
Azure Kinect
最近想做一个物体的三维重建,就买了微软最新的深度相机,功能相比前两代虽然有了很大提升,但是可参考的资料确很少,最简单的图像获取,点云图像保存,都费了我一番功夫最后再参考了现有的资料以及结合相机的源码,完成了图像保存以及点云获取保存
直接上全部的代码
我用的是VS2017专业版,OpenCV4.2,Microsoft.Azure.Kinect.Sensor.1.4.1。
//C++
#include (xyzImage.get_stride_bytes()));
//cv_xyzImage.convertTo(cv_xyzImage_32F, CV_32FC3, 1.0 / 1000, 0);// 转为float,同时将单位从 mm 转换为 m.
//cv::imshow("xyzimage", cv_xyzImage_32F);
//show image
cv::imshow("color", cv_rgbImage_no_alpha);
cv::imshow("depth", cv_depth_8U);
cv::imshow("ir", cv_irImage_8U);
//save image
double time_rgb = static_cast<double>(std::chrono::duration_cast<std::chrono::microseconds>(
rgbImage.get_device_timestamp()).count());
std::string filename_rgb = std::to_string(time_rgb / 1000000) + ".png";
double time_d = static_cast<double>(std::chrono::duration_cast<std::chrono::microseconds>(
depthImage.get_device_timestamp()).count());
std::string filename_d = std::to_string(time_d / 1000000) + ".png";
double time_ir = static_cast<double>(std::chrono::duration_cast<std::chrono::microseconds>(
irImage.get_device_timestamp()).count());
std::string filename_ir = std::to_string(time_ir / 1000000) + ".png";
imwrite("./rgb/" + filename_rgb, cv_rgbImage_no_alpha);
imwrite("./depth/" + filename_d, cv_depth_8U);
imwrite("./ir/" + filename_ir, cv_irImage_8U);
//const int32_t TIMEOUT_IN_MS = 1000;
//std::string file_name;
//uint32_t device_count = 0;
//k4a_device_t device1 = NULL;
//k4a_device_configuration_t config1 = K4A_DEVICE_CONFIG_INIT_DISABLE_ALL;
//k4a_capture_t capture1 = NULL;
//k4a_image_t depth_image = NULL;
//k4a_calibration_t calibration1;
k4a_image_t xy_table = NULL;
k4a_image_t point_cloud = NULL;
int point_count = 0;
double time_point = static_cast<double>(std::chrono::duration_cast<std::chrono::microseconds>(
rgbImage.get_device_timestamp()).count());
std::string filename_point = std::to_string(time_point / 1000000) + ".ply";
//file_name = "./pointcloud.ply";
/* device_count1 = k4a_device_get_installed_count();
if (device_count1 == 0)
{
printf("No K4A devices found
");
return 0;
}*/
/*if (K4A_RESULT_SUCCEEDED != k4a_device_open(K4A_DEVICE_DEFAULT, &device))
{
printf("Failed to open device
");
}*/
/* config1.depth_mode = K4A_DEPTH_MODE_WFOV_2X2BINNED;
config1.camera_fps = K4A_FRAMES_PER_SECOND_30;*/
/* k4a_device_get_calibration(device1, config1.depth_mode, config1.color_resolution, &calibration1);*/
k4a_image_create(K4A_IMAGE_FORMAT_CUSTOM,
k4aCalibration.depth_camera_calibration.resolution_width,
k4aCalibration.depth_camera_calibration.resolution_height,
k4aCalibration.depth_camera_calibration.resolution_width * (int)sizeof(k4a_float2_t),
&xy_table);
create_xy_table(&k4aCalibration, xy_table);
k4a_image_create(K4A_IMAGE_FORMAT_CUSTOM,
k4aCalibration.depth_camera_calibration.resolution_width,
k4aCalibration.depth_camera_calibration.resolution_height,
k4aCalibration.depth_camera_calibration.resolution_width * (int)sizeof(k4a_float3_t),
&point_cloud);
/* k4a_device_start_cameras(device, &config);
k4a_device_get_capture(device, &capture, TIMEOUT_IN_MS);*/
//depth_image = k4a_capture_get_depth_image(capture1);
if (depthImage == 0)
{
printf("Failed to get depth image from capture
");
}
generate_point_cloud(depthImage, xy_table, point_cloud, &point_count);
write_point_cloud(filename_point.c_str(), point_cloud, point_count);
/* k4a_image_release(depthImage);
k4a_capture_release(capture);*/
k4a_image_release(xy_table);
k4a_image_release(point_cloud);
//returnCode = 0;
//k4a_device_close(device1);
std::cout << "Acquiring!" << endl;
//写入depth.txt, rgb.txt文件
rgb_out << std::to_string(time_rgb / 1000000) << " " << "rgb/" << filename_rgb << endl;
d_out << std::to_string(time_d / 1000000) << " " << "depth/" << filename_d << endl;
ir_out << std::to_string(time_ir / 1000000) << " " << "ir/" << filename_ir << endl;
rgb_out << flush;
d_out << flush;
ir_out << flush;
k4aTransformation.destroy();
cv_rgbImage_with_alpha.release();
cv_rgbImage_no_alpha.release();
cv_depth.release();
cv_depth_8U.release();
cv_irImage.release();
cv_irImage_8U.release();
capture.reset();
if (cv::waitKey() == 'q')
{//按键采集,用户按下'q',跳出循环,结束采集
std::cout << "----------------------------------" << std::endl;
std::cout << "------------- closed -------------" << std::endl;
std::cout << "----------------------------------" << std::endl;
break;
}
}
else {
std::cout << "false: K4A_WAIT_RESULT_TIMEOUT." << std::endl;
}
}
cv::destroyAllWindows();
rgb_out << flush;
d_out << flush;
ir_out << flush;
rgb_out.close();
d_out.close();
ir_out.close();
// 释放,关闭设备
rgbImage.reset();
depthImage.reset();
irImage.reset();
capture.reset();
device.close();
return 1;
}

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
- 330
- 331
- 332
- 333
- 334
- 335
- 336
- 337
- 338
- 339
- 340
- 341
- 342
- 343
- 344
- 345
- 346
- 347
- 348
- 349
- 350
- 351
- 352
- 353
- 354
- 355
- 356
- 357
- 358
- 359
- 360
- 361
- 362
- 363
- 364
- 365
- 366
- 367
- 368
- 369
- 370
- 371
- 372
- 373
- 374
- 375
- 376
- 377
- 378
- 379
- 380
- 381
- 382
- 383
- 384
- 385
- 386
- 387
- 388
- 389
- 390
- 391
- 392
- 393
- 394
- 395
- 396
- 397
- 398
- 399
- 400
- 401
- 402
- 403
- 404
- 405
- 406
- 407
- 408
- 409
- 410
- 411
- 412
- 413
- 414
- 415
- 416
- 417
- 418
- 419
- 420
- 421
- 422
- 423
- 424
- 425
- 426
- 427
- 428
- 429
- 430
- 431
- 432
- 433
- 434
- 435
- 436
- 437
- 438
- 439
- 440
- 441
- 442
- 443
- 444
- 445
- 446
- 447
- 448
- 449
- 450
- 451
- 452
- 453
- 454
- 455
- 456
- 457
- 458
- 459
- 460
- 461
- 462
- 463
- 464
- 465
- 466
- 467
- 468
- 469
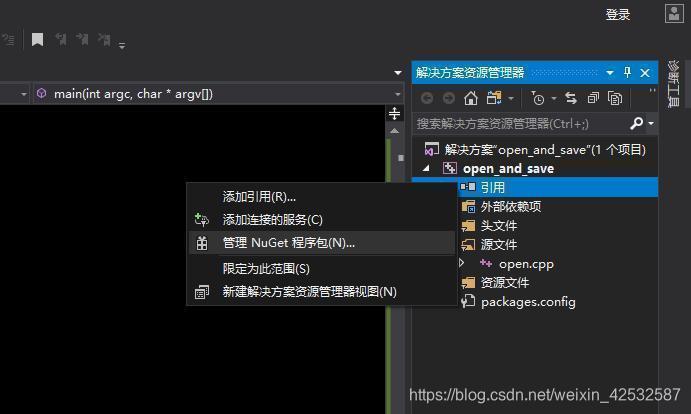
相关包的安装
本文用的OpenCV4.2以及深度相机的SDK包是直接通过NuGet程序包直接安装的,下面是每步的安装截图
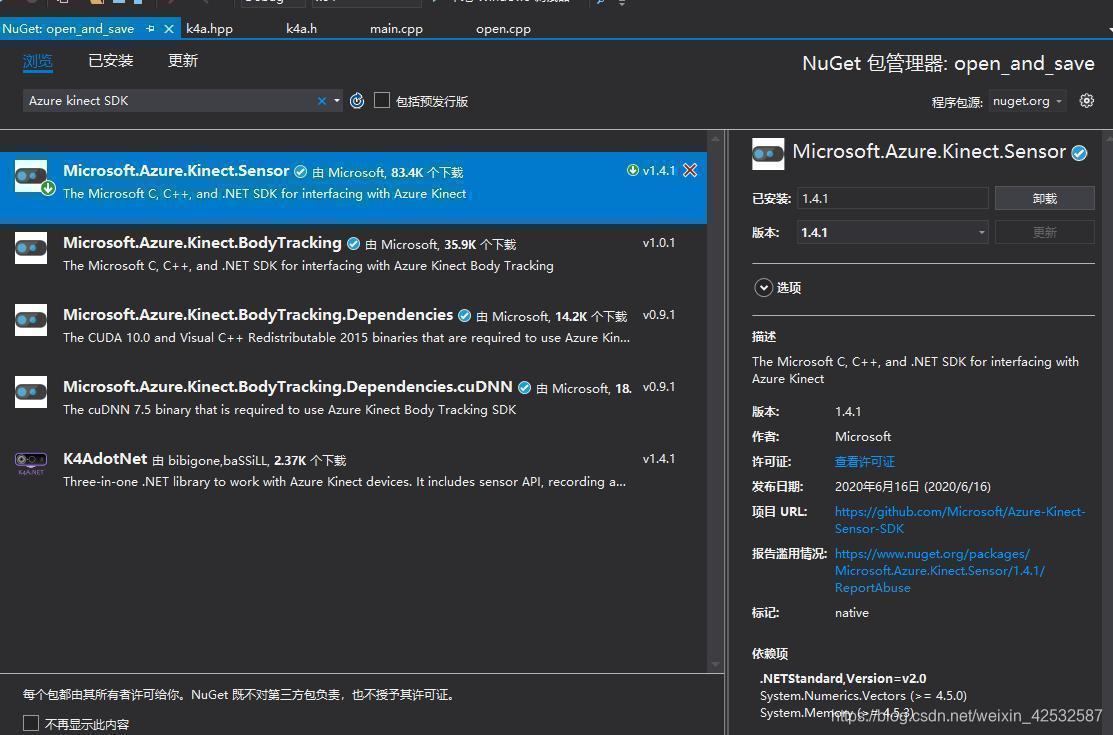
同样,OpenCV也是相同的方法,但是当我安装OpenCV时,用低版本时总是报错,当用到4.2时才正常,我看网上的说是OpenCV低版本不支持VS2017,我也不知是不是这个原因,反正用到高版本时就行了,用NuGet直接安装OpenCV还有个好处是省了各种配置,只要装上就可用
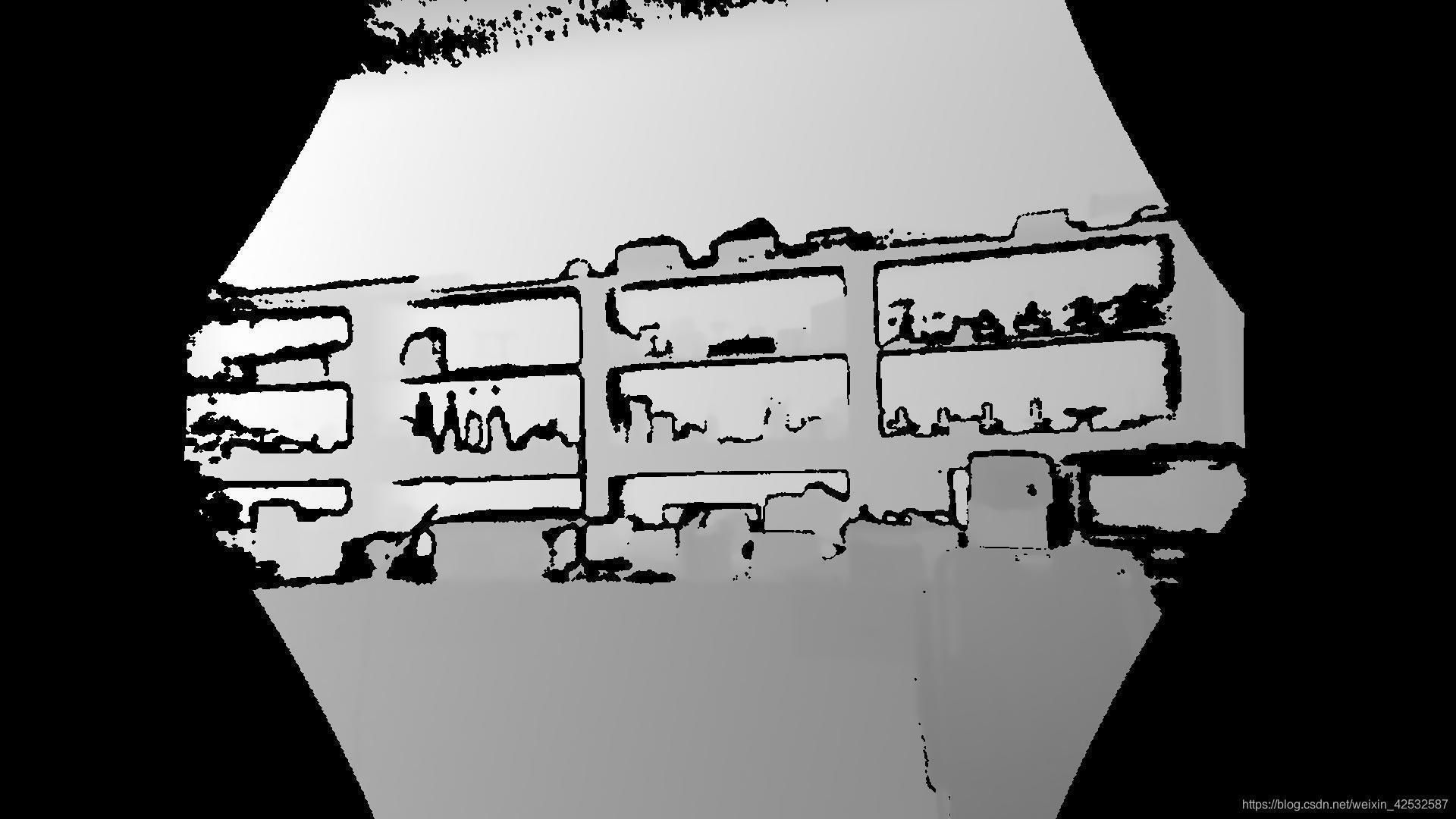
程序运行结果
放几张程序运行结果图


深度图的显示是根据这篇博客,采用归一化的方法进行显示保存,最后保存的图像依然是16位,后面尝试微软演示(5,6,5)的显示方式
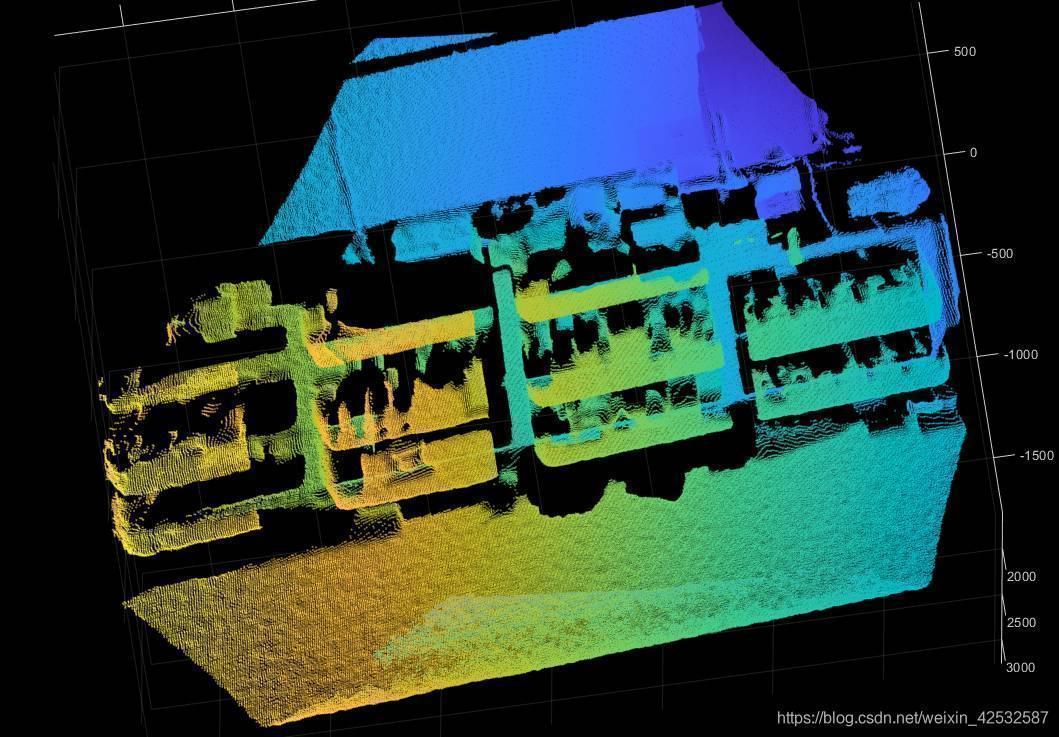
点云可视化是利用保存的.ply文件进行可视化的,C++对我一个外行太不友好了
matlab显示代码如下
ptCloud = pcread('F:Depth_image_C++open_and_saveopen_and_save14.551055.ply'); % read from a PLY file
figure
pcshow(ptCloud);
title('Original Data');
- 1
- 2
- 3
- 4
文件保存
文件保存需要分别新建几个文件夹由于保存文件,如图
最后
这算是我自己学习过程中的一个记录,如果能够对你们有帮助那是更好了。
https://blog.csdn.net/qq_40936780/article/details/102634734?utm_medium=distribute.pc_relevant.none-task-blog-title-3&spm=1001.2101.3001.4242
https://blog.csdn.net/Zlp19970106/article/details/107120743/?utm_medium=distribute.pc_relevant.none-task-blog-title-2&spm=1001.2101.3001.4242
还有篇参考博客找不到了,等找到了再添加吧
评论记录:
回复评论: