
前言
读TensorFlow相关代码看到了STN的应用,搜索以后发现可替代池化,增强网络对图像变换(旋转、缩放、偏移等)的抗干扰能力,简单说就是提高卷积神经网络的空间不变性。
国际惯例,参考博客:
理解Spatial Transformer Networks
Deep Learning Paper Implementations: Spatial Transformer Networks - Part I
Deep Learning Paper Implementations: Spatial Transformer Networks - Part II
将STN加入网络训练的一个关于图像隐写术的案例:StegaStamp
理论
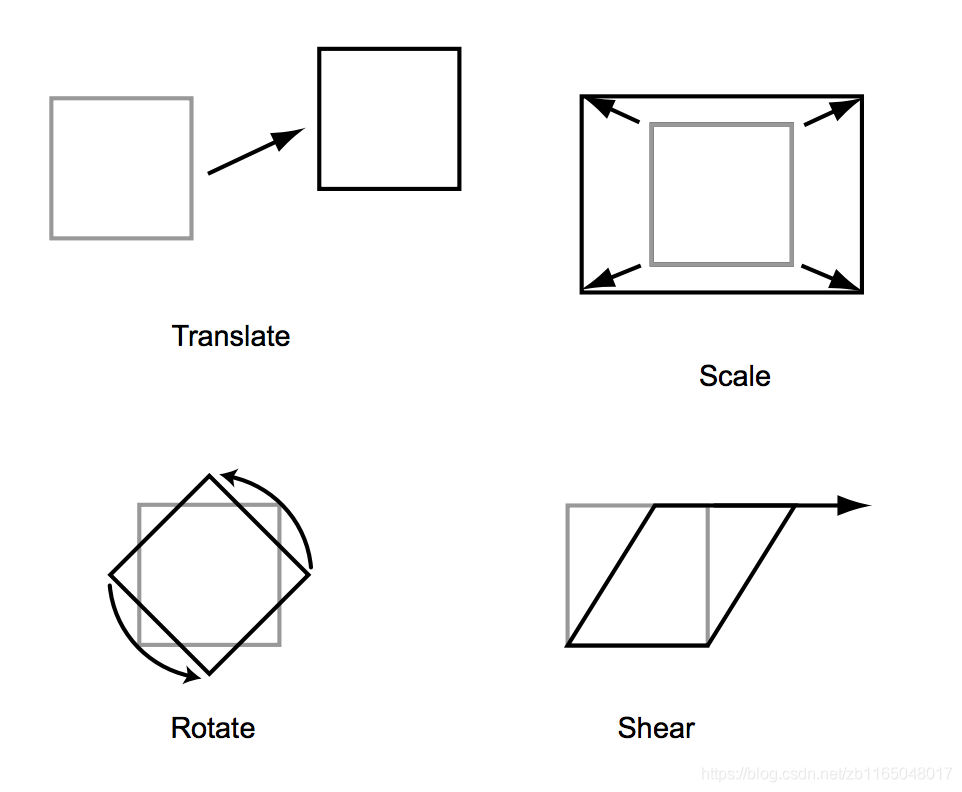
图像变换
因为图像的本质就是矩阵,那么图像变换就是矩阵变换,先复习一下与图像相关的矩阵变换。假设 M M M为变换矩阵, N N N为图像,为了简化表达,设 M M M的维度是 ( 2 , 2 ) (2,2) (2,2), N N N代表像素点坐标,则维度是 ( 2 , 1 ) (2,1) (2,1),以下操作均为对像素位置的调整操作,而非对像素值的操作。
-
缩放
M × N = [ p 0 0 q ] × [ x y ] = [ p x q y ] M imes N=[pamp;00amp;q]imes [xy][p0amp;0amp;q] =[pxqy][xy] M×N=[p00q]×[xy]=[pxqy][pxqy] -
旋转:绕原点顺时针旋转 θ heta θ角
M × N = [ cos θ − sin θ sin θ cos θ ] × [ x y ] = [ x cos θ − y sin θ x sin θ + y cos θ ] M imes N=[cosθamp;−sinθsinθamp;cosθ]imes [xy][cosθsinθamp;−sinθamp;cosθ] =[xcosθ−ysinθxsinθ+ycosθ]M×N=[cosθsinθ−sinθcosθ]×[xy]=[xcosθ−ysinθxsinθ+ycosθ] -
错切(shear):类似于将字的正体变成斜体
M × N = [ 1 m n 1 ] × [ x y ] = [ x + m y y + n x ] M imes N=[1amp;mnamp;1]imes [xy]=[x+myy+nx]M×N=[1nm1]×[xy]=[x+myy+nx] -
平移:要转换为齐次矩阵做平移
M ′ × N ′ = [ 1 0 a 0 1 b ] × [ x y 1 ] = [ x + a y + b ] M' imes N'=[1amp;0amp;a0amp;1amp;b]imes [xy1]=[x+ay+b]M′×N′=[1001ab]×⎣⎡xy1⎦⎤=[x+ay+b]
盗用参考博客的图解就是:
注意,我们进行多次变换的时候有多个变换矩阵,如果每次计算一个变换会比较耗时,参考矩阵的乘法特性,我们可以先将变换矩阵相乘,得到一个完整的矩阵代表所有变换,最后乘以图像,就可将图像按照组合变换顺序得到变换图像。这个代表一系列的变换的矩阵通常表示为:
M
=
[
a
b
c
d
e
f
]
M=[aamp;bamp;cdamp;eamp;f]
因为直接计算位置的值,很可能得到小数,比如将
(
3
,
3
)
(3,3)
(3,3)的图像放大到
(
9
,
9
)
(9,9)
(9,9),也就是放大3倍,那么新图像
(
8
,
8
)
(8,8)
(8,8)位置的像素就是原图
(
8
/
3
,
8
/
3
)
(8/3,8/3)
(8/3,8/3)位置的像素,但是像素位置不可能是小数,因而出现了解决方案:双线性插值
双线性插值
先复习一下线性插值,直接去看之前写的这篇博客,知道
(
x
1
,
y
1
)
(x_1,y_1)
(x1,y1)与
(
x
2
,
y
2
)
(x_2,y_2)
(x2,y2),求
(
x
1
,
x
2
)
区
间
内
的
点
(x_1,x_2)区间内的点
(x1,x2)区间内的点
x
x
x位置的y值,结果是:
y
=
x
−
x
2
x
1
−
x
2
y
1
+
x
−
x
1
x
2
−
x
1
y
2
y=frac{x-x_2}{x_1-x_2}y_1+frac{x-x_1}{x_2-x_1}y_2
y=x1−x2x−x2y1+x2−x1x−x1y2
可以发现线性插值是针对一维坐标的,即给
x
x
x求
y
y
y,但是双线性插值是针对二维坐标点的,即给
(
x
,
y
)
(x,y)
(x,y)求值
Q
Q
Q。方法是先在
x
x
x轴方向做两次线性插值,再在
y
y
y轴上做一次线性插值。
设需要求 ( x , y ) (x,y) (x,y)处的值,我们需要预先知道其附近四个坐标点及其对应的值,如:
- ( x , y ) (x,y) (x,y)左下角坐标为 ( x 1 , y 1 ) (x_1,y_1) (x1,y1),值为 Q 1 Q_1 Q1
- ( x , y ) (x,y) (x,y)右下角坐标为 ( x 2 , y 1 ) (x_2,y_1) (x2,y1), 值为 Q 2 Q_2 Q2
- ( x , y ) (x,y) (x,y)左上角坐标为 ( x 1 , y 2 ) (x_1,y_2) (x1,y2), 值为 Q 3 Q_3 Q3
- ( x , y ) (x,y) (x,y)右上角坐标为 ( x 2 , y 2 ) (x_2,y_2) (x2,y2),值为 Q 4 Q_4 Q4
首先对下面的
(
x
1
,
y
1
)
(x_1,y_1)
(x1,y1)和
(
x
2
,
y
1
)
(x_2,y_1)
(x2,y1)做线性插值,方法是把它两看做一维坐标
(
x
1
,
Q
1
)
(x_1,Q_1)
(x1,Q1)和
(
x
2
,
Q
2
)
(x_2,Q2)
(x2,Q2),得到:
P
1
=
x
−
x
2
x
1
−
x
2
Q
1
+
x
−
x
1
x
2
−
x
1
Q
2
P_1=frac{x-x_2}{x_1-x_2}Q_1+frac{x-x_1}{x_2-x_1}Q_2
P1=x1−x2x−x2Q1+x2−x1x−x1Q2
同理得到上面的两个坐标
(
x
1
,
y
2
)
(x_1,y_2)
(x1,y2)与
(
x
2
,
y
2
)
(x_2,y_2)
(x2,y2)的插值结果,也就是
(
x
1
,
Q
3
)
(x_1,Q_3)
(x1,Q3)和
(
x
2
,
Q
4
)
(x_2,Q_4)
(x2,Q4)的线性插值结果:
P
2
=
x
−
x
2
x
1
−
x
2
Q
3
+
x
−
x
1
x
2
−
x
1
Q
4
P_2=frac{x-x_2}{x_1-x_2}Q_3+frac{x-x_1}{x_2-x_1}Q_4
P2=x1−x2x−x2Q3+x2−x1x−x1Q4
再对
(
y
1
,
P
1
)
(y_1,P_1)
(y1,P1)和
(
y
2
,
P
2
)
(y_2,P_2)
(y2,P2)做线性插值:
P
=
x
−
y
2
y
1
−
y
2
P
1
+
y
−
y
1
y
2
−
y
1
P
2
P=frac{x-y_2}{y_1-y_2}P_1+frac{y-y_1}{y_2-y_1}P_2
P=y1−y2x−y2P1+y2−y1y−y1P2
解决上面图像变换的问题,假设变换后的坐标不是整数,那么就选择这个坐标四个角的坐标的双线性插值的结果,比如
(
8
/
3
,
8
/
3
)
(8/3,8/3)
(8/3,8/3)位置的像素就是
(
2
,
2
)
,
(
3
,
2
)
,
(
2
,
3
)
,
(
3
,
3
)
(2,2),(3,2),(2,3),(3,3)
(2,2),(3,2),(2,3),(3,3)位置像素的双线性插值结果。
总之就是先计算目标图像像素在源图像中的位置,然后得到源图像位置是小数,针对小数位置的四个顶点做双线性插值。
上面就是STN做的工作,也可以发现STN接受的参数就是6个,接下来看看为什么STN能提高卷积网络的旋转、平移、缩放不变性。
总结一下:
图像处理中的仿射变换通常包含三个步骤:
- 创建由 ( x , y ) (x,y) (x,y)组成的采样网格,比如 ( 400 , 400 ) (400,400) (400,400)的灰度图对应创建一个同样大小的网格。
- 将变换矩阵应用到采样网格上
- 使用插值技术从原图中计算变换图的像素值
池化
强行翻译一波这篇文章关于池化的部分,建议看原文,这里摘取个人认为重要部分:
池化在某种程度上增加了模型的空间不变性,因为池化是一种下采样技术,减少了每层特征图的空间大小,极大减少了参数数量,提高了运算速度。
池化提供的不变性确切来说是什么?池化的思路是将一个图像切分成多个单元,这些复杂单元被池化以后得到了可以描述输出的简单的单元。比如有3张不同方向的数字7的图像,池化是通过图像上的小网格来检测7,不受7的位置影响,因为通过聚集的像素值,我们得到的信息大致一样。个人觉得,作者的本意是单看小网格,是有很多一样的块。
池化的缺点在于:
- 丢失了75%的信息(应该是 ( 2 , 2 ) (2,2) (2,2)的最大值池化方法),意味着我们一定丢了是精确的位置信息。有人会问,这样可以增加空间鲁棒性哇。然而,对于视觉识别人物,空间信息是非常重要的。比如分类猫的时候,知道猫的胡须的位置相对于鼻子的位置有可能很重要,但是如果使用最大池化,可能丢失了这个信息。
- 池化是局部的且预定义好的。一个小的接受域,池化操作的影响仅仅是针对更深的网络层(越深感受野越大),也就是中间的特征图可能受到严重的输入失真的影响。我们不能任意增加接受域,这样会过度下采样。
主要结论就是卷积网络对于相对大的输入失真不具有不变性。
The pooling operation used in convolutional neural networks is a big mistake and the fact that it works so well is a disaster. (Geoffrey Hinton, Reddit AMA)
- 1
STN理论
STN的全称是Spatial Transformer Networks,空间变换网络。时空变换机制就是通过给CNN提供显式的空间变换能力,以解决上述池化出现的问题。有三种特性:
- Modular:STN能够被插入到网络的任意地方,仅需很小的调整
- differentiable:STN可以通过反向传播训练
- dynamic:STN是对每个输入样本的一个特征图做空间变换,而池化是针对所有样本。
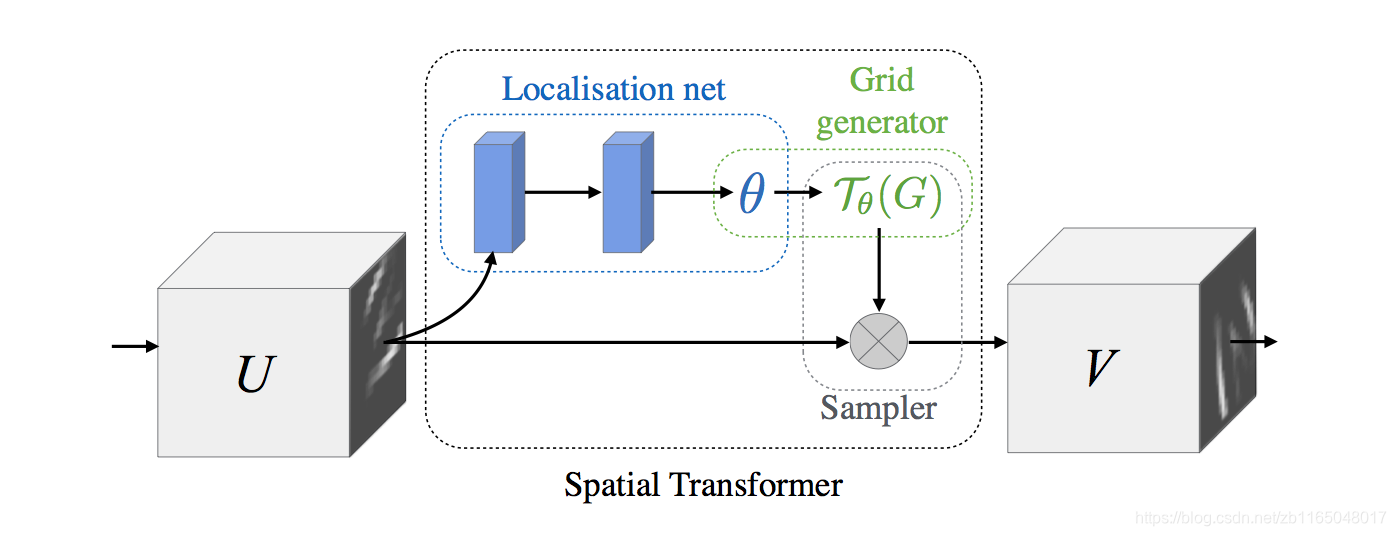
上图是STN网络的主要框架。所以到底什么是空间变换?通过结构图可发现模型包含三部分:localisation network、grid generator、sampler。
Localisation Network
主要是提取被应用到输入特征图上的仿射变换的参数 θ heta θ,网络结构是:
- 输入:大小为 ( H , W , C ) (H,W,C) (H,W,C)的特征图 U U U
- 输出:大小为 ( 6 , 1 ) (6,1) (6,1)的变换矩阵 θ heta θ
- 结构:全连接或者卷积
Parametrised Sampling Grid
输出参数化的采样网格,是一系列的点,每个输入特征图能够产生期望的变换输出。
具体就是:网格生成器首先产生于输入图像
U
U
U大小相同的标准网格,然后将仿射变换应用到网格。公式表达即,假设输入图的索引是
(
x
t
,
y
t
)
(x^t,y^t)
(xt,yt),将
θ
heta
θ代表的变换应用到坐标上得到新的坐标:
[
x
s
y
s
]
=
[
θ
1
θ
2
θ
3
θ
4
θ
5
θ
6
]
×
[
x
t
y
t
1
]
[xsys]
Differentiable Image Sampling
依据输入特征图和参数化采样网格,我们可以利用双线性插值方法获得输出特征图。注意,这一步我们可以通过制定采样网格的大小执行上采样或者下采样,很像池化。

左图使用了单位变换,右图使用了旋转的仿射变换。
【注】因为双线性插值是可微的,所以STN可以作为训练网络的一部分。
代码
利用STN前向过程做图像变换
GitHub上有作者提供了源码,也可以用pip直接安装。
代码直接贴了,稍微改了一点点:
导入包
import tensorflow as tf
import cv2
import numpy as np
from stn import spatial_transformer_network as transformer
- 1
- 2
- 3
- 4
- 5
读入图像,转换为四维矩阵:
img=cv2.imread('test_img.jpg')
img=np.array(img)
H,W,C=img.shape
img=img[np.newaxis,:]
print(img.shape)
- 1
- 2
- 3
- 4
- 5
旋转变换的角度
degree=np.deg2rad(45)
theta=np.array([
[np.cos(degree),-np.sin(degree),0],
[np.sin(degree),np.cos(degree),0]
])
- 1
- 2
- 3
- 4
- 5
构建网络结构
x=tf.placeholder(tf.float32,shape=[None,H,W,C])
with tf.variable_scope('spatial_transformer'):
theta=theta.astype('float32')
theta=theta.flatten()
loc_in=H*W*C #输入维度
loc_out=6 #输出维度
W_loc=tf.Variable(tf.zeros([loc_in,loc_out]),name='W_loc')
b_loc=tf.Variable(initial_value=theta,name='b_loc')
#运算
fc_loc=tf.matmul(tf.zeros([1,loc_in]),W_loc)+b_loc
h_trans=transformer(x,fc_loc)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
把图像喂进去,并显示图像
init=tf.global_variables_initializer()
with tf.Session() as sess:
sess.run(init)
y=sess.run(h_trans,feed_dict={x:img})
print(y.shape)
y=np.squeeze(np.array(y,dtype=np.uint8))
print(y.shape)
cv2.imshow('trasformedimg',y)
cv2.waitKey()
cv2.destroyAllWindows()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11

重点关注网络构建:
权重w_loc是全零的大小为 ( H W C , 6 ) (HWC,6) (HWC,6)的矩阵,偏置b_loc是大小为 ( 1 , 6 ) (1,6) (1,6)的向量,这样经过运算
fc_loc=tf.matmul(tf.zeros([1,loc_in]),W_loc)+b_loc
- 1
得到的其实就是我们指定的旋转角度对应的6维变换参数,最后利用变换函数transformer执行此变换就行了。
将STN加入网络中训练
主要参考StegaStamp作者的写法,这里做STN部分加入网络的方法:
输入一张图片到如下网络结构(Keras网络结构搭建语法):
stn_params = Sequential([
Conv2D(32, (3, 3), strides=2, activation='relu', padding='same'),
Conv2D(64, (3, 3), strides=2, activation='relu', padding='same'),
Conv2D(128, (3, 3), strides=2, activation='relu', padding='same'),
Flatten(),
Dense(128, activation='relu')
])
- 1
- 2
- 3
- 4
- 5
- 6
- 7
得到
(
1
,
128
)
(1,128)
(1,128)维的向量,其实用一个网络替换上面前向计算中的loc_in,目的是为了得到二维图像对应的一维信息
后面的过程就和前向计算一样了,定义权重和偏置:
W_fc1 = tf.Variable(tf.zeros([128, 6]), name='W_fc1')
b_fc1 = tf.Variable(initial_value=initial, name='b_fc1')
- 1
- 2
然后利用一维信息得到图像变换所需的6个值:
x = tf.matmul(stn_params, self.W_fc1) + self.b_fc1
- 1
最后利用STN库将变换应用到图像中,得到下一层网络结构的输入
transformed_image = stn_transformer(image, x, [self.height, self.width, 3])
- 1
可以看出,STN加入到网络后,训练参数有:
- 二维图像到一维特征向量的卷积+全连接网络的权重和偏置
- 一维向量到6维变换参数的权重和偏置
总结
通篇就是对池化方案的改变,使用STN能够增加网络的变换不变性,比池化的效果更好。
代码:
链接:https://pan.baidu.com/s/1kDs9T-Mf1F_mzQyvslcROA
提取码:crdu
评论记录:
回复评论: