
1. 唠叨两句
当我们要用相机做测量用途时,就需要做相机标定了,不然得到的计算结果会有很大误差,标定的内容包括三部分:内参,外参还有畸变参数。所以标定的过程就是要求得上面这些参数。
以前弄这个事估计挺麻烦,需要做实验和计算才能得到,现在通过ros的开源包几分钟就能完成相机标定,感激!
具体的内外参和畸变系数的说明,可以看看Reference里面的第一个链接,写得很详细。
2. 准备工作
要准备三样东西:
- usb_cam的ROS启动包
- 相机标定的ROS包
- 还有一个用于标定的棋盘格
1)usb_cam启动包
使用我上传的usb_cam版本,不知道为什么用GitHub下载的版本不行,这个usb_cam版本也是别人发的,很奇怪,之后有时间可以研究一下,看看有什么不同,它们两个包都可以打开摄像头,就是用GitHub的版本打开后,apriltag_ros不输出正确的数值。下载点这里
下载解压后,放到对应的work space中src文件里面,例如catkin_ws
然后用catkin_make编译
然后用ls /dev/video*看看usb摄像头的编号,如果
will@will-Dell-G15-5511:~/omni_ws$ ls /dev/video*
/dev/video0 /dev/video1 /dev/video2 /dev/video3
- 1
- 2
我的笔记本上有webcam又连了一个外接的摄像头,实际是两个摄像头有四个编号,其实只用0和2就行,分别对应webcam和usb cam,其他两个用不了,然后修改 usb_cam/launch/usb_cam-test.launch
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
主要就是修改里面的 这一项就行,默认是0,改成/dev/video2就行
然后启动roslaunch usb_cam usb_cam-test.launch
有图像出来就成功了。
2)ROS的相机标定包
很方便,直接apt-get就能下载使用:
sudo apt-get install ros-melodic-camera-calibration
3)打印棋盘格
可以到Google或Baidu上搜一个,像下面这样的
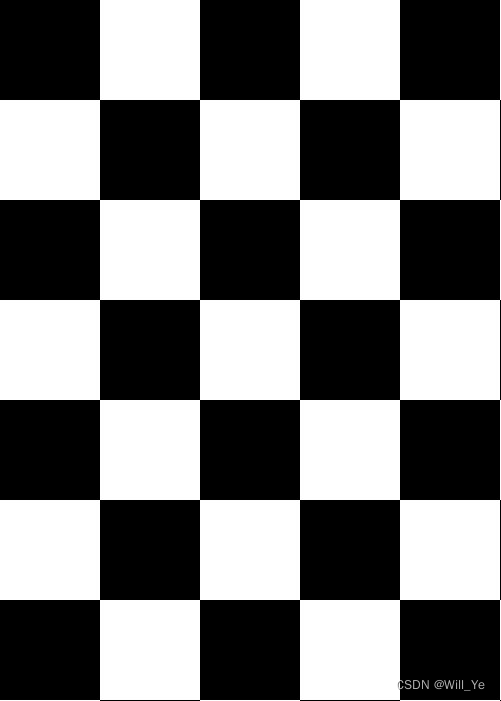
然后弄清楚两个事情就行:
第一个,就是这个棋盘格的size,比如上图这个是一个4x6的,就数四个格子的交点一行有几个,和一列有几个就行
第二个,确定格子的大小,要根据打印出来的结果进行测量,上面这张图,我用A4纸打印,打印出来的格子边长是0.026m,也就是2.6cm,还要量一下格子的长宽,看看是不是真的是正方形。
确定上面这两点很重要,后面的输入会用到
3. 开始标定
先启动相机,再启动标定程序
roslaunch usb_cam usb_cam-test.launch
rosrun camera_calibration cameracalibrator.py --size 4x6 --square 0.026 image:=/usb_cam/image_raw camera:=/usb_cam
上面第二条指令就是启动标定程序的,里面需要输入棋盘的size和square对应的就是上面提到的两个数值
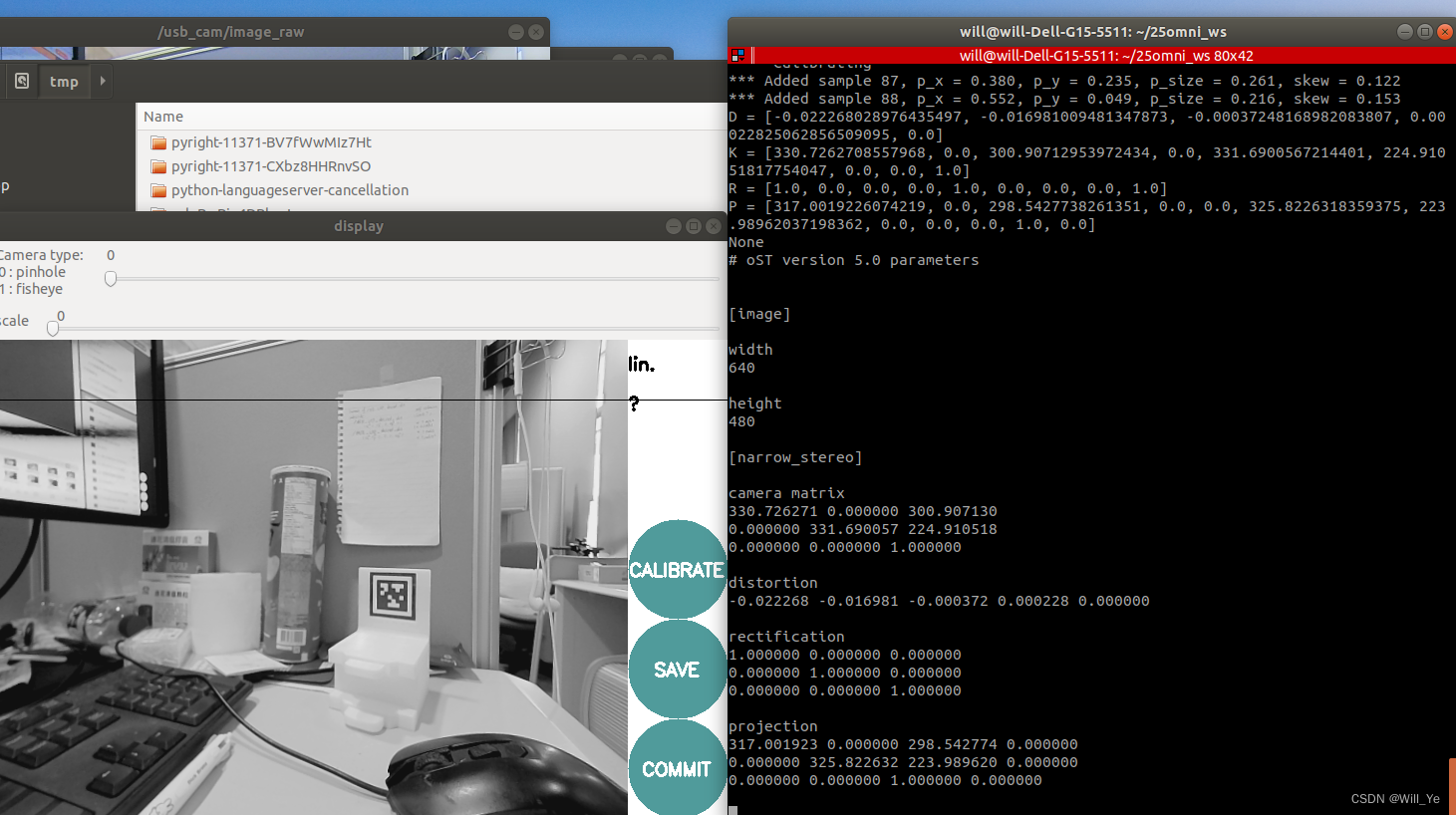
然后就会看到如下的界面:
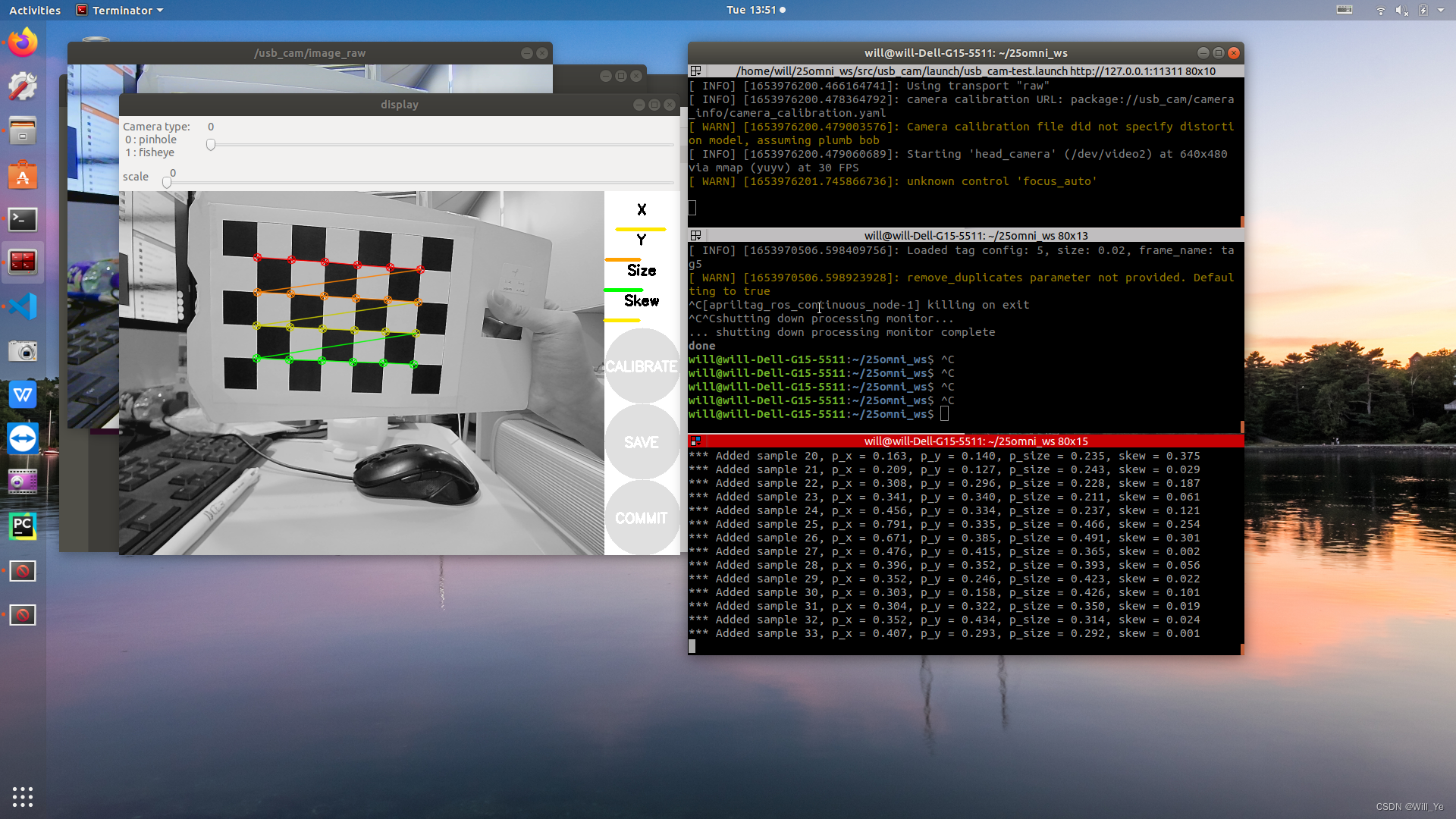 在标定程序的界面能看到右侧有X Y Size Skew 还有CALIBRATE, SAVE 和COMMIT的标识
在标定程序的界面能看到右侧有X Y Size Skew 还有CALIBRATE, SAVE 和COMMIT的标识
X:表示标定板在视野中的左右位置
Y:表示标定板在视野中的上下位置
Size:表示标定板在视野中的尺寸大小,其实就是离相机的远近
Skew:表示标定板在视野中的倾斜角度
打开程序后,就可以开始调整标定板的位置,让它在相机视野中各个位置移动和转动,让X Y Size和Skew这四个值下面的长条变成绿色,然后就可以看到CALIBRATE这个按钮变成青色,点击就会开始计算相机的参数,这个过程需要等一会,耐心等待
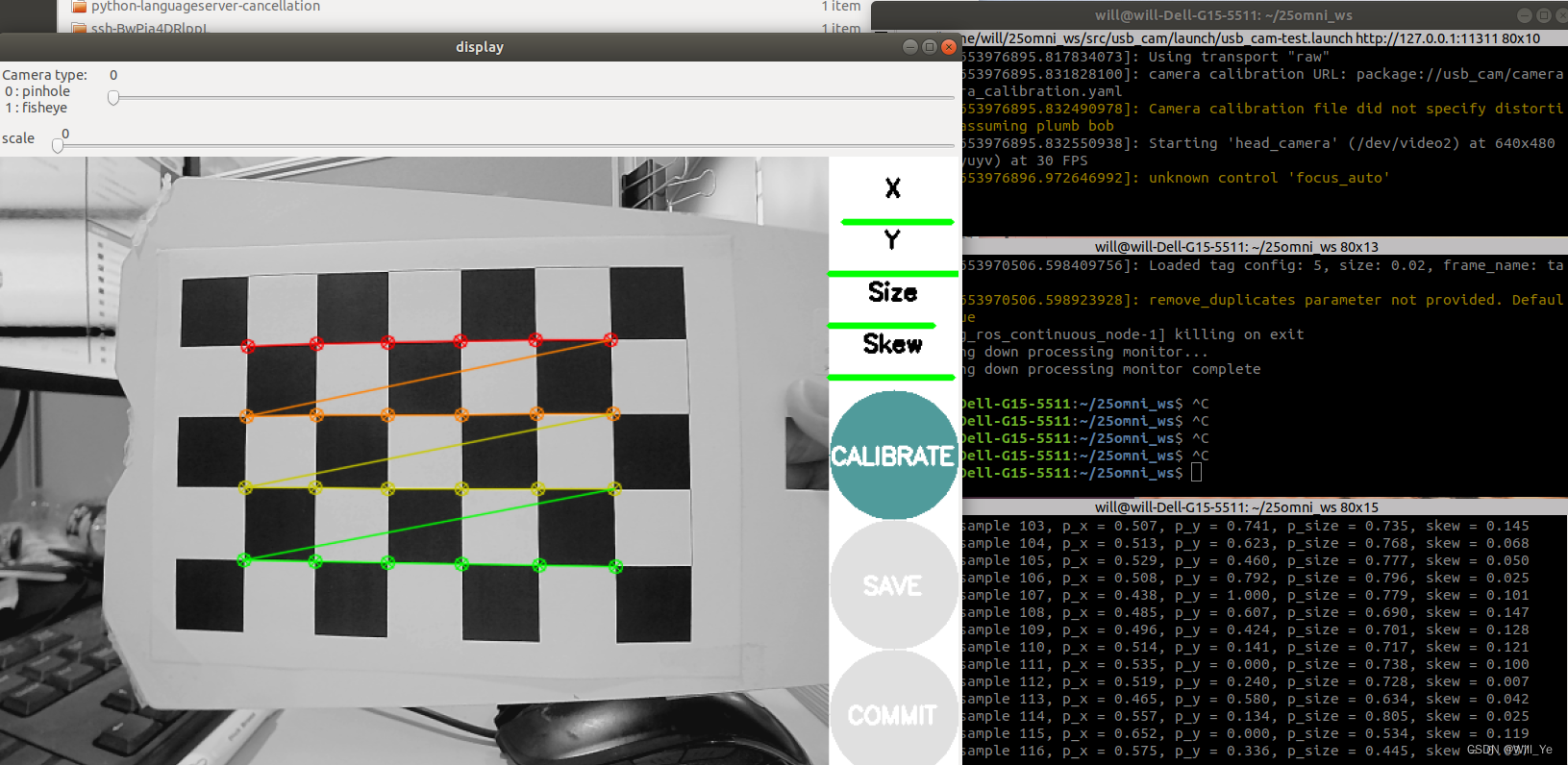
当计算完毕,就可以在terminal中看到如下数据
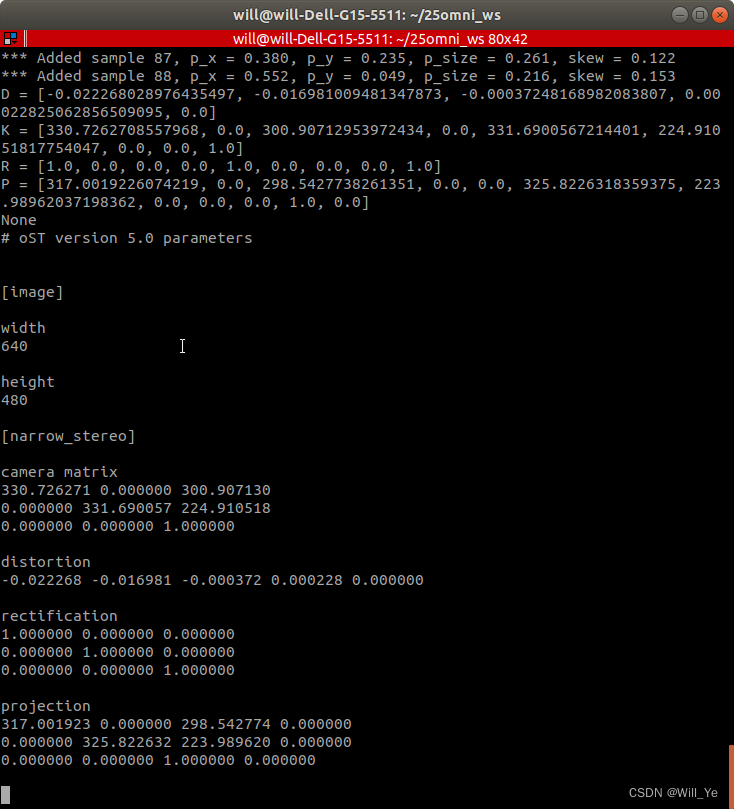
然后SAVE按钮也会变成青色,点击SAVE按钮就会把数据保存到默认的目录下.
这个目录在/tmp/calibrationdata.tar.gz
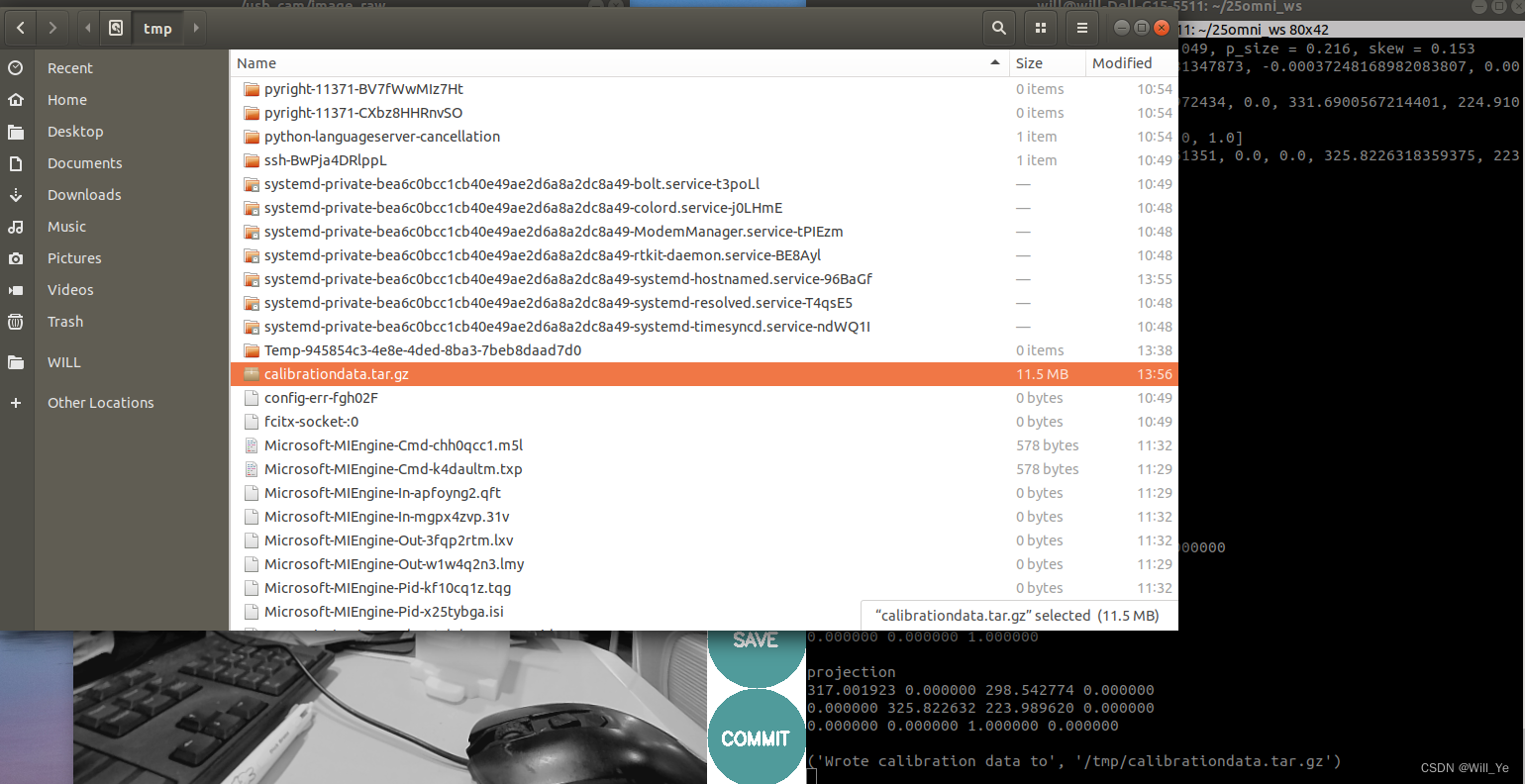
打开这个压缩包,里面有刚刚采集的图片,还有保存相机的参数,如下:
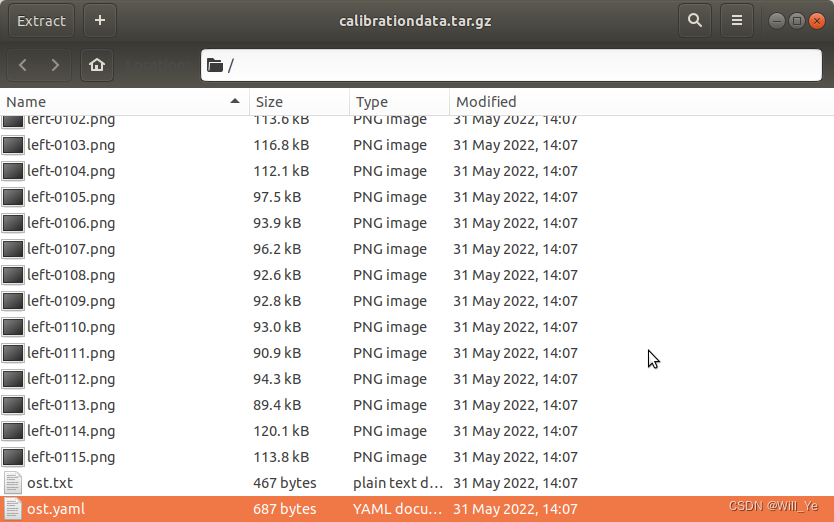
把里面的这个ost.yaml解压放到usb_cam的src目录下,然后改下名字,比如camera_calibration20220531.yaml,我喜欢把这些配置文件放到一个文件夹里,然后记下路径
然后就是最后一步了,打开launch文件,加多一行导入相机参数:
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
之后照常用roslaunch启动usb cam就可以了,然后可以对比一下标定前后的测量结果,会发现精度有了很大提升。
Reference
- Step1:模型 16个相机参数(内参、外参、畸变参数):
https://blog.csdn.net/weixin_43206570/article/details/84797361
评论记录:
回复评论: