
# usr/bin/env python
# coding: utf-8
##################### 对图像进行变换(旋转)
# 2018年6月17日07:33:54
import cv2
import numpy as np
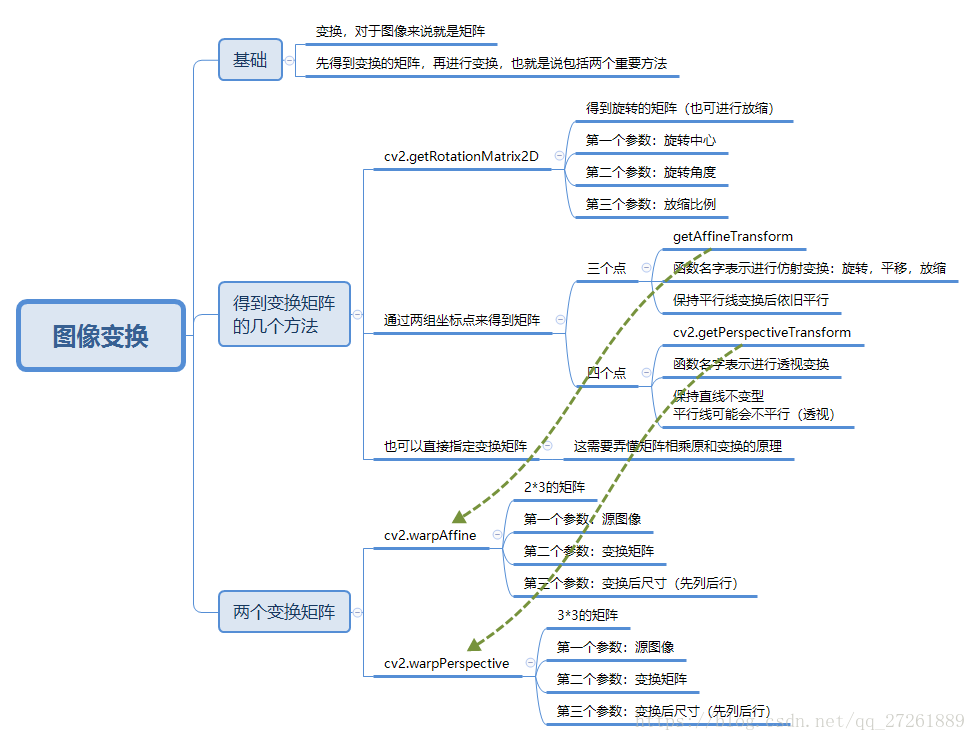
# 这里说一下旋转的opencv中为旋转提供的三个要素
# 旋转的中心点(center)
# 旋转角度()
# 旋转后进行放缩
# 我们可以通过cv2.getRotationMatrix2D函数得到转换矩阵
img = cv2.imread('cat.jpg')
rows,cols,_ = img.shape
matrix = cv2.getRotationMatrix2D((cols/2,rows/2),90,1)
# 得到变换的矩阵,通过这个矩阵再利用warpAffine来进行变换
# 第一个参数就是旋转中心,元组的形式,这里设置成相片中心
# 第二个参数90,是旋转的角度
# 第三个参数1,表示放缩的系数,1表示保持原图大小
img1 = cv2.warpAffine(img,matrix,(cols,rows))
cv2.imshow('img',img)
cv2.imshow('img1',img1)
##################### 对图像进行变换(三点得到一个变换矩阵)
# 我们知道三点确定一个平面,我们也可以通过确定三个点的关系来得到转换矩阵
# 然后再通过warpAffine来进行变换
img = cv2.imread('dog.jpg')
rows,cols,_ = img.shape
points1 = np.float32([[50,50],[200,50],[50,200]])
points2 = np.float32([[10,100],[200,50],[100,250]])
matrix = cv2.getAffineTransform(points1,points2)
output = cv2.warpAffine(img,matrix,(cols,rows))
cv2.imshow('input',img)
cv2.imshow('output',output)
##################### 对图像进行变换(四点得到一个变换矩阵)
# 进行透视变换
# 可以先用四个点来确定一个3*3的变换矩阵(cv2.getPerspectiveTransform)
# 然后通过cv2.warpPerspective和上述矩阵对图像进行变换
img = cv2.imread('cat.jpg')
rows,cols,_ = img.shape
points1 = np.float32([[56,65],[368,52],[28,387],[389,390]])
points2 = np.float32([[0,0],[300,0],[0,300],[300,300]])
matrix = cv2.getPerspectiveTransform(points1,points2)
# 将四个点组成的平面转换成另四个点组成的一个平面
output = cv2.warpPerspective(img, matrix, (cols, rows))
# 通过warpPerspective函数来进行变换
cv2.imshow('img',img)
cv2.imshow('output',output)
cv2.waitKey()
cv2.destroyAllWindows()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
评论记录:
回复评论: