create_publisher(VelocityReport, '/vehicle/status/velocity_status', 10)
# self.get_logger().info('TopicSubscriberPublisher node initialized')
def sub_callback(self, msg):
# 1. 发送档位+车速0指令:08 00 00 00 E2 01 00 00 00 00 00 00 00
udp_send_can(drive_by_wire_command)
# 2. 接收autoware传来的线速度和角速度
EV_Speed = msg.longitudinal.speed
# angular_velocity = msg.lateral.steering_tire_rotation_rate
angular_rad = msg.lateral.steering_tire_angle
# print('EV_Speed:%f' % EV_Speed)
# print('angular_velocity:%f' % angular_velocity)
print('angular_rad:%f' % angular_rad)
# 3. 计算档位、速度、角度
if (EV_Speed > 0):
data_EV1['Gear'] = 1
calculate_speed(EV_Speed)
# calculate_angle(EV_Speed, angular_velocity)
calculate_angle(angular_rad)
elif (EV_Speed < 0):
data_EV1['Gear'] = 2
calculate_speed(-EV_Speed)
# calculate_angle(-EV_Speed, angular_velocity)
calculate_angle(angular_rad)
else:
data_EV1['Gear'] = 0
calculate_speed(0)
# calculate_angle(1, angular_velocity)
calculate_angle(angular_rad)
# 4. 发送can消息
message_EV1 = self.db.encode_message("EV1", data_EV1)
message_linear_velocity = message_EV1_front + message_EV1
# print(hexlify(message_linear_velocity).decode('ascii'))
udp_send_can(message_linear_velocity)
# 计算异或校验码
Check = Calculate_XOR_value(data_EPS2)
data_EPS2.update({'Check' : Check})
message_EPS2 = self.db.encode_message("EPS2", data_EPS2)
message_angle = message_EPS2_front + message_EPS2
# print(hexlify(message_angle).decode('ascii'))
udp_send_can(message_angle)
def publish_data(self, data1, data2):
msg = Twist()
msg.linear.x = data1
msg.angular.z = data2
self.publisher_data.publish(msg)
def pubilsh_control_mode(self, data):
msg = ControlModeReport()
msg.mode = data
self.publisher_control_mode.publish(msg)
def pubilsh_gear(self, data):
msg = GearReport()
msg.report = data
self.publisher_gear.publish(msg)
def pubilsh_steering(self, data):
msg = SteeringReport()
msg.steering_tire_angle = data
self.publisher_steering.publish(msg)
def pubilsh_velocity(self, data1, data2, data3, data4):
msg = VelocityReport()
# 获取当前时间
# 秒
sec_ = int(time.time())
# 纳秒
nanosec_ = int((time.time()-sec_)*1e9)
msg.header.stamp = Time(sec = sec_,nanosec = nanosec_)
msg.header.frame_id = data1
msg.longitudinal_velocity = data2
msg.lateral_velocity = data3
msg.heading_rate = data4
self.publisher_velocity.publish(msg)
def main():
# 初始化
rclpy.init()
# 新建一个节点
node = TopicSubscriberPublisher()
# 启动接收CAN数据的线程
threading.Thread(target=receive_data, args=(node,)).start()
# 保持节点运行,检测是否收到退出指令(Ctrl+C)
rclpy.spin(node)
# 清理并关闭ros2节点
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
编写setup.py和launch文件
from setuptools import setup
package_name = 'can_ros2_bridge'
setup(
name=package_name,
version='0.0.0',
packages=[package_name],
# 安装文件
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
('share/' +package_name, ['launch/can.launch.py']),
('share/' +package_name, ['config/CarCAN.dbc']),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='car',
maintainer_email='[email protected]',
description='TODO: Package description',
license='TODO: License declaration',
tests_require=['pytest'],
# 可执行文件
entry_points={
'console_scripts': [
'cmd_vel_to_can = can_ros2_bridge.send_message:main',
],
},
)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
from launch import LaunchDescription
from launch_ros.actions import Node
import os
from ament_index_python.packages import get_package_share_directory
def generate_launch_description():
config = os.path.join(
get_package_share_directory('can_ros2_bridge'),
'CarCAN.dbc'
)
can_ros2_bridge = Node(
package='can_ros2_bridge',
executable='cmd_vel_to_can',
name='can',
parameters=[{'dbc': config},],
output="both"
)
return LaunchDescription(
[
can_ros2_bridge,
]
)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
修改静态IP(注意关掉WIFI),启动CAN,能成功控制底盘
四、相机驱动
4.1 安装驱动
本文使用的相机没有官方驱动,采用的相机驱动源码地址:http://iyenn.com/index/link?url=https://github.com/ros-drivers/usb_cam/tree/ros2,将代码下载下来放到工作空间src编译运行:
colcon build
source install/setup.bash
ros2 run usb_cam usb_cam_node_exe --ros-args --params-file src/usb_cam-ros2/config/params_1.yaml
# 或者
ros2 launch usb_cam camera.launch.py #但是这个运行可能有一些问题,我们在下一节重新写一个
- 1
- 2
- 3
- 4
- 5
再打开一个节点,显示图像:
ros2 run usb_cam show_image.py
- 1
如果是外置的相机,此时大概率无法驱动,因为相机默认挂载点是/dev/video0(但它一般是电脑自带的摄像头),查看相机挂载地址:
ls /dev/
- 1
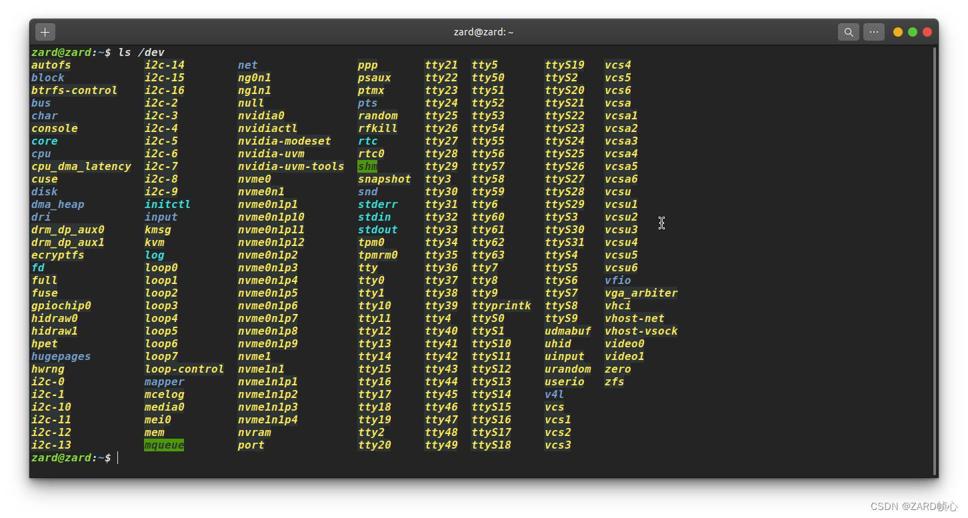
可以通过插拔相机判断挂载地址,我们是/dev/video2,在参数文件中修改video_device为/dev/video2,再次驱动即可看到外置相机的图像
然后再次运行,可以驱动相机了,相机话题为/image_raw
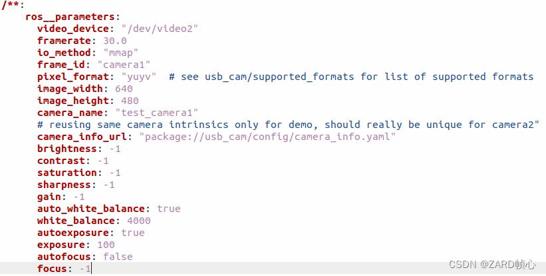
4.2 修改相机参数
上面简单的运行实际上可能无法适配你的相机(可以驱动但是效果很差),我们需要修改参数,新建一个参数文件(例如config/JR_HF868.yaml),内容如下:
/**:
ros__parameters:
# 设备挂载点
video_device: "/dev/video2"
# 帧率
framerate: 30.0
io_method: "mmap"
# 坐标系
frame_id: "camera"
# 像素格式
pixel_format: "mjpeg2rgb" # see usb_cam/supported_formats for list of supported formats
# 像素尺寸
image_width: 1920
image_height: 1080
# 相机名称
camera_name: "JR_HF868"
# 标定参数
camera_info_url: "package://usb_cam/config/camera_info.yaml"
# 亮度
brightness: 50
# 对比度
contrast: 50
# 饱和度
saturation: 50
# 清晰度
sharpness: 80
# 增益
gain: -1
# 白平衡
auto_white_balance: true
white_balance: 4000
# 曝光
autoexposure: true
exposure: 100
# 聚焦
autofocus: false
focus: -1
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
其中有几点需要注意的:
(1)将相机分辨率修改为1920*1080(或者你的相机支持的);
(2)将设备挂载点改成/dev/video2(或者自己查到的);
(3)默认的pixel_format,当相机运动过快,图片的运动畸变比较大,发现在运行相机节点的时候,会打印出相机支持的一些参数:
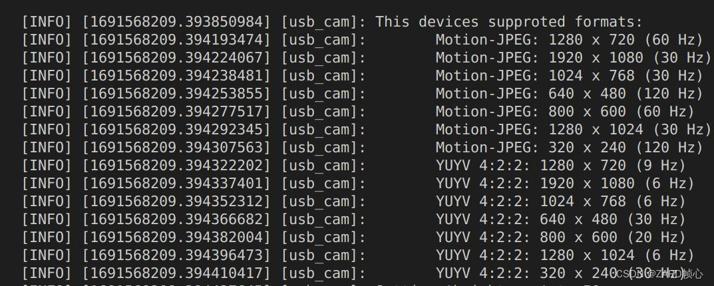
我们的相机在YUYV 4:2:2: 1920 x 1080这个参数下只支持6 Hz的帧率,相机在Motion-JPEG: 1920 x 1080这个参数下支持30 Hz的帧率,查找senser_driver/src/usb_cam-ros2/include/usb_cam/usb_cam.hpp文件,可以找到驱动支持的像素格式,有如下几种
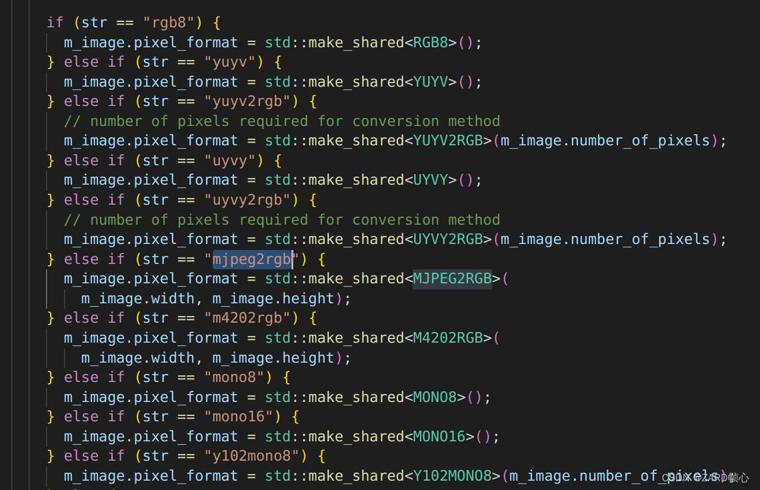
修改pixel_format参数,改成mjpeg2rgb
(4)修改亮度,对比度,饱和度等参数
新写一个启动文件(launch/JR_HF868.launch.py):
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
config = os.path.join(
get_package_share_directory('usb_cam'),
'config',
'JR_HF868.yaml'
)
return LaunchDescription([
Node(
package='usb_cam',
executable='usb_cam_node_exe',
name='usb_cam_node_exe',
parameters=[config]
),
])
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
然后再重新编译,运行节点,现在相机的图像像素比较高,而且快速运动的时候畸变也小:
source install/setup.bash
ros2 launch usb_cam JR_HF868.launch.py
- 1
- 2
五、GNSS驱动
GNSS是可选的,这里使用的是华测M620RTK模块驱动。
由于ROS2没有再封装串口库serial,因此需要手动安装serial:
git clone https://github.com/ZhaoXiangBox/serial
cd serial && mkdir build
cmake .. && make
sudo make install
- 1
- 2
- 3
- 4
Cmake配置:
set(CMAKE_INSTALL_RPATH /usr/local/lib)
find_package(serial REQUIRED)
ament_target_dependencies(exe "serial")
- 1
- 2
- 3
接下来编写串口通信,读取GNSS数据(根据CHCCGI610的ROS1代码修改而来)
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
#include "sensor_msgs/msg/nav_sat_fix.hpp"
#include
// initrd.img.oldCLEAR();
// printf("bytes in buf = %d
",numinbuf);
}
catch (serial::IOException &e)
{
std::cout << "Port crashed! Please check cable!" << std::endl;
getchar();
rclcpp::shutdown();
}
if (numinbuf > 0) // 串口缓冲区有数据
{
numgetted = ser.read(rbuf, numinbuf); // 串口缓冲区数据读到rbuf中
if (numgetted == numinbuf) // 取回的数据个数与缓冲区中有的数据个数相同,说明读串口成功
{
for (int i = 0; i < numgetted; i++) // 对收到的字符逐个处理
{
// 在一帧数据的接收过程中,只要遇到非$GPCHC帧头就重新开始
// 此处理具有最高优先级,会重置状态机
if (rbuf[i] == '$' && rbuf[i + 3] != 'G' && rbuf[i + 4] != 'G' && rbuf[i + 5] != 'A')
{
memset(OneFrame, 0, sizeof(OneFrame));
StateParser = 0;
break; // 中断循环
}
// 正常处理过程
switch (StateParser)
{
// 等待语句开始标志'$'
case 0:
if (rbuf[i] == '$' && rbuf[i + 3] == 'G' && rbuf[i + 4] == 'G' && rbuf[i + 5] == 'A') // 收到语句开始标志
{
memset(OneFrame, 0, sizeof(OneFrame));
OneFrame[0] = '$';
CntByte = 1; // 开始对帧长度的计数
StateParser = 1;
}
break;
// 寻找帧头"$GPGGA,"
case 1:
OneFrame[CntByte] = rbuf[i];
CntByte++; // 指向下一个空位
if (rbuf[i] == ',')
{
if (strncmp(OneFrame, "$GPGGA,", 7) == 0)
{
CntDelimiter = 0; // 分隔符计数从0开始
PosDelimiter[0] = CntByte - 1; // 记录分隔符在OneFrame中的位置
// std::cout<<"PosDelimiter[0]"<
StateParser = 2;
// std::cout<<"寻找帧头$GPGGA完成"<
}
else // 帧头错误
{
memset(OneFrame, 0, sizeof(OneFrame));
StateParser = 0;
// std::cout<<"寻找帧头$GPGGA失败"<
}
}
break;
// 接收各数据域
case 2:
// std::cout<<"开始接受各个数据域"<
OneFrame[CntByte] = rbuf[i];
// std::cout<<"接受字符"<
CntByte++; // 指向下一个空位
if (rbuf[i] == ',' || rbuf[i] == '*')
{
CntDelimiter++; // 分隔符计数
// std::cout<<"分隔符个数:"<
PosDelimiter[CntDelimiter] = CntByte - 1; // 记下分隔符位置
// std::cout<<"PosDelimiter["<
field_len[CntDelimiter - 1] = PosDelimiter[CntDelimiter] - PosDelimiter[CntDelimiter - 1] - 1;
// std::cout<<"第"<
if (CntDelimiter == 14) // 0-14,共15个分隔符,开始数据解析
{
// 计算出每个字段的长度
for (int j = 0; j <= 13; j++) // 0-13,22个字段
{
field_len[j] = PosDelimiter[j + 1] - PosDelimiter[j] - 1;
// std::cout<<"第"<
}
if (field_len[1] > 0)
{
memset(temp_field, 0, sizeof(temp_field));
strncpy(temp_field, &OneFrame[PosDelimiter[1] + 1], field_len[1]);
int temp = (int)(atof(temp_field) / 100);
gnss_msg->latitude = temp + (atof(temp_field) - temp * 100) / 60;
}
if (field_len[3] > 0)
{
memset(temp_field, 0, sizeof(temp_field));
strncpy(temp_field, &OneFrame[PosDelimiter[3] + 1], field_len[3]);
int temp = (int)(atof(temp_field) / 100);
gnss_msg->longitude = temp + (atof(temp_field) - temp * 100) / 60;
}
if (field_len[5] > 0)
{
memset(temp_field, 0, sizeof(temp_field));
strncpy(temp_field, &OneFrame[PosDelimiter[5] + 1], field_len[5]);
gnss_msg->status.status = atof(temp_field);
}
if (field_len[6] > 0)
{
memset(temp_field, 0, sizeof(temp_field));
strncpy(temp_field, &OneFrame[PosDelimiter[6] + 1], field_len[6]);
gnss_msg->status.service = atof(temp_field);
}
if (field_len[7] > 0)
{
memset(temp_field, 0, sizeof(temp_field));
strncpy(temp_field, &OneFrame[PosDelimiter[7] + 1], field_len[7]);
gnss_msg->position_covariance[0] = pow(atof(temp_field), 2);
gnss_msg->position_covariance[4] = pow(atof(temp_field), 2);
gnss_msg->position_covariance[8] = pow(atof(temp_field), 2);
}
if (field_len[8] > 0)
{
memset(temp_field, 0, sizeof(temp_field));
strncpy(temp_field, &OneFrame[PosDelimiter[8] + 1], field_len[8]);
gnss_msg->altitude = atof(temp_field);
}
StateParser = 3;
}
}
break;
// 校验和第一个字符
case 3:
OneFrame[CntByte] = rbuf[i];
CntByte++; // 指向下一个空位
if (rbuf[i - 1] == '*' && ((rbuf[i] >= '0' && rbuf[i] <= '9') || (rbuf[i] >= 'A' && rbuf[i] <= 'F'))) // 校验和字节应是一个十六进制数
{
StateParser = 4;
}
else
{
memset(OneFrame, 0, sizeof(OneFrame));
StateParser = 0;
}
break;
// 校验和第二个字符
case 4:
OneFrame[CntByte] = rbuf[i];
CntByte++; // 指向下一个空位
if ((rbuf[i] >= '0' && rbuf[i] <= '9') || (rbuf[i] >= 'A' && rbuf[i] <= 'F')) // 校验和字节应是一个十六进制数
{
// 检查校验
cscomputed = GetXorChecksum((char *)(OneFrame + 1), CntByte - 4); // 计算得到的校验,除去$*hh共6个字符 =0x0d
case 5:
OneFrame[CntByte] = rbuf[i];
CntByte++; // 指向下一个空位
if (rbuf[i] == '
')
{
StateParser = 6;
}
else
{
memset(OneFrame, 0, sizeof(OneFrame));
StateParser = 0;
}
break;
// 等待结束标志=0x0a
case 6:
OneFrame[CntByte] = rbuf[i];
gnss_msg->header.stamp = this->get_clock()->now(); // ros时刻
gnss_msg->header.frame_id = "gnss_link";
gnss_pub_->publish(std::move(gnss_msg)); // 发布nav消息
// std::cout<<"发布成功"<
memset(OneFrame, 0, sizeof(OneFrame));
StateParser = 0;
break;
default:
memset(OneFrame, 0, sizeof(OneFrame));
StateParser = 0;
break;
} // switch(StateParser)
} // for(int i=0; i
} // if(numgetted == numinbuf)
}
loop_rate.sleep();
}
}
private:
// 全局变量
serial::Serial ser; // 声明串口对象
int StateParser; // 解析处理状态机状态
int CntByte; // 用于记录OneFrame中的实际数据长度
int PosDelimiter[15]; // 用于记录分隔符位置
int field_len[14]; // 字符串长度
int CntDelimiter; // 分隔符计数
unsigned char rbuf[500]; // 接收缓冲区,要足够大,需要通过测试得出
char OneFrame[250]; // 存放一帧数据,长度大于115即可,这里取200
char str[3];
unsigned int tmpint;
int cscomputed; // 计算得到的校验,除去$*hh共6个字符 - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
- 330
- 331
- 332
- 333
- 334
- 335
- 336
- 337
- 338
- 339
- 340
- 341
- 342
- 343
- 344
- 345
- 346
- 347
- 348
- 349
- 350
- 351
- 352
启动,再订阅GNSS数据可以看到GNSS数据
source install/setup.bash
ros2 launch m620_driver m620.launch.py
- 1
- 2
评论记录:
回复评论: