
更多视觉额自动驾驶项目请见:
小白学视觉
自动驾驶项目
计算机视觉项目大集合-附代码
本文主要工作:
-
科技的发展与进步促使自动驾驶车辆逐渐成为全球汽车产业发展的重要战略 方向。但自动驾驶车辆面对如:大雨、大雾、大雪等极端环境时,智能汽车图像采集与处理系统将面临巨大挑战。
-
并且自动驾驶需要实时关注周围物体的威胁, 实时进行目标检测以及精确测量周围目标的距离是提高汽车安全性的可行之策。
-
**本文首先训练出一种天气分类模型,实时识别当下天气情况。
-
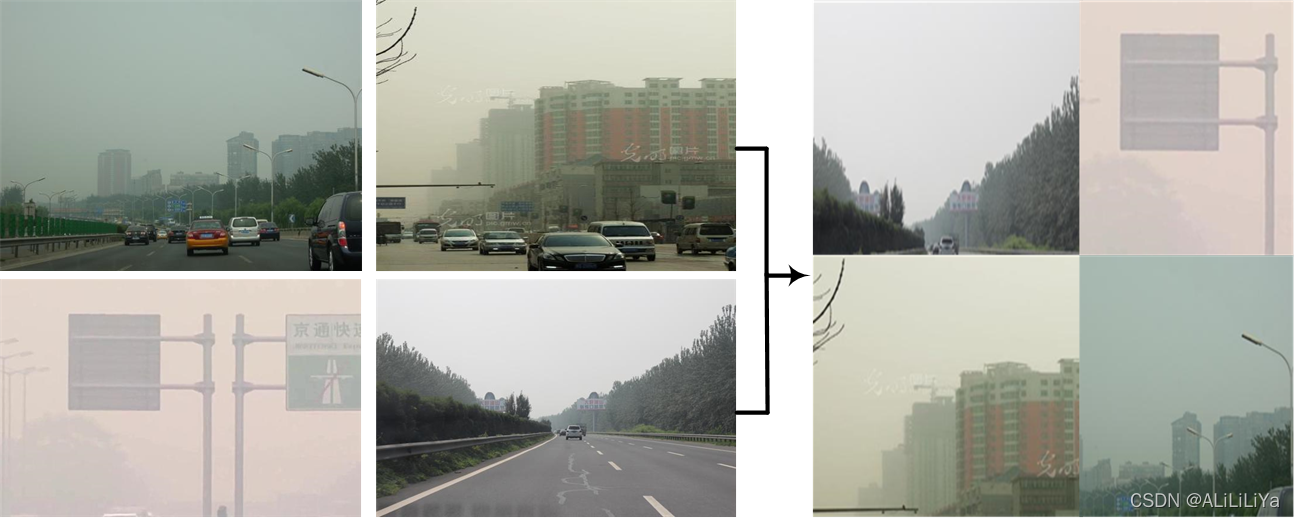
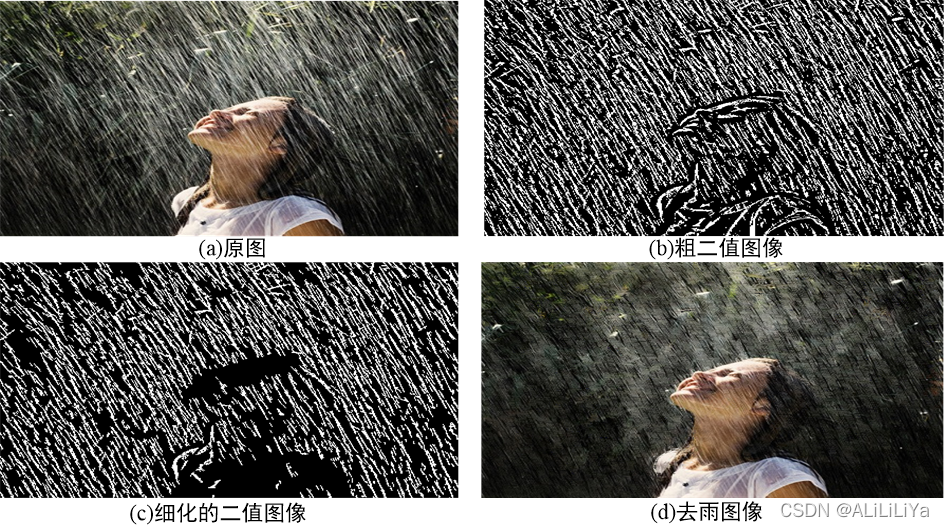
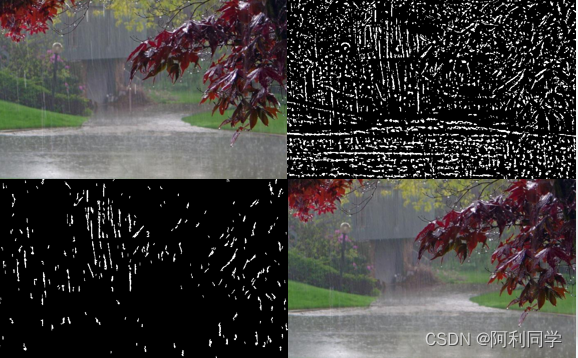
其次针对不同天气 情况则采取不同的图像去噪方法来提高图像质量。
-
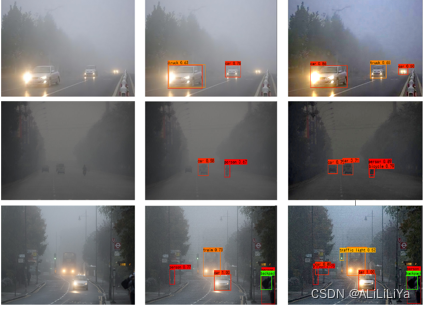
天气前处理完成后将采取改进 的 Yolo 模型对前方行人、车辆等道路环境目标进行目标检测。
-
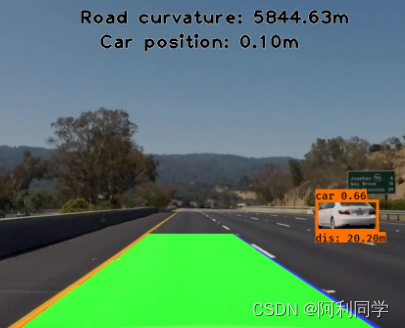
最后对目标检测定 位到的物体采用改进目标点的测距方法进行距离测量,为自动驾驶主动安全行为 提供支持。**
-
总结:本文完成了去雾、去雨、去雪,目标检测与车辆距离测量。运用了yoloV3目标检测,单目测距,prescan仿真。本文代码分享与论文撰写相关的同学可以一起交流。如果对你有用,欢迎私聊点赞交流–
接下来进入正文,准备发车----------->
1.天气分类
为了实时识别出当下的天气情况,利用卷积神经网络搭建了天气分类模型。 针对搜集到的天气图像数量少且不具代表性的问题,通过改进 mosaic 和图像合成 手段进行数据增强与扩充。为了提升模型精度,将数据集划分成 6 种大小不同的 批尺寸,改进激活函数并引入模型优化方案。最终将数据集输送到天气分类模型 训练后得到了良好的权重系数。该模型可以对实时出现的晴天、雨天、雾天、雪 天四种天气进行识别分类,分类精确度可达 93.46%。
mosic天空区域图像增强:
数据增强主要代码部分:
def readxml(image_file):
if image_file.split(".")[1] == 'png':
xml_path = os.path.join(path_origin_xml, image_file.replace('png', 'xml'))
else:
xml_path = os.path.join(path_origin_xml, image_file.replace('jpg', 'xml'))
root = ET.parse(xml_path).getroot()
bb = []
for obj in root.iter('object'): # 获取object节点中的name子节点
bbox = obj.find('bndbox')
xmin = int(float(bbox.find('xmin').text.strip()))
ymin = int(float(bbox.find('ymin').text.strip()))
xmax = int(float(bbox.find('xmax').text.strip()))
ymax = int(float(bbox.find('ymax').text.strip()))
####-----------------非常重要----------------######## 下面的1需要修改 具体修改见链接
bb.append(np.array([xmin, ymin, xmax, ymax, 1]))
return np.array(bb)
if __name__ == "__main__":
lines = []
for filename in os.listdir(os.path.join(image_path, '')):
if filename.endswith(".jpg") or filename.endswith(".JPG") or filename.endswith(".png"):
lines.append(filename)
print(lines)
list1 = list(range(0,len(lines)))
print("list1:",list1)
class="hljs-button signin active" data-title="登录复制" data-report-click="{"spm":"1001.2101.3001.4334"}">




 class="blog_extension_card_cont">
class="blog_extension_card_cont">


评论记录:
回复评论: