
深度学习笔记之优化算法——动量法的简单认识
引言
上一节介绍了随机梯度下降 ( Stochastic Gradient Descent,SGD ) (\text{Stochastic Gradient Descent,SGD}) (Stochastic Gradient Descent,SGD),本节将介绍动量法。
回顾:条件数与随机梯度下降的相应缺陷
早在梯度下降法在强凸函数的收敛性分析中介绍了条件数
(
Condition Number
)
(\text{Condition Number})
(Condition Number)的概念。如果目标函数
f
(
⋅
)
f(\cdot)
f(⋅)在某点处的
Hessian Matrix
⇒
∇
2
f
(
⋅
)
\text{Hessian Matrix} \Rightarrow \nabla^2 f(\cdot)
Hessian Matrix⇒∇2f(⋅)存在并且它具备:
这意味着
Hessian Matrix
\text{Hessian Matrix}
Hessian Matrix必然是正定矩阵。
∇
2
f
(
⋅
)
≽
I
\nabla^2 f(\cdot) \succcurlyeq \mathcal I
∇2f(⋅)≽I
那么它的条件数
C
\mathcal C
C可表示为:
C
=
λ
m
a
x
λ
m
i
n
\mathcal C = \frac{\lambda_{max}}{\lambda_{min}}
C=λminλmax
其中
λ
m
a
x
\lambda_{max}
λmax与
λ
m
i
n
\lambda_{min}
λmin分别表示
∇
2
f
(
⋅
)
\nabla^2 f(\cdot)
∇2f(⋅)特征值的最大、最小值。如果
C
\mathcal C
C过大,会导致:使用梯度下降法处理
f
(
⋅
)
f(\cdot)
f(⋅)的优化问题,当
C
⇒
∞
\mathcal C \Rightarrow \infty
C⇒∞时,那么算法的收敛速度由线性收敛退化至次线性收敛。这种现象也被称作
Hessain Matrix
\text{Hessain Matrix}
Hessain Matrix的病态条件。
上面仅仅是理论上的描述。在真实环境下,会出现什么样的效果
?
?
?以标准二次型
f
(
x
)
=
x
T
Q
x
f(x) = x^T \mathcal Q x
f(x)=xTQx为例,其中
Q
=
(
0.5
0
0
20
)
,
x
=
(
x
1
,
x
2
)
T
\mathcal Q = (0.50020)
由于Q \mathcal Q Q是对角阵,因而它的特征值分别是0.5 , 20 0.5,20 0.5,20因而在f ( x ) f(x) f(x)定义域内的点,其对应Hessian Matrix \text{Hessian Matrix} Hessian Matrix的条件数也是不低的。如果从目标函数的角度观察,它会是一个中间狭窄,两端狭长的船形形状。关于该图代码见文章末尾,下同~
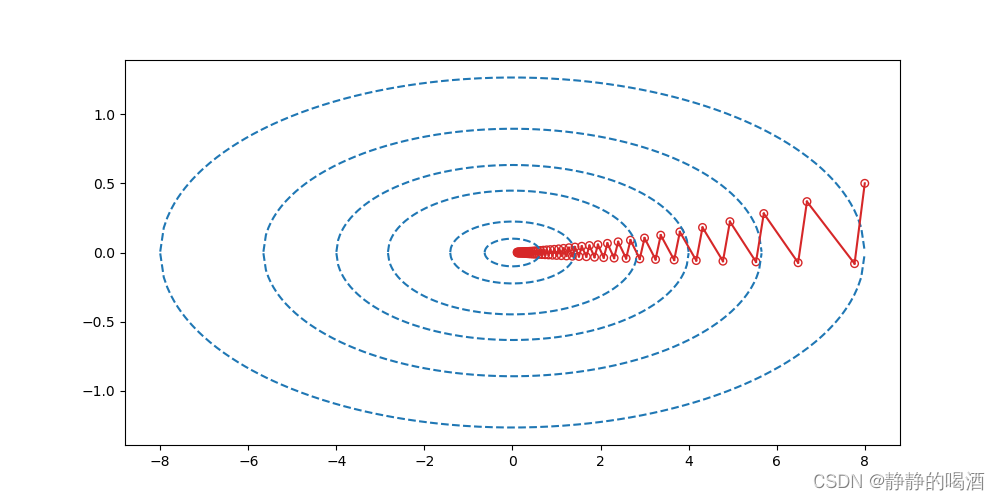
在该示例中,我们并不否认其最终收敛到最优解,但使用迭代步骤的数量是比较夸张的:
- 其中一个原因是梯度下降法不具备二次终止性——即便已经到达最优解附近,但依然不能基于有限迭代步骤内接近最优解;
- 在整个迭代过程中,梯度下降法在 f ( ⋅ ) f(\cdot) f(⋅)的收敛路径过于冗余(线性收敛退化至次线性收敛的效果)——完全可以通过震荡更小的、路径更直接的方式实现收敛过程。
动量法简单认识
关于上述梯度下降法的迭代公式表示如下:
θ
⇐
θ
−
η
⋅
∇
θ
J
(
θ
)
\theta \Leftarrow \theta - \eta \cdot \nabla_{\theta} \mathcal J(\theta)
θ⇐θ−η⋅∇θJ(θ)
其中
η
\eta
η表示学习率。它可以被理解为每一迭代步骤,负梯度方向上调整的步长大小。随着迭代步骤的推移,梯度结果逐渐减小,而学习率是固定值,从而导致收敛速度越来越慢:
- 如果目标函数 f ( ⋅ ) f(\cdot) f(⋅)至少是严格凸函数,那么 f ( ⋅ ) f(\cdot) f(⋅)存在全局解,这种情况充其量是不具备二次终止性——需要花费较长时间收敛到最优解附近;
- 但如果目标函数非常复杂,收敛速度慢可能导致:数值解陷入局部最优或者鞍点。
关于动量法的迭代公式表示如下:
一些文章中也描述为:
{
m
⇐
γ
⋅
m
+
η
⋅
∇
θ
J
(
θ
)
θ
⇐
θ
−
m
{m⇐γ⋅m+η⋅∇θJ(θ)θ⇐θ−m,两者之间等价,因为负梯度方向的描述就是
−
∇
θ
J
(
θ
)
-\nabla_{\theta} \mathcal J(\theta)
−∇θJ(θ)该式首先仅将梯度数值部分进行累积,再执行更新。
{
m
⇐
γ
⋅
m
−
η
⋅
∇
θ
J
(
θ
)
θ
⇐
θ
+
m
{m⇐γ⋅m−η⋅∇θJ(θ)θ⇐θ+m
其中
m
m
m表示动量;并且该变量在每次迭代过程中均被更新——它在每一次迭代过程中都对梯度元素
η
⋅
∇
θ
J
(
θ
)
\eta \cdot \nabla_{\theta} \mathcal J(\theta)
η⋅∇θJ(θ)进行累积;
γ
∈
[
0
,
1
)
\gamma \in [0,1)
γ∈[0,1)表示动量因子,它决定了之前迭代步骤累积得到的动量衰减的程度效果。
而动量法的核心思想是:利用过去累积的梯度元素与当前迭代步骤的梯度元素进行加权运算,使其朝着最优解更快收敛:
- 如果
γ
=
0
\gamma = 0
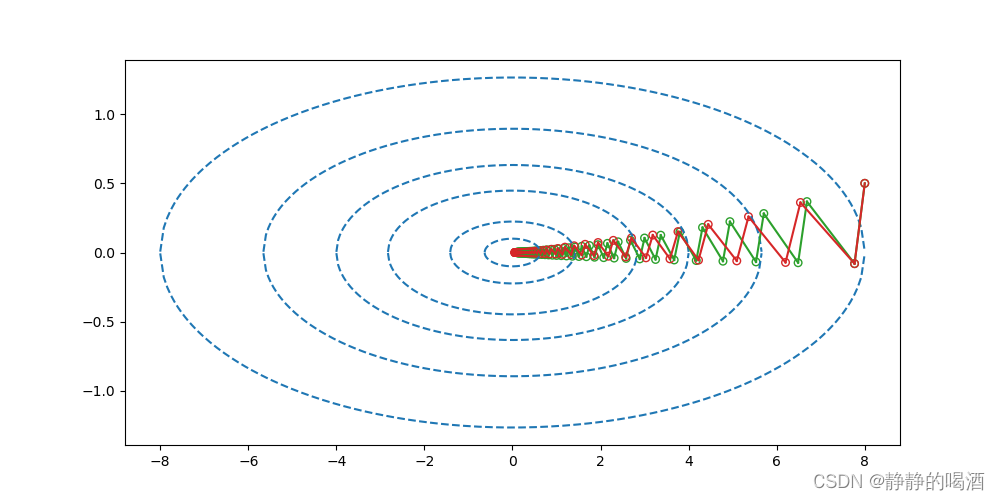
γ=0意味着:在当前迭代步骤中,之前累积的梯度元素没有任何比重。也就是说,每次迭代过程仅与当前迭代步骤的梯度相关,此时的动量法也退化为梯度下降法。这里以
γ
=
0.1
\gamma = 0.1
γ=0.1图像进行示例:
其中绿色图像表示梯度下降法的迭代路径;红色图像则表示γ = 0.1 \gamma=0.1 γ=0.1时动量法的迭代路径。此时两者已经非常接近了,但动量法的迭代步骤明显小于梯度法。
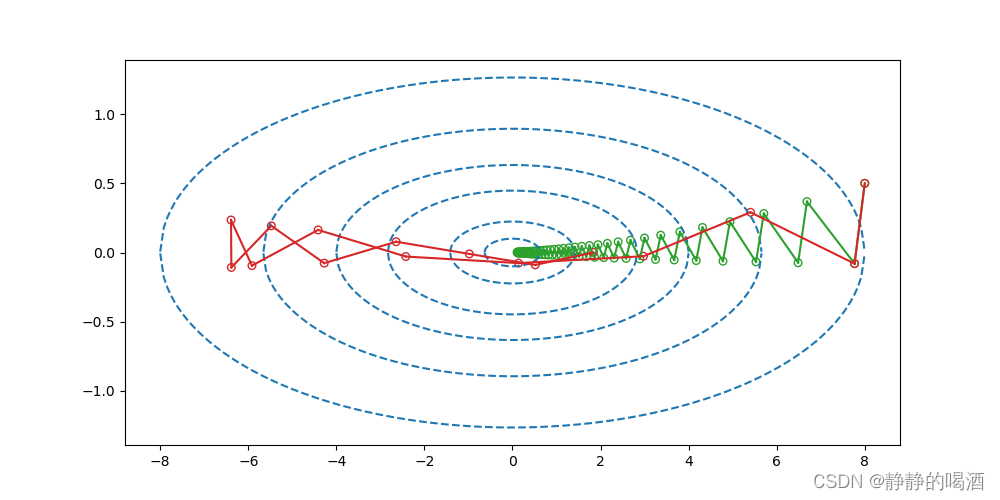
- 如果
γ
⇒
1
\gamma \Rightarrow 1
γ⇒1意味着:当前迭代步骤中的梯度信息几乎不起作用,而过去累积的梯度元素占主导部分。这里以
γ
=
0.9
\gamma=0.9
γ=0.9为例,对应图像结果表示如下:
很明显,通过红色图像可知,当前迭代步骤的梯度元素也是有意义的,不能过于否定当前结果而过于依赖过去信息。
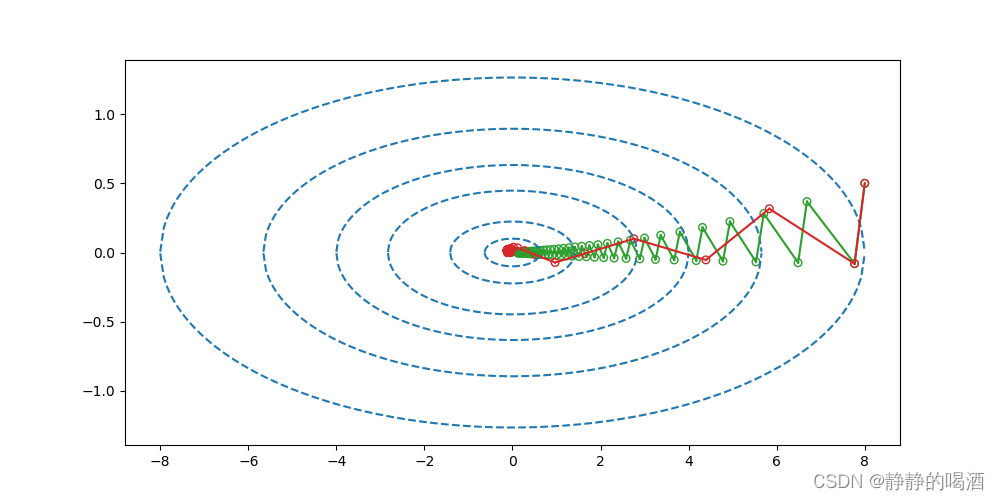
- 因而需要找到合适的
γ
\gamma
γ,使其能够稳定收敛的基础上,减少迭代路径的距离。例如
γ
=
0.6
\gamma=0.6
γ=0.6时的图像结果:
可以明显看出:随着迭代步骤的更新,动量法迭代的幅度(跨越的距离长度)越来越大。即:过去梯度元素牵制着当前步骤的梯度方向。从而会有效减少更新步骤。并且,对于这类病态条件的二次目标函数有着不错的效果。
关于动量法的更新速度,见如下示例:
-
m
t
m_t
mt表示第
t
t
t次迭代步骤的动量;假设每次迭代的梯度结果均相同,为
G
=
∇
θ
J
(
θ
)
\mathcal G = \nabla_{\theta} \mathcal J(\theta)
G=∇θJ(θ),从初始时刻
m
0
=
0
m_0=0
m0=0开始,有如下迭代过程:
常用泰勒公式,需要满足γ ∈ ( − 1 , 1 ) \gamma \in (-1,1) γ∈(−1,1)
m 0 = 0 m 1 = γ ⋅ m 0 + η ⋅ G = η ⋅ G m 2 = γ ⋅ m 1 + η ⋅ G = ( 1 + γ ) η ⋅ G m 3 = γ ⋅ m 2 + η ⋅ G = ( 1 + γ + γ 2 ) η ⋅ G ⋮ m + ∞ = ( 1 + γ + γ 2 + γ 3 + ⋯ ) η ⋅ G = 1 1 − γ η ⋅ G m_0 = 0 \\ m_1 = \gamma \cdot m_0 + \eta \cdot \mathcal G = \eta \cdot \mathcal G \\ m_2 = \gamma \cdot m_1 + \eta \cdot \mathcal G = (1 + \gamma) \eta \cdot \mathcal G \\ m_3 = \gamma \cdot m_2 + \eta \cdot \mathcal G = (1 + \gamma + \gamma^2) \eta \cdot \mathcal G\\ \vdots \\ m_{+\infty} = (1 + \gamma + \gamma^2 + \gamma^3 + \cdots) \eta \cdot \mathcal G = \frac{1}{1 - \gamma} \eta \cdot \mathcal G m0=0m1=γ⋅m0+η⋅G=η⋅Gm2=γ⋅m1+η⋅G=(1+γ)η⋅Gm3=γ⋅m2+η⋅G=(1+γ+γ2)η⋅G⋮m+∞=(1+γ+γ2+γ3+⋯)η⋅G=1−γ1η⋅G - 这意味着:动量在迭代过程中进行累积, γ \gamma γ越大,动量越大,它的迭代幅度越大,更新速度也更快(见上图 2 2 2)。反之,一直快下去也不是优质的选择,我们同样需要当前迭代步骤的 η ⋅ G \eta \cdot \mathcal G η⋅G对动量进行约束。
动量法的算法过程描述
基于动量法的随机梯度下降的算法步骤表示如下:
初始化操作:
- 学习率 η \eta η,动量因子 γ \gamma γ;
- 初始化参数 θ \theta θ,初始动量 m m m;
算法过程:
- While \text{While} While 没有达到停止准则 do \text{do} do
- 从训练集 D \mathcal D D中采集出 包含 k k k个样本的小批量: { ( x ( i ) , y ( i ) ) } i = 1 k \{(x^{(i)},y^{(i)})\}_{i=1}^{k} {(x(i),y(i))}i=1k;
- 计算当前迭代步骤的梯度估计:
其中f ( x ( i ) ; θ ) f(x^{(i)};\theta) f(x(i);θ)表示模型预测结果;L ( ⋅ ) \mathcal L(\cdot) L(⋅)表示损失函数;
G = 1 k ∑ i = 1 k ∇ θ L [ f ( x ( i ) ; θ ) , y ( i ) ] \mathcal G = \frac{1}{k} \sum_{i=1}^k \nabla_{\theta} \mathcal L[f(x^{(i)};\theta),y^{(i)}] G=k1i=1∑k∇θL[f(x(i);θ),y(i)] - 计算动量更新:
m ⇐ γ ⋅ m − η ⋅ G m \Leftarrow \gamma \cdot m - \eta \cdot \mathcal G m⇐γ⋅m−η⋅G - 计算参数
θ
\theta
θ更新:
θ ⇐ θ + m \theta \Leftarrow \theta + m θ⇐θ+m - End While \text{End While} End While
附:动量法示例代码
注:代码中没有使用确定的学习率作为步长,是对最速下降法代码的一个修改,使用查找的方式找到一个优质步长实现迭代过程。
import numpy as np
import math
import matplotlib.pyplot as plt
def f(x, y):
return 0.5 * (x ** 2) + 20 * (y ** 2)
def ConTourFunction(x, Contour):
return math.sqrt(0.05 * (Contour - (0.5 * (x ** 2))))
def Derfx(x):
return x
def Derfy(y):
return 40 * y
def DrawBackGround():
ContourList = [0.2, 1.0, 4.0, 8.0, 16.0, 32.0]
LimitParameter = 0.0001
plt.figure(figsize=(10, 5))
for Contour in ContourList:
# 设置范围时,需要满足x的定义域描述。
x = np.linspace(-1 * math.sqrt(2 * Contour) + LimitParameter, math.sqrt(2 * Contour) - LimitParameter, 200)
y1 = [ConTourFunction(i, Contour) for i in x]
y2 = [-1 * j for j in y1]
plt.plot(x, y1, '--', c="tab:blue")
plt.plot(x, y2, '--', c="tab:blue")
def GradientDescent(stepTime=80,epsilon=5.0,mode="momentum"):
assert mode in ["SGD","momentum"]
Start = (8.0, 0.5)
StartV = (0.0, 0.0)
alpha = 0.6
LocList = list()
LocList.append(Start)
for _ in range(stepTime):
DerStart = (Derfx(Start[0]), Derfy(Start[1]))
for _,step in enumerate(list(np.linspace(0.0, 1.0, 1000))):
if mode == "momentum":
NextV = (alpha * StartV[0] - step * DerStart[0], alpha * StartV[1] - step * DerStart[1])
Next = (Start[0] + NextV[0],Start[1] + NextV[1])
DerfNext = Derfx(Next[0]) * (-1 * DerStart[0]) + Derfy(Next[1]) * (-1 * DerStart[1])
if abs(DerfNext) <= epsilon:
LocList.append(Next)
StartV = NextV
Start = Next
epsilon /= 1.1
break
else:
Next = (Start[0] - (DerStart[0] * step), Start[1] - (DerStart[1] * step))
DerfNext = Derfx(Next[0]) * (-1 * DerStart[0]) + Derfy(Next[1]) * (-1 * DerStart[1])
if abs(DerfNext) <= epsilon:
LocList.append(Next)
Start = Next
epsilon /= 1.1
break
plotList = list()
if mode == "momentum":
c = "tab:red"
else:
c = "tab:green"
for (x, y) in LocList:
plotList.append((x, y))
plt.scatter(x, y, s=30, facecolor="none", edgecolors=c, marker='o')
if len(plotList) < 2:
continue
else:
plt.plot([plotList[0][0], plotList[1][0]], [plotList[0][1], plotList[1][1]], c=c)
plotList.pop(0)
if __name__ == '__main__':
DrawBackGround()
GradientDescent(mode="SGD")
GradientDescent(mode="momentum")
plt.show()

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
Reference
\text{Reference}
Reference:
谈谈优化算法之一(动量法、Nesterov法、自然梯度法)
深度学习(一)优化算法之动量法详解
评论记录:
回复评论: