
1. 放宽静稳定性(RSS, Relax Static Stability )
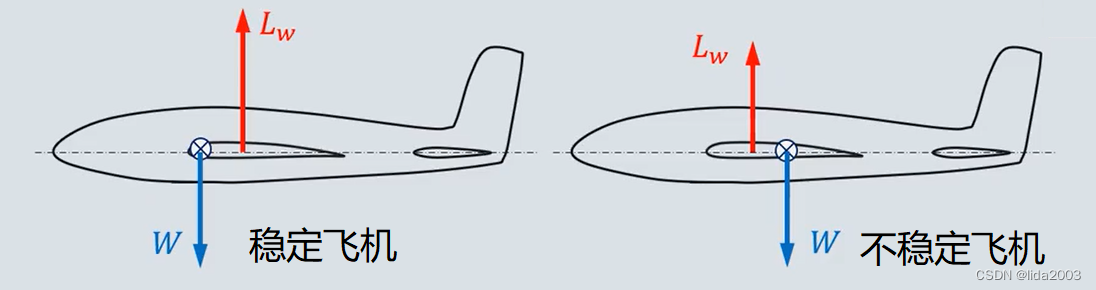 - 稳定飞机:为保证稳定,需要一个抬头力矩,平尾受到向下的力。
- 稳定飞机:为保证稳定,需要一个抬头力矩,平尾受到向下的力。
- 不稳定飞机:为保证稳定,需要一个低头力矩,平尾受到向上的力。
从静稳定的角度来说:不稳定飞机的升力小于重力;稳定飞机的升力大于重力。
而升力增加,意味着阻力增加,随着结构强度(与重量)需要增加;操纵角度来说,可操纵性降低,从而导致性能降低。
相对来说,不稳定飞机的操纵性比稳定飞机的操纵性强;在其他外界因素一致的情况下,稳定飞机,重心越靠近中心点,操纵性越强。
采用放宽静稳定性的手段,可以大幅提高飞机的性能。
- 首先,使飞机的平尾用于平衡所需的面积可以大大减小,因此平尾的重量可以减轻,阻力可以减小;
- 对于静不稳定的飞机,尾翼的升力和翼身组合体升力方向一致,这样飞机的总升力也得到了提高。
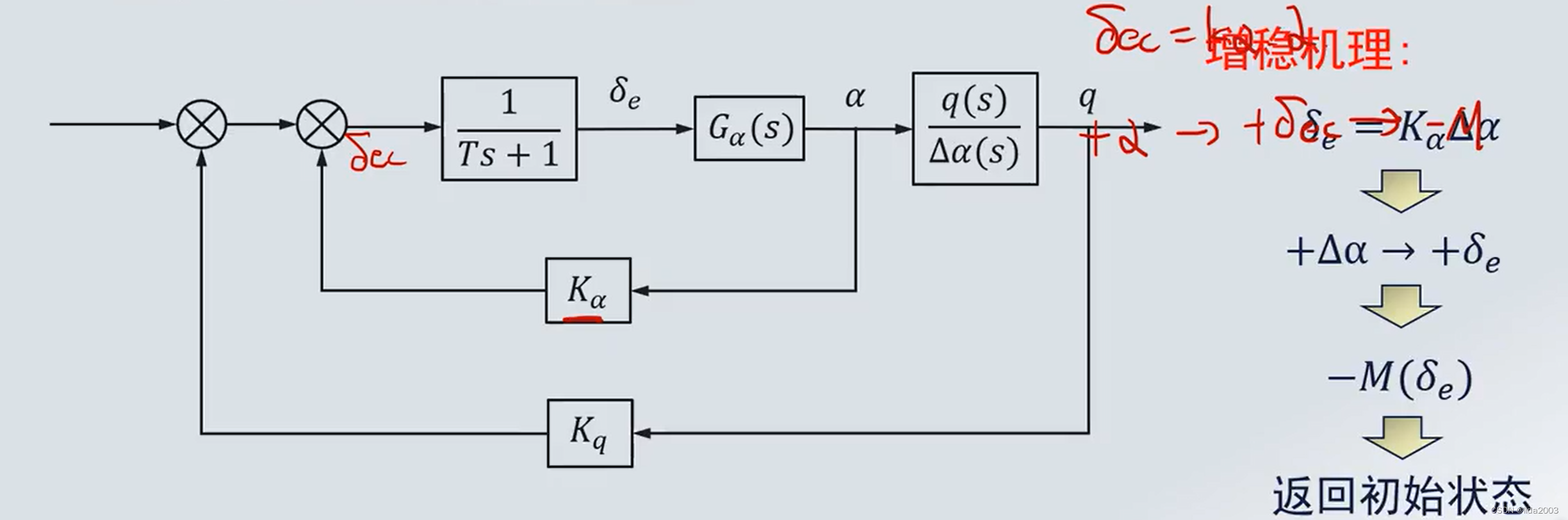
2. 纵向增稳器
对于静不稳定的飞机,放宽静稳定性,能增加机动性,同时减小阻力;但需要通过纵向增稳器引入反馈来调整稳定性。
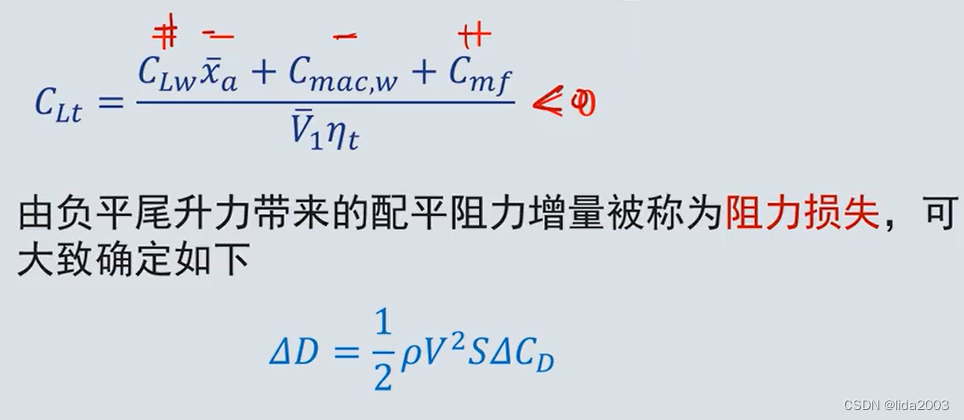
3. 阻力损失
4. 参考资料
飞行动力学-第16节-part2-放宽静稳定性
评论记录:
回复评论: