
功能 简介
- 实现了局域的出/入 分别计数。
- 显示检测类别,ID数量。
- 默认是 南/北 方向检测,若要检测不同位置和方向,需要加以修改
- 可在 count_car/traffic.py 点击运行
- 默认检测类别:行人、自行车、小汽车、摩托车、公交车、卡车、船。
- 检测类别可在 objdetector.py 文件修改。
代码运行
$ git clone 追踪代码
- 1
因此repo包含weights及mp4等文件,若 git clone 速度慢,可直接下载zip
进入目录
$ cd unbox_yolov5_deepsort_counting
- 1
创建 python 虚拟环境
$ python3 -m venv venv
- 1
激活虚拟环境
$ source venv/bin/activate
- 1

升级pip
$ python -m pip install --upgrade pip
- 1
安装pytorch
根据你的操作系统、安装工具以及CUDA版本,在 https://pytorch.org/get-started/locally/ 找到对应的安装命令。我的环境是 ubuntu 18.04.5、pip、CUDA 11.0。
安装软件包
$ pip install -r requirements.txt
- 1
在 demo.py 文件中,设置要检测的视频文件路径,默认为 './video/test.mp4'
capture = cv2.VideoCapture(‘./video/test.mp4’)
运行程序
python count.py
- 1
demo代码
detector = Detector()
# 打开视频
capture = cv2.VideoCapture(VIDEO_PATH)
while True:
# 读取每帧图片
_, im = capture.read()
if im is None:
break
# 缩小尺寸
im = cv2.resize(im, (width//2, height//2))
list_bboxs = []
# 更新跟踪器
output_image_frame, list_bboxs = objtracker.update(detector, im)
# 输出图片
output_image_frame = cv2.add(output_image_frame, color_polygons_image)
if len(list_bboxs) > 0:
# ----------------------判断撞线----------------------
for item_bbox in list_bboxs:
x1, y1, x2, y2, _, track_id = item_bbox
# 撞线检测点,(x1,y1),y方向偏移比例 0.0~1.0
y1_offset = int(y1 + ((y2 - y1) * 0.6))
# 撞线的点
y = y1_offset
x = x1
if polygon_mask_blue_and_yellow[y, x] == 1:
# 如果撞 蓝polygon
if track_id not in list_overlapping_blue_polygon:
list_overlapping_blue_polygon.append(track_id)
# 判断 黄polygon list里是否有此 track_id
# 有此track_id,则认为是 UP (上行)方向
if track_id in list_overlapping_yellow_polygon:
# 上行+1
up_count += 1
print('up count:', up_count, ', up id:', list_overlapping_yellow_polygon)
# 删除 黄polygon list 中的此id
list_overlapping_yellow_polygon.remove(track_id)
elif polygon_mask_blue_and_yellow[y, x] == 2:
# 如果撞 黄polygon
if track_id not in list_overlapping_yellow_polygon:
list_overlapping_yellow_polygon.append(track_id)
# 判断 蓝polygon list 里是否有此 track_id
# 有此 track_id,则 认为是 DOWN(下行)方向
if track_id in list_overlapping_blue_polygon:
# 下行+1
down_count += 1
print('down count:', down_count, ', down id:', list_overlapping_blue_polygon)
# 删除 蓝polygon list 中的此id
list_overlapping_blue_polygon.remove(track_id)
# ----------------------清除无用id----------------------
list_overlapping_all = list_overlapping_yellow_polygon + list_overlapping_blue_polygon
for id1 in list_overlapping_all:
is_found = False
for _, _, _, _, _, bbox_id in list_bboxs:
if bbox_id == id1:
is_found = True
if not is_found:
# 如果没找到,删除id
if id1 in list_overlapping_yellow_polygon:
list_overlapping_yellow_polygon.remove(id1)
if id1 in list_overlapping_blue_polygon:
list_overlapping_blue_polygon.remove(id1)
list_overlapping_all.clear()
# 清空list
list_bboxs.clear()
else:
# 如果图像中没有任何的bbox,则清空list
list_overlapping_blue_polygon.clear()
list_overlapping_yellow_polygon.clear()
# 输出计数信息
text_draw = 'DOWN: ' + str(down_count) + \
' , UP: ' + str(up_count)
output_image_frame = cv2.putText(img=output_image_frame, text=text_draw,
org=draw_text_postion,
fontFace=font_draw_number,
fontScale=0.75, color=(0, 0, 255), thickness=2)
cv2.imshow('Counting Demo', output_image_frame)
cv2.waitKey(1)
capture.release()
cv2.destroyAllWindows()

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
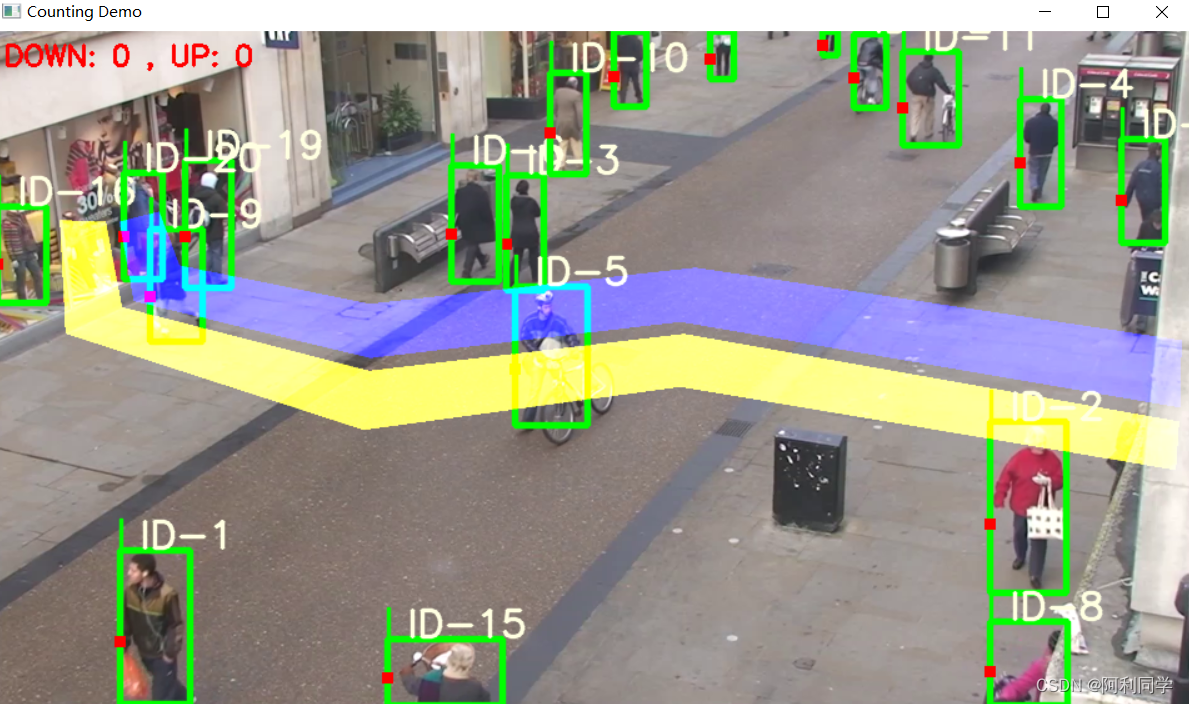
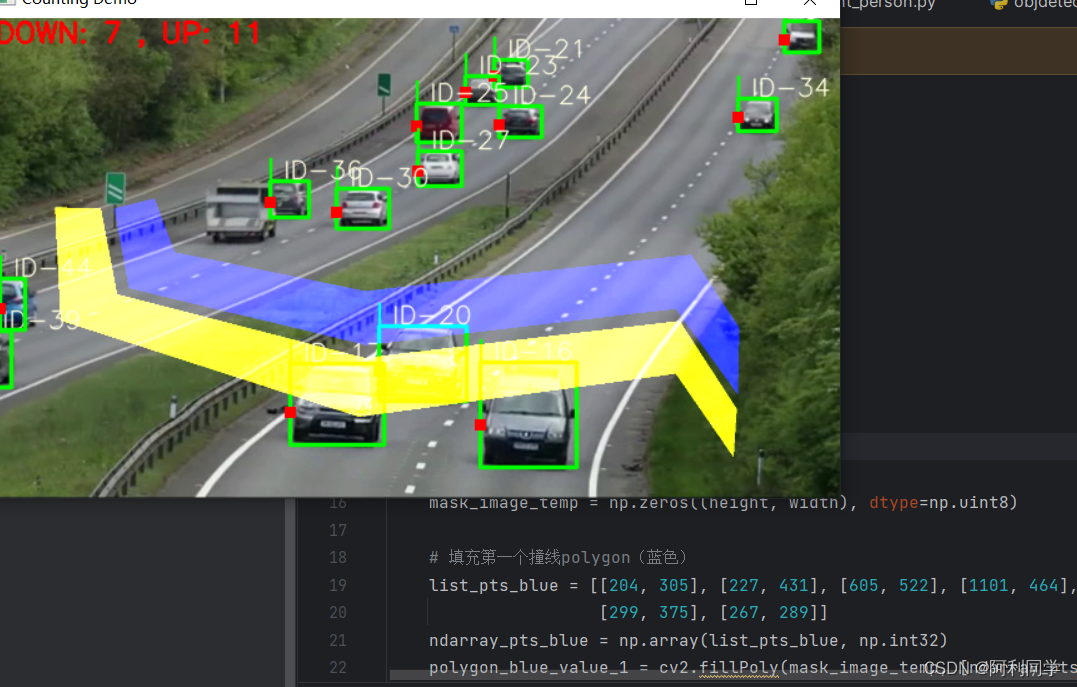
结果展示
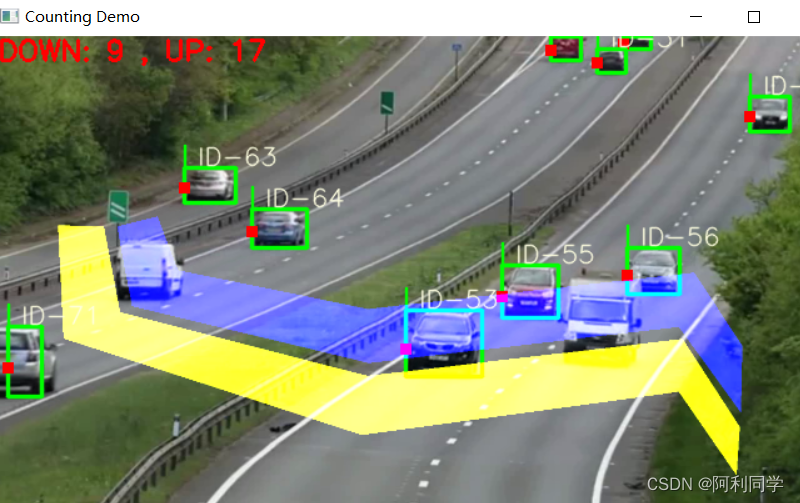
各种追踪 测距 姿态估计 目标检测 计数 测速功能已实现,欢迎交流!
更多项目详见主页!

代码获取/论文辅导/作业帮助
 QQ名片
QQ名片
QQ名片

评论记录:
回复评论: