
一、基于转动惯量和偏心度的描述符介绍
在这篇文章中,我们将学习如何使用pcl:: momenttofinertiaestimate类来获得基于转动惯量和偏心度的描述符。这个类还允许提取点云的轴对齐和定向的边界框(不一定是最小边框)。
【理论基础】:
特征提取方法的思想如下:
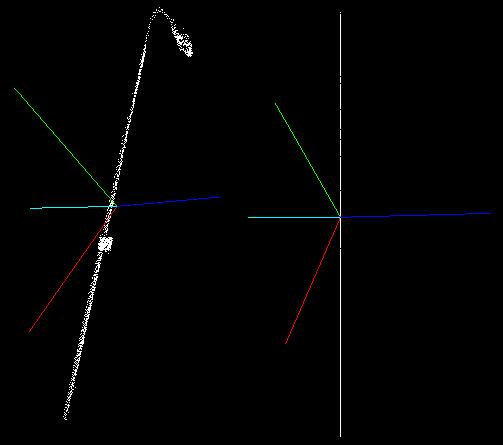
首先计算点云的协方差矩阵,提取点云的特征值和向量(可以理解特征向量就是整篇点云的主轴方向,特征值是在特征向量上的伸缩量)。可以认为合成的特征向量是标准化的,总是形成右手坐标系(主特征向量代表x轴,次特征向量代表z轴)。
然后进行迭代过程。在每次迭代中,主特征向量被旋转。旋转顺序总是相同的,并围绕其他特征向量执行,这提供了点云旋转的不变性。今后,我们将把这个旋转后的主矢量称为当前轴。
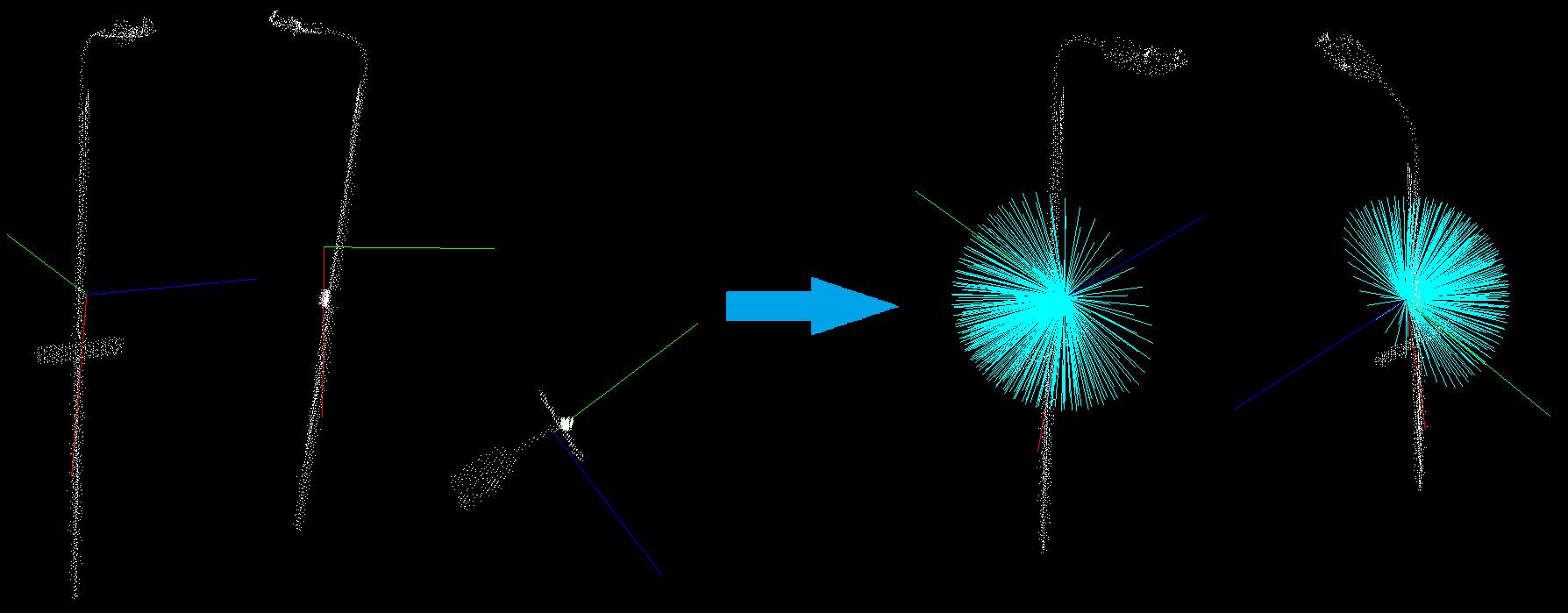
计算每次当前轴的转动惯量并利用当前轴进行偏心距计算。由于这个原因,当前轴矢量方向被视为平面的法向量,输入的点云可以投影到它上面。然后计算得到的投影的离心率。
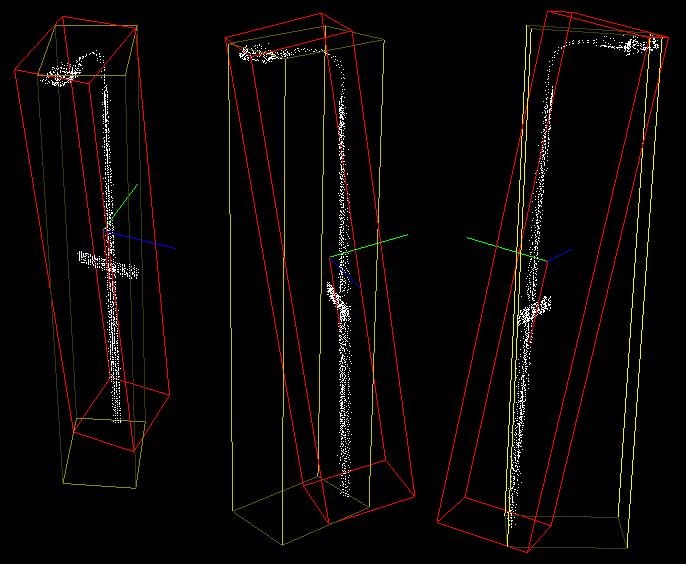
PCL的momenttofinertiaestimate类还提供了获取AABB和OBB包围盒的方法。定向包围盒计算为沿着特征向量的AABB。
AABB:Axis-Aligned Bounding Box,轴对齐包围盒;
OBB:Oriented Bounding Box,有向包围盒;
OBB比包围球和AABB更加逼近物体,能显著减少包围体的个数
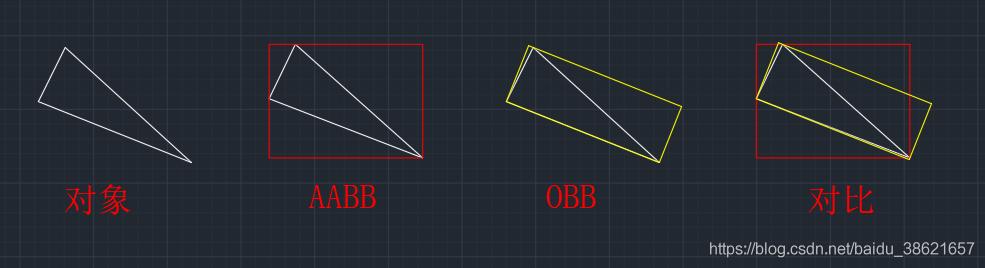
如下图所示黄色为AABB,红色为OBB。
二、基于转动惯量和偏心度的描述符示例程序分析
开始之前,需要在github上下载示例的点云文件,点击这里可以下载。接下来在VS编辑器中创建一个文件moment_of_inertia.cpp,并在其中复制以下代码。
#include 
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
【代码分析】:
现在让我们研究一下这段代码的目的是什么。前几行将被省略,因为它们很容易理解。
以下语句声明所有需要存储的描述符和边界框的相关变量。
std::vector <float> moment_of_inertia; // 转动惯量
std::vector <float> eccentricity; // 离心率
pcl::PointXYZ min_point_AABB; //AABB盒子最小点位置
pcl::PointXYZ max_point_AABB; //AABB盒子最大点未位置
pcl::PointXYZ min_point_OBB; //OBB盒子最小点未位置
pcl::PointXYZ max_point_OBB; //OBB盒子最大点未位置
pcl::PointXYZ position_OBB; //OBB盒子中心位置
Eigen::Matrix3f rotational_matrix_OBB; //OBB盒子旋转矩阵
float major_value, middle_value, minor_value;
Eigen::Vector3f major_vector, middle_vector, minor_vector;
Eigen::Vector3f mass_center; //块中心
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
以下语句说明了如何获取描述符的计算结果
feature_extractor.getMomentOfInertia (moment_of_inertia);
feature_extractor.getEccentricity (eccentricity);
feature_extractor.getAABB (min_point_AABB, max_point_AABB);
feature_extractor.getOBB (min_point_OBB, max_point_OBB, position_OBB, rotational_matrix_OBB);
feature_extractor.getEigenValues (major_value, middle_value, minor_value);
feature_extractor.getEigenVectors (major_vector, middle_vector, minor_vector);
feature_extractor.getMassCenter (mass_center);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
以下语句使用PCLVisualizer类将结果进行了可视化,使用线框显示立方体(默认使用实体立方体,这里用线框显示更清晰)。
OBB的可视化稍微复杂一点。首先从旋转矩阵创建一个四元数,设置obb的位置,并将其传递给可视化器。
pcl::PointXYZ center (mass_center (0), mass_center (1), mass_center (2));
pcl::PointXYZ x_axis (major_vector (0) + mass_center (0), major_vector (1) + mass_center (1), major_vector (2) + mass_center (2));
pcl::PointXYZ y_axis (middle_vector (0) + mass_center (0), middle_vector (1) + mass_center (1), middle_vector (2) + mass_center (2));
pcl::PointXYZ z_axis (minor_vector (0) + mass_center (0), minor_vector (1) + mass_center (1), minor_vector (2) + mass_center (2));
viewer->addLine (center, x_axis, 1.0f, 0.0f, 0.0f, "major eigen vector");
viewer->addLine (center, y_axis, 0.0f, 1.0f, 0.0f, "middle eigen vector");
viewer->addLine (center, z_axis, 0.0f, 0.0f, 1.0f, "minor eigen vector");
- 1
- 2
- 3
- 4
- 5
- 6
- 7
总结:
这篇文章主要介绍了基于转动惯量和偏心量的描述符,并分析了示例程序以学习如何使用该类,我们所要掌握的内容是,当需要对点云画出边界盒时,可以采用这种方式。下篇文章将会介绍RoPs旋转投影特征。
【博主简介】
斯坦福的兔子,男,天津大学机械工程工学硕士。毕业至今从事光学三维成像及点云处理相关工作。因工作中使用的三维处理库为公司内部库,不具有普遍适用性,遂自学开源PCL库及其相关数学知识以备使用。谨此将自学过程与君共享。
博主才疏学浅,尚不具有指导能力,如有问题还请各位在评论处留言供大家共同讨论。
若前辈们有工作机会介绍欢迎私信。
博主介绍:黄菊华老师《Vue.js入门与商城开发实战》《微信小程序商城开发》图书作者,CSDN博客专家,在线教育专家,CSDN钻石讲师;专注大学生毕业设计教育、辅导。
所有项目都配有从入门到精通的基础知识视频课程,学习后应对毕业设计答辩,提供核心代码讲解,答辩指导。
项目配有对应开发文档、开题报告、任务书、PPT等,提供毕业设计论文辅导。项目都录了发布和功能操作演示视频;项目的界面和功能都可以定制,包安装运行!!!
如果需要联系我,可以在CSDN网站查询黄菊华老师的,在文章末尾可以获取联系方式
开发技术
- 开发环境:JDK1.8 + Tomcat8+
- 开发语言:Java
- 开发框架:springboot
- 模板引擎:Thymeleaf
- 开发工具:Idea2022
- 数据库:mysql8
- 数据库管理工具:navicat
- 其他开发语言:html + css +javascript
功能清单
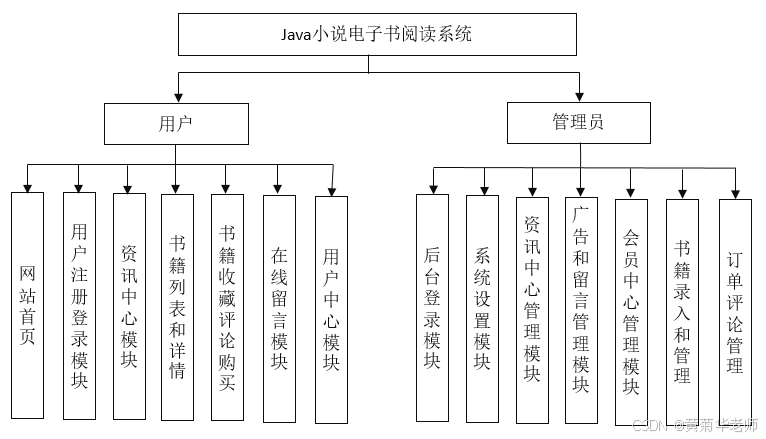
【后台功能】
系统设置:设置关于我们、联系我们、加入我们、法律声明
广告管理:设置小程序首页轮播图广告和链接
留言列表:所有用户留言信息列表,支持删除
会员列表:查看所有注册会员信息,支持删除
资讯分类:录入、修改、查看、删除资讯分类
录入资讯:录入资讯标题、内容等信息
管理资讯:查看已录入资讯列表,支持删除和修改
资讯评论列表:所有用户的评论信息列表
资讯评论管理:支持对评论信息审核,删除;审核后的信息用户才可见
图书分类设置:设置有哪些科目类型
录入图书:录入图书标题、选择分类、图书价格、上传图片、图书详细介绍
图书管理:列出所有图书信息、支持修改、删除
热门图书关键字:设置网站可以查询的热门图书关键字
图书目录管理:设置图书章节和对应内容,支持修改
图书订单列表:列出网站用户下单的所有订单信息
图书订单管理:支持删除操作
图书评论列表:列出用户对网站电影的评论信息
图书评论管理:支持修改审核操作、删除操作
【用户功能】
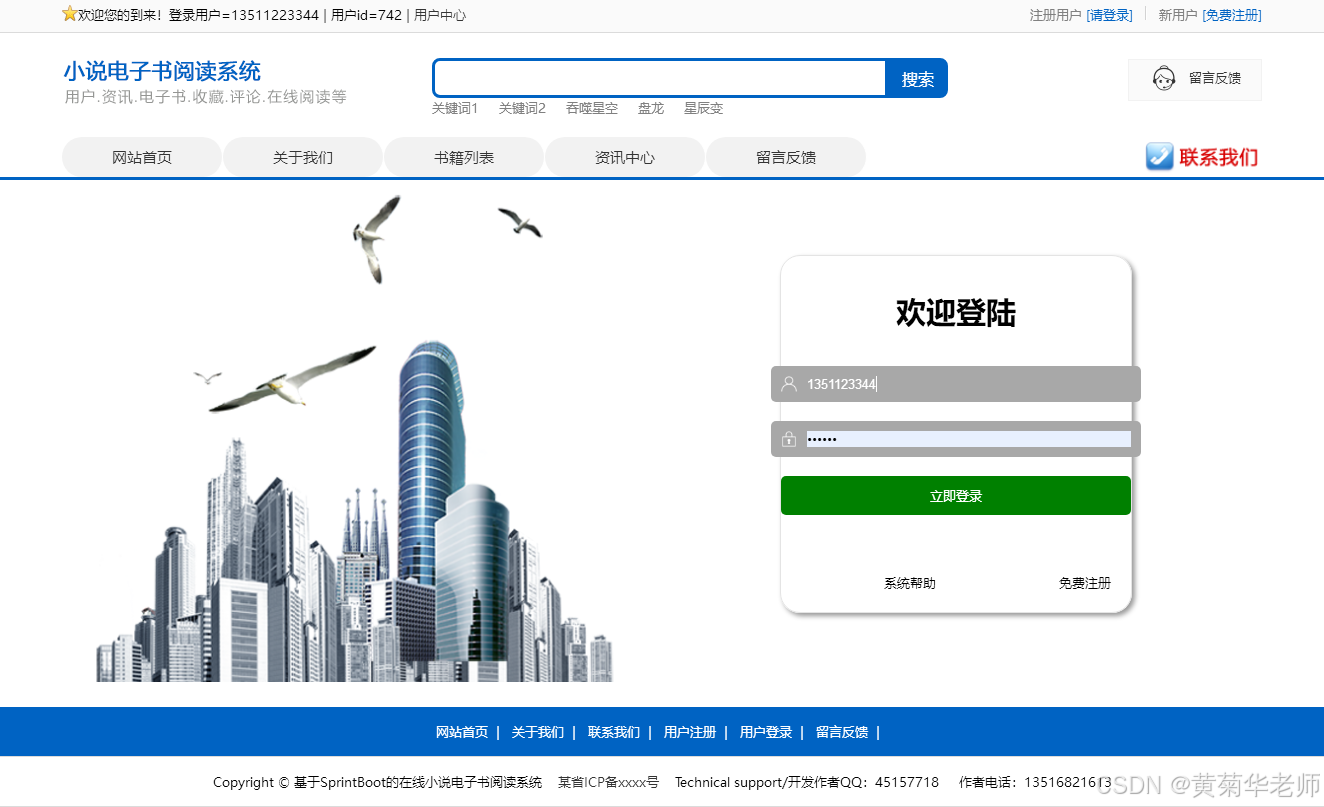
用户注册:填写手机账号和密码,注册新用户
登录功能:注册普通账号登录;登录后可以修改用户的基本信息,也可以退出。
关于我们:关于我们、联系我们、加入我们、法律声明
轮播广告:后台设置首页轮播广告图,可以连接到广告页面。
留言反馈:用户填写李哭咽的主题、联系人、电话、邮箱、留言内容;后台管理可以查看留言列表,可以删除留言。
图书列表:显示网站提供的所有图书信息;可以按图书的分类筛选。
图书查询:网站顶部可以输入图书关键字查询
图书详情:图书的介绍信息,包含封面,价格,介绍等
图书购买:在图书详情页面,点击“我要购买课程”,确认购买。
图书收藏:在图书详情页面,登录的用户,可以对当前图书进行收藏,收藏后的图书列表在用户中心可以查看,可以进行删除。
图书评论:在图书详情页面,登录的用户,可以填写评论内容,提交评论信息;提交的评论信息需要后台管理员审核后可见。
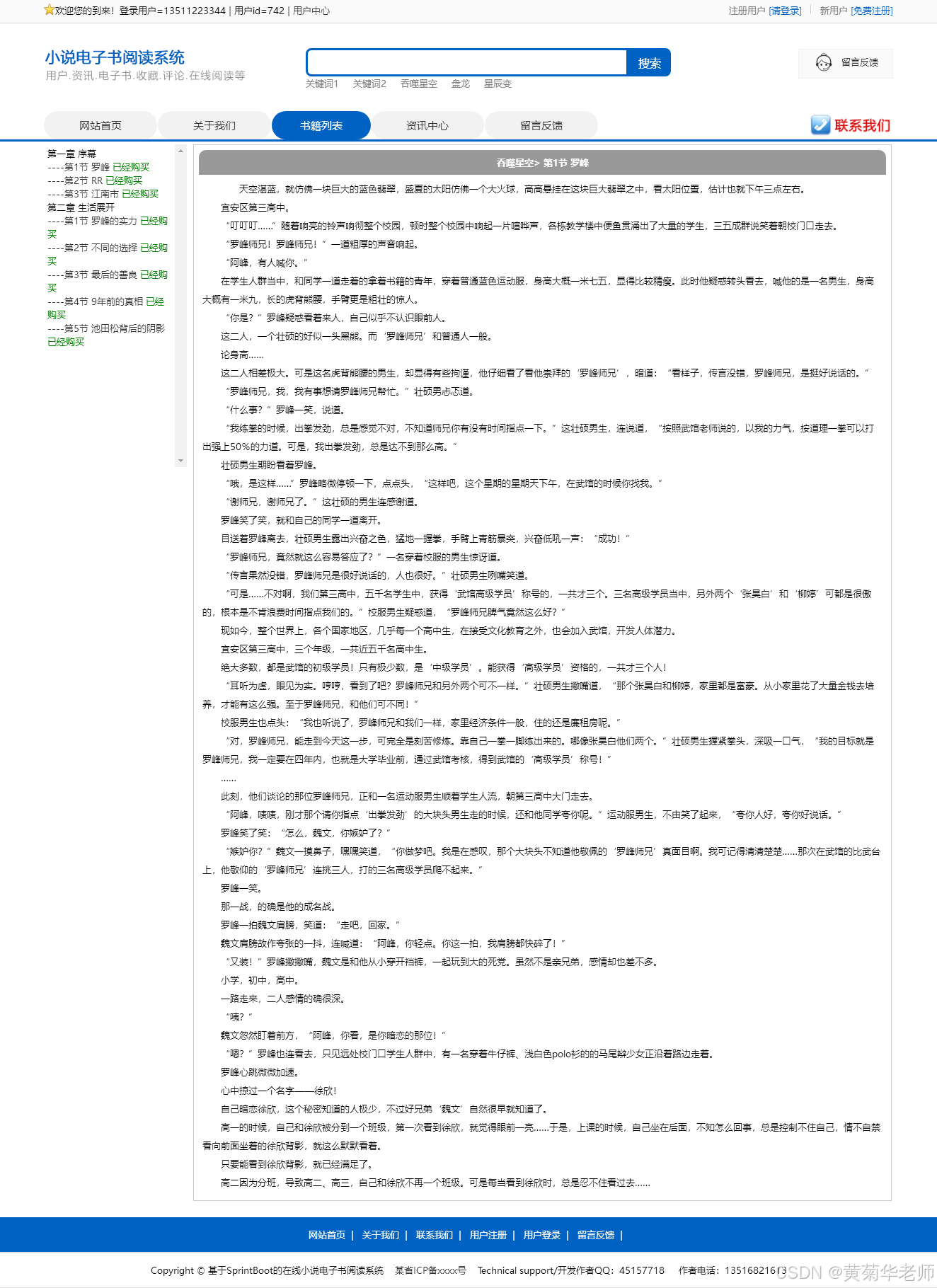
图书阅读:在线电子书阅读
我的图书列表:列出用户的所有购买的图书课程,可以点击图书课程名称,进入图书学习页面在线学习。
图书浏览、收藏、评论:列出用户浏览过的网站上的图书课程信息浏览记录;收藏过的图书课程信息列表,支持删除;评论过的信息列表和状态。
资讯浏览、收藏、评论:列出用户浏览过的网站上的资讯信息浏览记录;收藏过的资讯信息列表,支持删除;评论过的资讯信息列表和状态。
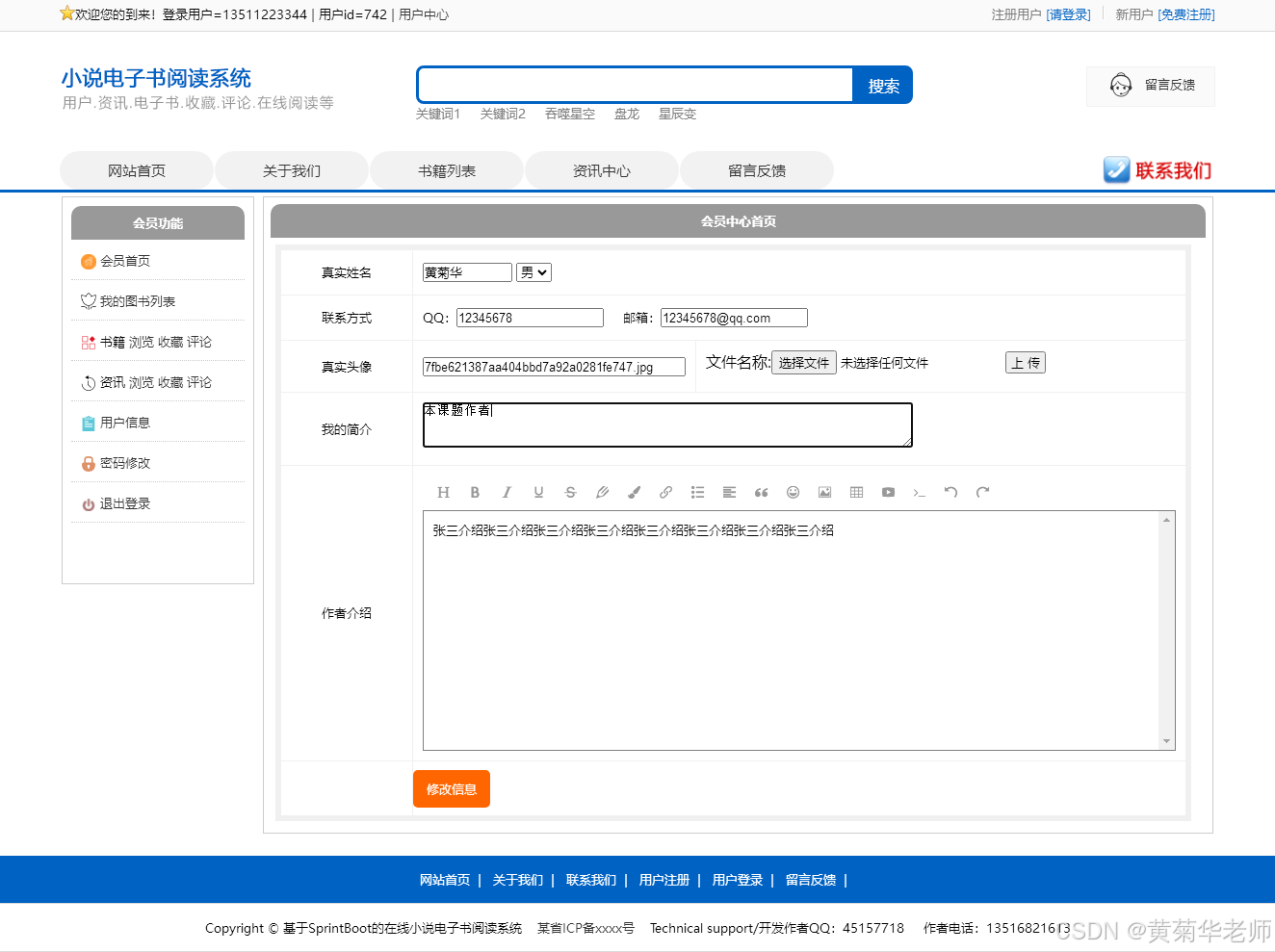
用户信息:姓名、联系方式、邮箱、头像、简介、介绍等,支持随时修改;用户注册的信息后台管理员可见;后台管理员可以删除。
密码修改:修改注册的密码。
退出登录:清除登录的cookie,返回到首页。










评论记录:
回复评论: