
linux C++ onnxruntime yolov8 视频检测Demo

目录
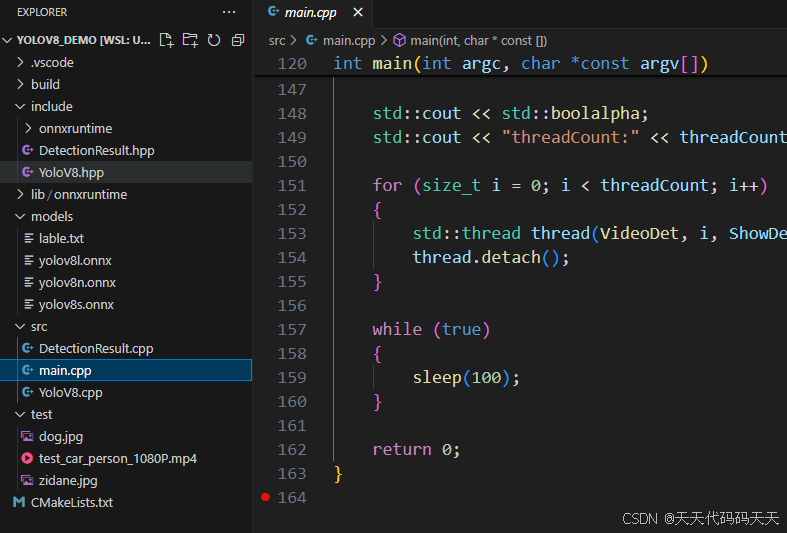
项目目录
效果
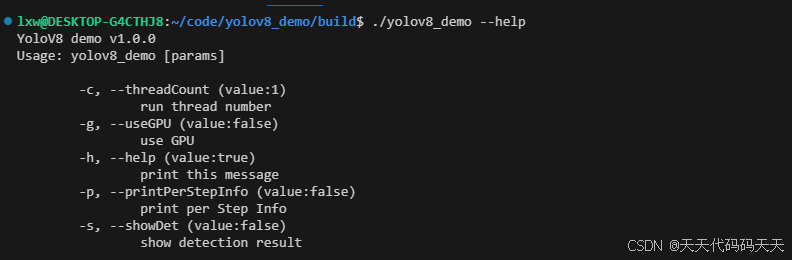
./yolov8_demo --help
./yolov8_demo -c=2 -p=true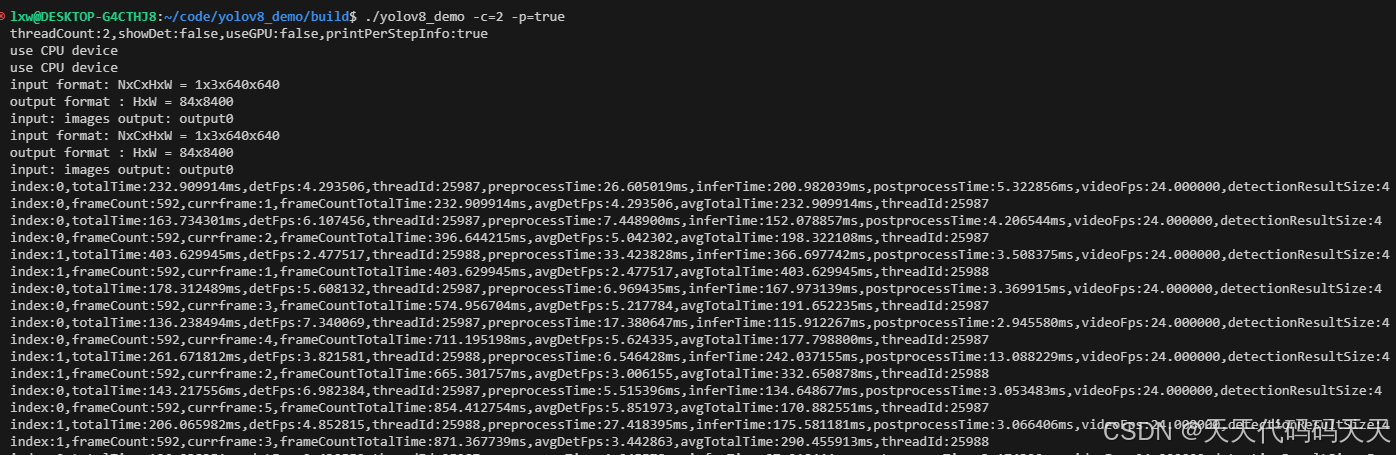
./yolov8_demo -c=1 -s=true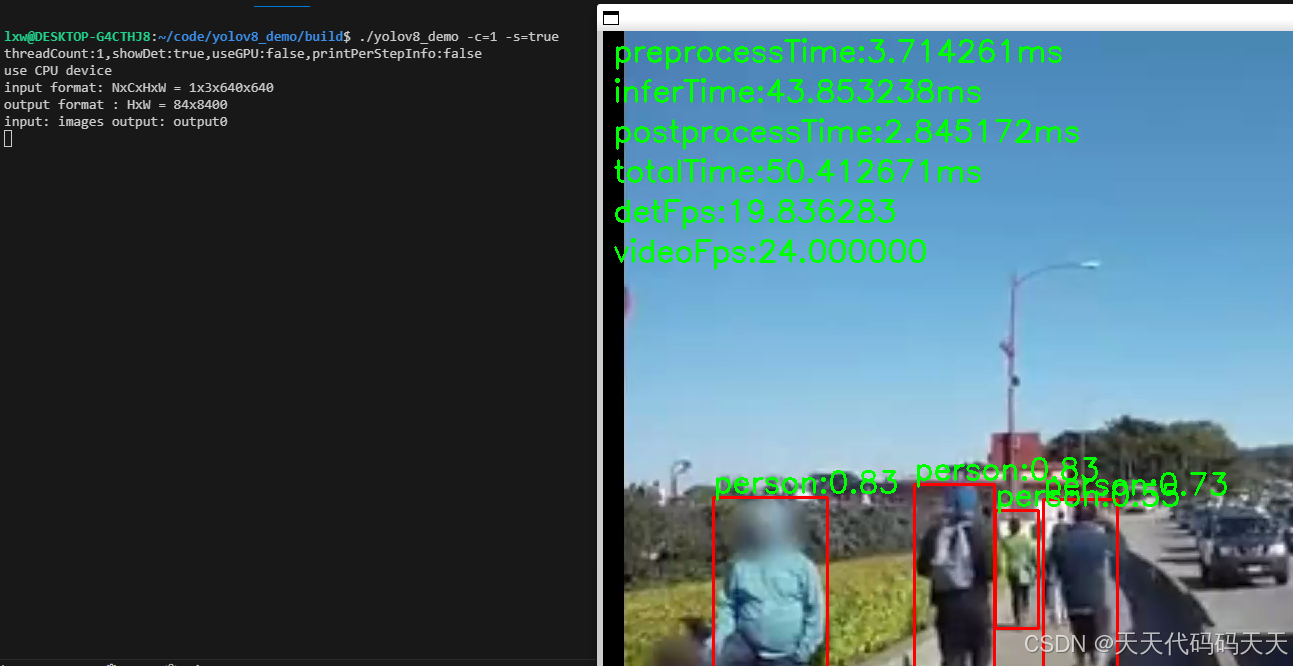
CMakeLists.txt
- # cmake needs this line
- cmake_minimum_required(VERSION 3.0)
-
- # Define project name
- project(yolov8_demo)
-
- # Release模式下的编译指令
- # SET(CMAKE_BUILD_TYPE "Release")
- # set(CMAKE_C_FLAGS_RELEASE "${CMAKE_C_FLAGS_RELEASE} -s")
- # set(CMAKE_CXX_FLAGS_RELEASE "${CMAKE_CXX_FLAGS_RELEASE} -std=c++17 -pthread -Wall -Wl")
-
- # Debug模式下的编译指令
- SET(CMAKE_BUILD_TYPE "Debug")
- set(CMAKE_C_FLAGS_RELEASE "${CMAKE_C_FLAGS_DEBUG}")
- set(CMAKE_CXX_FLAGS_DEBUG "${CMAKE_CXX_FLAGS_DEBUG} -std=c++17 -pthread")
-
- set(OpenCV_LIBS opencv_videoio opencv_imgcodecs opencv_imgproc opencv_core opencv_dnn opencv_highgui)
-
- include_directories(
- /usr/local/include/opencv4
- ${PROJECT_SOURCE_DIR}/include
- ${PROJECT_SOURCE_DIR}/include/onnxruntime
- )
-
- link_directories(
- ${PROJECT_SOURCE_DIR}/lib/onnxruntime # 第三方动态库文件
- /usr/local/lib/
- )
-
- #递归指定源码的路径
- file(GLOB_RECURSE SRCS ${PROJECT_SOURCE_DIR}/src/*.cpp)
-
- # Declare the executable target built from your sources
- add_executable(yolov8_demo ${SRCS})
-
- # Link your application with OpenCV libraries
- target_link_libraries(yolov8_demo
- -lonnxruntime
- ${OpenCV_LIBS}
- )
代码
main.cpp
#include <opencv2/core.hpp>
#include
#include
#include
#include
#include
#include
int VideoDet(int index, bool showDet, bool useGPU, bool printPerStepInfo)
{
size_t threadId = static_cast
// std::cout << "index:" << index << " thread id: " << threadId << std::endl;
cv::VideoCapture capture("./test/test_car_person_1080P.mp4");
// 检查视频是否成功打开
if (!capture.isOpened())
{
std::cout << "无法读取视频文件" << std::endl;
return -1;
}
int frameCount = capture.get(cv::CAP_PROP_FRAME_COUNT); // 获取视频帧数
double fps = capture.get(cv::CAP_PROP_FPS); // 获取帧率
int delay = int(1000 / fps); // 根据帧率计算帧间间隔时间
// delay=1;
std::string model_path = "./models/yolov8n.onnx";
std::string lable_path = "./models/lable.txt";
int GPUCount = 2;
int device_id = 0;
if (index >= GPUCount)
{
device_id = index % GPUCount;
}
else
{
device_id = index;
}
// device_id=0;
YoloV8 yoloV8(model_path, lable_path, useGPU, device_id);
yoloV8.index = index;
yoloV8.threadId = threadId;
yoloV8.videoFps = fps;
yoloV8.frameCount = frameCount;
// std::cout << "device_id:" << yoloV8.device_id << std::endl;
// vector
// Mat frame=cv::imread("../test/dog.jpg");
// yoloV8.Detect(frame, detectionResult);
// std::cout << "detectionResult size:" << detectionResult.size() << std::endl;
string winname = "detectionResult-" + std::to_string(index);
while (true)
{
double start = (double)cv::getTickCount();
delay = int(1000 / fps);
Mat frame;
bool success = capture.read(frame); // 读取一帧数据
// 检查是否成功读取帧
if (!success)
{
std::cout << "index:" << index << ",读取完毕" << std::endl;
yoloV8.PrintAvgCostTime();
break;
}
vector
yoloV8.Detect(frame, detectionResult);
// std::cout <<"index:"< yoloV8.detectionResultSize = detectionResult.size(); if (printPerStepInfo) { yoloV8.PrintCostTime(); yoloV8.PrintAvgCostTime(); } if (showDet) { yoloV8.Draw(frame, detectionResult); imshow(winname, frame); double costTime = ((double)getTickCount() - start) / getTickFrequency(); delay = delay - costTime; if (delay <= 0) { delay = 1; } if (waitKey(delay) == 27) // 通过按下ESC键退出循环 { break; } } } capture.release(); // 释放视频对象 if (showDet) { cv::destroyWindow(winname); } return 0; } int main(int argc, char *const argv[]) { int threadCount = 1; bool showDet = false; bool useGPU = false; bool printPerStepInfo = true; const char *keys ="{h help || print this message}" "{c threadCount | 1 | run thread number}" "{s showDet | false | show detection result}" "{g useGPU | false | use GPU}" "{p printPerStepInfo | false | print per Step Info}"; cv::CommandLineParser parser(argc, argv, keys); if(parser.has("help")) { parser.about("YoloV8 demo v1.0.0"); parser.printMessage(); return 0; } threadCount=parser.get showDet=parser.get useGPU=parser.get printPerStepInfo=parser.get std::cout << std::boolalpha; std::cout << "threadCount:" << threadCount << ",showDet:" << showDet<< ",useGPU:" << useGPU << ",printPerStepInfo:" << printPerStepInfo << std::endl; for (size_t i = 0; i < threadCount; i++) { std::thread thread(VideoDet, i, showDet, useGPU, printPerStepInfo); thread.detach(); } while (true) { sleep(100); } return 0; }下载
 微信公众号
微信公众号

评论记录:
回复评论: