
前言
本文记录在FoundationPose中,跑通基于CAD模型为输入的demo,输出位姿信息,可视化结果。
然后分享NeRF物体重建部分的训练,以及RGBD图为输入的demo。
1、搭建环境
方案1:基于docker镜像(推荐)
首先下载开源代码:https://github.com/NVlabs/FoundationPose
然后执行下面命令,拉取镜像,并构建镜像环境
- cd docker/
- docker pull wenbowen123/foundationpose && docker tag wenbowen123/foundationpose foundationpose
- bash docker/run_container.sh
- bash build_all.sh
构建完成后,可以用docker exec 进入镜像容器中。
方案2:基于Conda(比较麻烦)
首先安装 Eigen3
- cd $HOME && wget -q https://gitlab.com/libeigen/eigen/-/archive/3.4.0/eigen-3.4.0.tar.gz && \
- tar -xzf eigen-3.4.0.tar.gz && \
- cd eigen-3.4.0 && mkdir build && cd build
- cmake .. -Wno-dev -DCMAKE_BUILD_TYPE=Release -DCMAKE_CXX_FLAGS=-std=c++14 ..
- sudo make install
- cd $HOME && rm -rf eigen-3.4.0 eigen-3.4.0.tar.gz
然后参考下面命令,创建conda环境
- # create conda environment
- create -n foundationpose python=3.9
-
- # activate conda environment
- conda activate foundationpose
-
- # install dependencies
- python -m pip install -r requirements.txt
-
- # Install NVDiffRast
- python -m pip install --quiet --no-cache-dir git+https://github.com/NVlabs/nvdiffrast.git
-
- # Kaolin (Optional, needed if running model-free setup)
- python -m pip install --quiet --no-cache-dir kaolin==0.15.0 -f https://nvidia-kaolin.s3.us-east-2.amazonaws.com/torch-2.0.0_cu118.html
-
- # PyTorch3D
- python -m pip install --quiet --no-index --no-cache-dir pytorch3d -f https://dl.fbaipublicfiles.com/pytorch3d/packaging/wheels/py39_cu118_pyt200/download.html
-
- # Build extensions
- CMAKE_PREFIX_PATH=$CONDA_PREFIX/lib/python3.9/site-packages/pybind11/share/cmake/pybind11 bash build_all_conda.sh

2、基于CAD模型为输入的demo
首先,下载模型权重,里面包括两个文件夹;点击下载(模型权重)
在工程目录中创建weights/,将下面两个文件夹放到里面。
然后,下载测试数据,里面包括两个压缩文件;点击下载(demo数据)
在工程目录中创建demo_data/,加压文件,将下面两个文件放到里面。
运行 run_demo.py,实现CAD模型为输入的demo
python run_demo.py --debug 2如果是服务器运行,没有可视化的,需要注释两行代码:
if debug>=1:
center_pose = [email protected](to_origin)
vis = draw_posed_3d_box(reader.K, img=color, ob_in_cam=center_pose, bbox=bbox)
vis = draw_xyz_axis(color, ob_in_cam=center_pose, scale=0.1, K=reader.K, thickness=3, transparency=0, is_input_rgb=True)
# cv2.imshow('1', vis[...,::-1])
# cv2.waitKey(1)
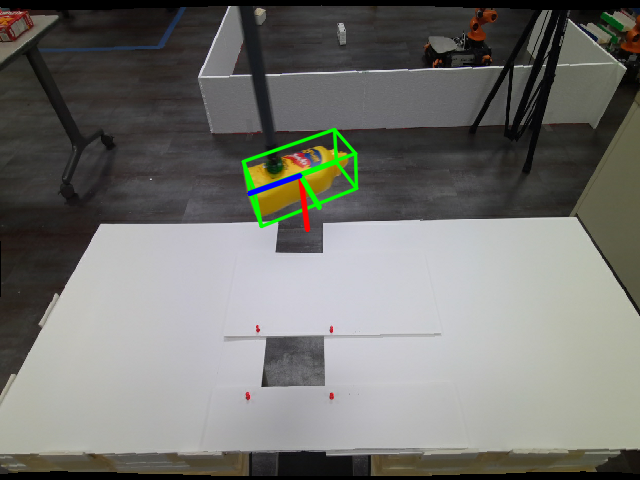
然后看到demo_data/mustard0/,里面生成了ob_in_cam、track_vis文件夹
ob_in_cam 是位姿估计的结果,用txt文件存储,示例文件:
- 6.073544621467590332e-01 -2.560715079307556152e-01 7.520291209220886230e-01 -4.481770694255828857e-01
- -7.755840420722961426e-01 -3.960975110530853271e-01 4.915038347244262695e-01 1.187708452343940735e-01
- 1.720167100429534912e-01 -8.817789554595947266e-01 -4.391765296459197998e-01 8.016449213027954102e-01
- 0.000000000000000000e+00 0.000000000000000000e+00 0.000000000000000000e+00 1.000000000000000000e+00
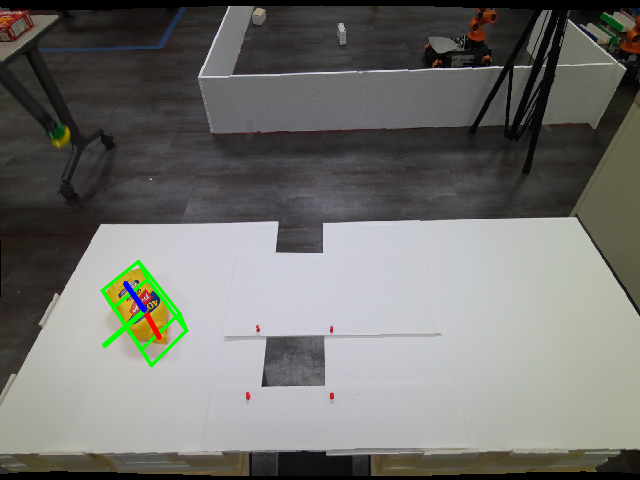
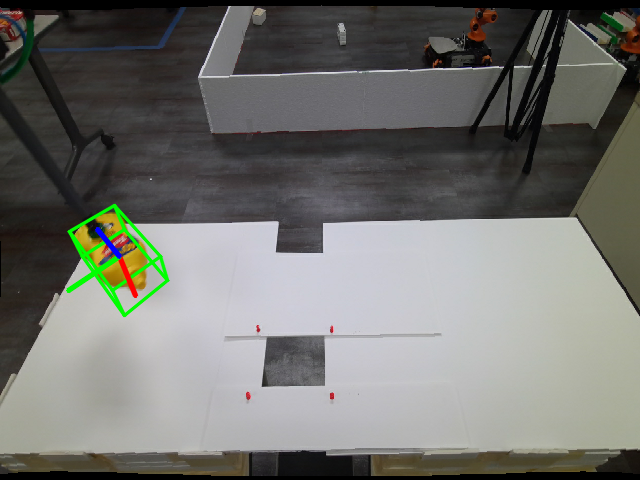
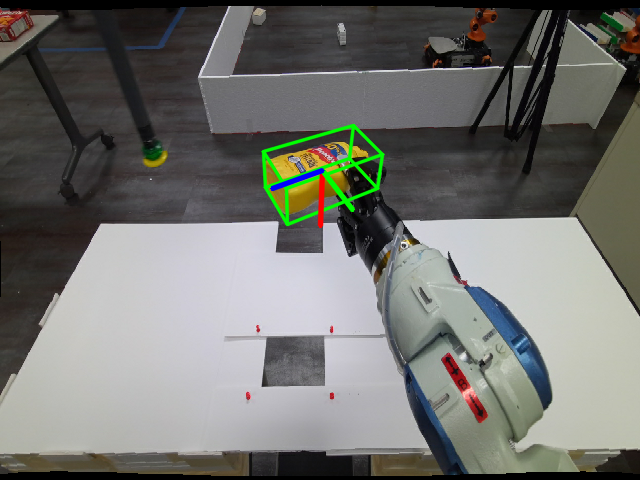
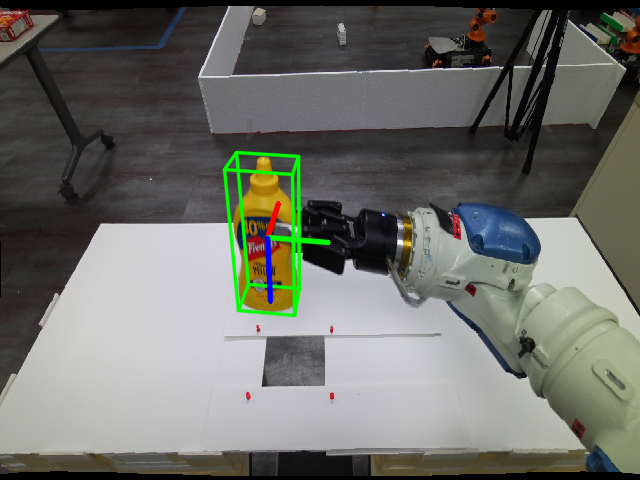
track_vis 是可视化结果,能看到多张图片:
3、NeRF物体重建训练
下载训练数据,Linemod和YCB-V两个公开数据集的示例:

示例1:训练Linemod数据集
修改代码bundlesdf/run_nerf.py,修改为use_refined_mask=False,即98行:
mesh = run_one_ob(base_dir=base_dir, cfg=cfg, use_refined_mask=False)
然后执行命令:
python bundlesdf/run_nerf.py --ref_view_dir /DATASET/lm_ref_views --dataset linemod如果是服务器运行,没有可视化的,需要安装xvfb
- sudo apt-get update
- sudo apt-get install -y xvfb
然后执行命令:
xvfb-run -s "-screen 0 1024x768x24" python bundlesdf/run_nerf.py --ref_view_dir model_free_ref_views/lm_ref_views --dataset linemod因为训练NeRF需要渲染的,使用xvfb进行模拟。
能看到打印信息:
- bundlesdf/run_nerf.py:61: DeprecationWarning: Starting with ImageIO v3 the behavior of this function will switch to that of iio.v3.imread. To keep the current behavior (and make this warning disappear) use `import imageio.v2 as imageio` or call `imageio.v2.imread` directly.
- rgb = imageio.imread(color_file)
- [compute_scene_bounds()] compute_scene_bounds_worker start
- [compute_scene_bounds()] compute_scene_bounds_worker done
- [compute_scene_bounds()] merge pcd
- [compute_scene_bounds()] compute_translation_scales done
- translation_cvcam=[0.00024226 0.00356217 0.00056694], sc_factor=19.274929219577043
- [build_octree()] Octree voxel dilate_radius:1
- [__init__()] level:0, vox_pts:torch.Size([1, 3]), corner_pts:torch.Size([8, 3])
- [__init__()] level:1, vox_pts:torch.Size([8, 3]), corner_pts:torch.Size([27, 3])
- [__init__()] level:2, vox_pts:torch.Size([64, 3]), corner_pts:torch.Size([125, 3])
- [draw()] level:2
- [draw()] level:2
- level 0, resolution: 32
- level 1, resolution: 37
- level 2, resolution: 43
- level 3, resolution: 49
- level 4, resolution: 56
- level 5, resolution: 64
- level 6, resolution: 74
- level 7, resolution: 85
- level 8, resolution: 98
- level 9, resolution: 112
- level 10, resolution: 128
- level 11, resolution: 148
- level 12, resolution: 169
- level 13, resolution: 195
- level 14, resolution: 223
- level 15, resolution: 256
- GridEncoder: input_dim=3 n_levels=16 level_dim=2 resolution=32 -> 256 per_level_scale=1.1487 params=(26463840, 2) gridtype=hash align_corners=False
- sc_factor 19.274929219577043
- translation [0.00024226 0.00356217 0.00056694]
- [__init__()] denoise cloud
- [__init__()] Denoising rays based on octree cloud
- [__init__()] bad_mask#=3
- rays torch.Size([128387, 12])
- [train()] train progress 0/1001
- [train_loop()] Iter: 0, valid_samples: 524161/524288, valid_rays: 2048/2048, loss: 309.0942383, rgb_loss: 0.0216732, rgb0_loss: 0.0000000, fs_rgb_loss: 0.0000000, depth_loss: 0.0000000, depth_loss0: 0.0000000, fs_loss: 301.6735840, point_cloud_loss: 0.0000000, point_cloud_normal_loss: 0.0000000, sdf_loss: 7.2143111, eikonal_loss: 0.0000000, variation_loss: 0.0000000, truncation(meter): 0.0100000, pose_reg: 0.0000000, reg_features: 0.1152707,
-
- [train()] train progress 100/1001
- [train()] train progress 200/1001
- [train()] train progress 300/1001
- [train()] train progress 400/1001
- [train()] train progress 500/1001
- Saved checkpoints at model_free_ref_views/lm_ref_views/ob_0000001/nerf/model_latest.pth
- [train_loop()] Iter: 500, valid_samples: 518554/524288, valid_rays: 2026/2048, loss: 1.0530750, rgb_loss: 0.0009063, rgb0_loss: 0.0000000, fs_rgb_loss: 0.0000000, depth_loss: 0.0000000, depth_loss0: 0.0000000, fs_loss: 0.2142579, point_cloud_loss: 0.0000000, point_cloud_normal_loss: 0.0000000, sdf_loss: 0.8360301, eikonal_loss: 0.0000000, variation_loss: 0.0000000, truncation(meter): 0.0100000, pose_reg: 0.0000000, reg_features: 0.0008409,
-
- [extract_mesh()] query_pts:torch.Size([42875, 3]), valid:42875
- [extract_mesh()] Running Marching Cubes
- [extract_mesh()] done V:(4536, 3), F:(8986, 3)
- [train()] train progress 600/1001
- [train()] train progress 700/1001
- [train()] train progress 800/1001
- [train()] train progress 900/1001
- [train()] train progress 1000/1001
- Saved checkpoints at model_free_ref_views/lm_ref_views/ob_0000001/nerf/model_latest.pth
- [train_loop()] Iter: 1000, valid_samples: 519351/524288, valid_rays: 2029/2048, loss: 0.4827633, rgb_loss: 0.0006563, rgb0_loss: 0.0000000, fs_rgb_loss: 0.0000000, depth_loss: 0.0000000, depth_loss0: 0.0000000, fs_loss: 0.0935674, point_cloud_loss: 0.0000000, point_cloud_normal_loss: 0.0000000, sdf_loss: 0.3876466, eikonal_loss: 0.0000000, variation_loss: 0.0000000, truncation(meter): 0.0100000, pose_reg: 0.0000000, reg_features: 0.0001022,
-
- [extract_mesh()] query_pts:torch.Size([42875, 3]), valid:42875
- [extract_mesh()] Running Marching Cubes
- [extract_mesh()] done V:(5265, 3), F:(10328, 3)
- [extract_mesh()] query_pts:torch.Size([42875, 3]), valid:42875
- [extract_mesh()] Running Marching Cubes
- [extract_mesh()] done V:(5265, 3), F:(10328, 3)
- [
()] OpenGL_accelerate module loaded - [
()] Using accelerated ArrayDatatype - [mesh_texture_from_train_images()] Texture: Texture map computation
- project train_images 0/16
- project train_images 1/16
- project train_images 2/16
- project train_images 3/16
- project train_images 4/16
- project train_images 5/16
- project train_images 6/16
- project train_images 7/16
- project train_images 8/16
- project train_images 9/16
- project train_images 10/16
- project train_images 11/16
- project train_images 12/16
- project train_images 13/16
- project train_images 14/16
- project train_images 15/16
重点留意,损失的变化:
[train()] train progress 0/1001
[train_loop()] Iter: 0, valid_samples: 524161/524288, valid_rays: 2048/2048, loss: 309.0942383, rgb_loss: 0.0216732, rgb0_loss: 0.0000000, fs_rgb_loss: 0.0000000, depth_loss: 0.0000000, depth_loss0: 0.0000000, fs_loss: 301.6735840, point_cloud_loss: 0.0000000, point_cloud_normal_loss: 0.0000000, sdf_loss: 7.2143111, eikonal_loss: 0.0000000, variation_loss: 0.0000000, truncation(meter): 0.0100000, pose_reg: 0.0000000, reg_features: 0.1152707,[train()] train progress 100/1001
[train()] train progress 200/1001
[train()] train progress 300/1001
[train()] train progress 400/1001
[train()] train progress 500/1001
Saved checkpoints at model_free_ref_views/lm_ref_views/ob_0000001/nerf/model_latest.pth
[train_loop()] Iter: 500, valid_samples: 518554/524288, valid_rays: 2026/2048, loss: 1.0530750, rgb_loss: 0.0009063, rgb0_loss: 0.0000000, fs_rgb_loss: 0.0000000, depth_loss: 0.0000000, depth_loss0: 0.0000000, fs_loss: 0.2142579, point_cloud_loss: 0.0000000, point_cloud_normal_loss: 0.0000000, sdf_loss: 0.8360301, eikonal_loss: 0.0000000, variation_loss: 0.0000000, truncation(meter): 0.0100000, pose_reg: 0.0000000, reg_features: 0.0008409,
默认训练1000轮,训练也挺快的。
在lm_ref_views/ob_0000001/中生成了nerf文件夹,存放下面文件:
在lm_ref_views/ob_0000001/model中,生成了的model.obj,后续模型推理或demo直接使用它。
示例2:训练YCB-V数据集
python bundlesdf/run_nerf.py --ref_view_dir /DATASET/ycbv/ref_views_16 --dataset ycbv如果是服务器运行,没有可视化的,需要安装xvfb
- sudo apt-get update
- sudo apt-get install -y xvfb
然后执行命令:
xvfb-run -s "-screen 0 1024x768x24" python bundlesdf/run_nerf.py --ref_view_dir /DATASET/ycbv/ref_views_16 --dataset ycbv因为训练NeRF需要渲染的,使用xvfb进行模拟。
4、RGBD图输入demo
这里以Linemod数据集为示例,首先下面测试数据集
然后加压文件,存放路径:FoundationPose-main/model_free_ref_views/lm_test_all
官方代码有问题,需要替换两个代码:datareader.py、run_linemod.py
run_linemod.py
- # Copyright (c) 2023, NVIDIA CORPORATION. All rights reserved.
- #
- # NVIDIA CORPORATION and its licensors retain all intellectual property
- # and proprietary rights in and to this software, related documentation
- # and any modifications thereto. Any use, reproduction, disclosure or
- # distribution of this software and related documentation without an express
- # license agreement from NVIDIA CORPORATION is strictly prohibited.
-
-
- from Utils import *
- import json,uuid,joblib,os,sys
- import scipy.spatial as spatial
- from multiprocessing import Pool
- import multiprocessing
- from functools import partial
- from itertools import repeat
- import itertools
- from datareader import *
- from estimater import *
- code_dir = os.path.dirname(os.path.realpath(__file__))
- sys.path.append(f'{code_dir}/mycpp/build')
- import yaml
- import re
-
-
- def get_mask(reader, i_frame, ob_id, detect_type):
- if detect_type=='box':
- mask = reader.get_mask(i_frame, ob_id)
- H,W = mask.shape[:2]
- vs,us = np.where(mask>0)
- umin = us.min()
- umax = us.max()
- vmin = vs.min()
- vmax = vs.max()
- valid = np.zeros((H,W), dtype=bool)
- valid[vmin:vmax,umin:umax] = 1
- elif detect_type=='mask':
- mask = reader.get_mask(i_frame, ob_id)
- if mask is None:
- return None
- valid = mask>0
- elif detect_type=='detected':
- mask = cv2.imread(reader.color_files[i_frame].replace('rgb','mask_cosypose'), -1)
- valid = mask==ob_id
- else:
- raise RuntimeError
- return valid
-
-
-
- def run_pose_estimation_worker(reader, i_frames, est:FoundationPose=None, debug=0, ob_id=None, device='cuda:0'):
- torch.cuda.set_device(device)
- est.to_device(device)
- est.glctx = dr.RasterizeCudaContext(device=device)
-
- result = NestDict()
-
- for i, i_frame in enumerate(i_frames):
- logging.info(f"{i}/{len(i_frames)}, i_frame:{i_frame}, ob_id:{ob_id}")
- print("\n### ", f"{i}/{len(i_frames)}, i_frame:{i_frame}, ob_id:{ob_id}")
- video_id = reader.get_video_id()
- color = reader.get_color(i_frame)
- depth = reader.get_depth(i_frame)
- id_str = reader.id_strs[i_frame]
- H,W = color.shape[:2]
-
- debug_dir =est.debug_dir
-
- ob_mask = get_mask(reader, i_frame, ob_id, detect_type=detect_type)
- if ob_mask is None:
- logging.info("ob_mask not found, skip")
- result[video_id][id_str][ob_id] = np.eye(4)
- return result
-
- est.gt_pose = reader.get_gt_pose(i_frame, ob_id)
-
- pose = est.register(K=reader.K, rgb=color, depth=depth, ob_mask=ob_mask, ob_id=ob_id)
- logging.info(f"pose:\n{pose}")
-
- if debug>=3:
- m = est.mesh_ori.copy()
- tmp = m.copy()
- tmp.apply_transform(pose)
- tmp.export(f'{debug_dir}/model_tf.obj')
-
- result[video_id][id_str][ob_id] = pose
-
- return result, pose
-
-
- def run_pose_estimation():
- wp.force_load(device='cuda')
- reader_tmp = LinemodReader(opt.linemod_dir, split=None)
- print("## opt.linemod_dir:", opt.linemod_dir)
-
- debug = opt.debug
- use_reconstructed_mesh = opt.use_reconstructed_mesh
- debug_dir = opt.debug_dir
-
- res = NestDict()
- glctx = dr.RasterizeCudaContext()
- mesh_tmp = trimesh.primitives.Box(extents=np.ones((3)), transform=np.eye(4)).to_mesh()
- est = FoundationPose(model_pts=mesh_tmp.vertices.copy(), model_normals=mesh_tmp.vertex_normals.copy(), symmetry_tfs=None, mesh=mesh_tmp, scorer=None, refiner=None, glctx=glctx, debug_dir=debug_dir, debug=debug)
-
- # ob_id
- match = re.search(r'\d+$', opt.linemod_dir)
- if match:
- last_number = match.group()
- ob_id = int(last_number)
- else:
- print("No digits found at the end of the string")
-
- # for ob_id in reader_tmp.ob_ids:
- if ob_id:
- if use_reconstructed_mesh:
- print("## ob_id:", ob_id)
- print("## opt.linemod_dir:", opt.linemod_dir)
- print("## opt.ref_view_dir:", opt.ref_view_dir)
- mesh = reader_tmp.get_reconstructed_mesh(ref_view_dir=opt.ref_view_dir)
- else:
- mesh = reader_tmp.get_gt_mesh(ob_id)
- # symmetry_tfs = reader_tmp.symmetry_tfs[ob_id] # !!!!!!!!!!!!!!!!
-
- args = []
-
- reader = LinemodReader(opt.linemod_dir, split=None)
- video_id = reader.get_video_id()
- # est.reset_object(model_pts=mesh.vertices.copy(), model_normals=mesh.vertex_normals.copy(), symmetry_tfs=symmetry_tfs, mesh=mesh) # raw
- est.reset_object(model_pts=mesh.vertices.copy(), model_normals=mesh.vertex_normals.copy(), mesh=mesh) # !!!!!!!!!!!!!!!!
-
- print("### len(reader.color_files):", len(reader.color_files))
- for i in range(len(reader.color_files)):
- args.append((reader, [i], est, debug, ob_id, "cuda:0"))
-
- # vis Data
- to_origin, extents = trimesh.bounds.oriented_bounds(mesh)
- bbox = np.stack([-extents/2, extents/2], axis=0).reshape(2,3)
- os.makedirs(f'{opt.linemod_dir}/track_vis', exist_ok=True)
-
- outs = []
- i = 0
- for arg in args[:200]:
- print("### num:", i)
- out, pose = run_pose_estimation_worker(*arg)
- outs.append(out)
- center_pose = [email protected](to_origin)
- img_color = reader.get_color(i)
- vis = draw_posed_3d_box(reader.K, img=img_color, ob_in_cam=center_pose, bbox=bbox)
- vis = draw_xyz_axis(img_color, ob_in_cam=center_pose, scale=0.1, K=reader.K, thickness=3, transparency=0, is_input_rgb=True)
- imageio.imwrite(f'{opt.linemod_dir}/track_vis/{reader.id_strs[i]}.png', vis)
- i = i + 1
-
- for out in outs:
- for video_id in out:
- for id_str in out[video_id]:
- for ob_id in out[video_id][id_str]:
- res[video_id][id_str][ob_id] = out[video_id][id_str][ob_id]
-
- with open(f'{opt.debug_dir}/linemod_res.yml','w') as ff:
- yaml.safe_dump(make_yaml_dumpable(res), ff)
- print("Save linemod_res.yml OK !!!")
-
-
- if __name__=='__main__':
- parser = argparse.ArgumentParser()
- code_dir = os.path.dirname(os.path.realpath(__file__))
- parser.add_argument('--linemod_dir', type=str, default="/guopu/FoundationPose-main/model_free_ref_views/lm_test_all/000015", help="linemod root dir") # lm_test_all lm_test
- parser.add_argument('--use_reconstructed_mesh', type=int, default=1)
- parser.add_argument('--ref_view_dir', type=str, default="/guopu/FoundationPose-main/model_free_ref_views/lm_ref_views/ob_0000015")
- parser.add_argument('--debug', type=int, default=0)
- parser.add_argument('--debug_dir', type=str, default=f'/guopu/FoundationPose-main/model_free_ref_views/lm_test_all/debug') # lm_test_all lm_test
- opt = parser.parse_args()
- set_seed(0)
-
- detect_type = 'mask' # mask / box / detected
- run_pose_estimation()
-
datareader.py
- # Copyright (c) 2023, NVIDIA CORPORATION. All rights reserved.
- #
- # NVIDIA CORPORATION and its licensors retain all intellectual property
- # and proprietary rights in and to this software, related documentation
- # and any modifications thereto. Any use, reproduction, disclosure or
- # distribution of this software and related documentation without an express
- # license agreement from NVIDIA CORPORATION is strictly prohibited.
-
-
- from Utils import *
- import json,os,sys
-
-
- BOP_LIST = ['lmo','tless','ycbv','hb','tudl','icbin','itodd']
- BOP_DIR = os.getenv('BOP_DIR')
-
- def get_bop_reader(video_dir, zfar=np.inf):
- if 'ycbv' in video_dir or 'YCB' in video_dir:
- return YcbVideoReader(video_dir, zfar=zfar)
- if 'lmo' in video_dir or 'LINEMOD-O' in video_dir:
- return LinemodOcclusionReader(video_dir, zfar=zfar)
- if 'tless' in video_dir or 'TLESS' in video_dir:
- return TlessReader(video_dir, zfar=zfar)
- if 'hb' in video_dir:
- return HomebrewedReader(video_dir, zfar=zfar)
- if 'tudl' in video_dir:
- return TudlReader(video_dir, zfar=zfar)
- if 'icbin' in video_dir:
- return IcbinReader(video_dir, zfar=zfar)
- if 'itodd' in video_dir:
- return ItoddReader(video_dir, zfar=zfar)
- else:
- raise RuntimeError
-
-
- def get_bop_video_dirs(dataset):
- if dataset=='ycbv':
- video_dirs = sorted(glob.glob(f'{BOP_DIR}/ycbv/test/*'))
- elif dataset=='lmo':
- video_dirs = sorted(glob.glob(f'{BOP_DIR}/lmo/lmo_test_bop19/test/*'))
- elif dataset=='tless':
- video_dirs = sorted(glob.glob(f'{BOP_DIR}/tless/tless_test_primesense_bop19/test_primesense/*'))
- elif dataset=='hb':
- video_dirs = sorted(glob.glob(f'{BOP_DIR}/hb/hb_test_primesense_bop19/test_primesense/*'))
- elif dataset=='tudl':
- video_dirs = sorted(glob.glob(f'{BOP_DIR}/tudl/tudl_test_bop19/test/*'))
- elif dataset=='icbin':
- video_dirs = sorted(glob.glob(f'{BOP_DIR}/icbin/icbin_test_bop19/test/*'))
- elif dataset=='itodd':
- video_dirs = sorted(glob.glob(f'{BOP_DIR}/itodd/itodd_test_bop19/test/*'))
- else:
- raise RuntimeError
- return video_dirs
-
-
-
- class YcbineoatReader:
- def __init__(self,video_dir, downscale=1, shorter_side=None, zfar=np.inf):
- self.video_dir = video_dir
- self.downscale = downscale
- self.zfar = zfar
- self.color_files = sorted(glob.glob(f"{self.video_dir}/rgb/*.png"))
- self.K = np.loadtxt(f'{video_dir}/cam_K.txt').reshape(3,3)
- self.id_strs = []
- for color_file in self.color_files:
- id_str = os.path.basename(color_file).replace('.png','')
- self.id_strs.append(id_str)
- self.H,self.W = cv2.imread(self.color_files[0]).shape[:2]
-
- if shorter_side is not None:
- self.downscale = shorter_side/min(self.H, self.W)
-
- self.H = int(self.H*self.downscale)
- self.W = int(self.W*self.downscale)
- self.K[:2] *= self.downscale
-
- self.gt_pose_files = sorted(glob.glob(f'{self.video_dir}/annotated_poses/*'))
-
- self.videoname_to_object = {
- 'bleach0': "021_bleach_cleanser",
- 'bleach_hard_00_03_chaitanya': "021_bleach_cleanser",
- 'cracker_box_reorient': '003_cracker_box',
- 'cracker_box_yalehand0': '003_cracker_box',
- 'mustard0': '006_mustard_bottle',
- 'mustard_easy_00_02': '006_mustard_bottle',
- 'sugar_box1': '004_sugar_box',
- 'sugar_box_yalehand0': '004_sugar_box',
- 'tomato_soup_can_yalehand0': '005_tomato_soup_can',
- }
-
-
- def get_video_name(self):
- return self.video_dir.split('/')[-1]
-
- def __len__(self):
- return len(self.color_files)
-
- def get_gt_pose(self,i):
- try:
- pose = np.loadtxt(self.gt_pose_files[i]).reshape(4,4)
- return pose
- except:
- logging.info("GT pose not found, return None")
- return None
-
-
- def get_color(self,i):
- color = imageio.imread(self.color_files[i])[...,:3]
- color = cv2.resize(color, (self.W,self.H), interpolation=cv2.INTER_NEAREST)
- return color
-
- def get_mask(self,i):
- mask = cv2.imread(self.color_files[i].replace('rgb','masks'),-1)
- if len(mask.shape)==3:
- for c in range(3):
- if mask[...,c].sum()>0:
- mask = mask[...,c]
- break
- mask = cv2.resize(mask, (self.W,self.H), interpolation=cv2.INTER_NEAREST).astype(bool).astype(np.uint8)
- return mask
-
- def get_depth(self,i):
- depth = cv2.imread(self.color_files[i].replace('rgb','depth'),-1)/1e3
- depth = cv2.resize(depth, (self.W,self.H), interpolation=cv2.INTER_NEAREST)
- depth[(depth<0.1) | (depth>=self.zfar)] = 0
- return depth
-
-
- def get_xyz_map(self,i):
- depth = self.get_depth(i)
- xyz_map = depth2xyzmap(depth, self.K)
- return xyz_map
-
- def get_occ_mask(self,i):
- hand_mask_file = self.color_files[i].replace('rgb','masks_hand')
- occ_mask = np.zeros((self.H,self.W), dtype=bool)
- if os.path.exists(hand_mask_file):
- occ_mask = occ_mask | (cv2.imread(hand_mask_file,-1)>0)
-
- right_hand_mask_file = self.color_files[i].replace('rgb','masks_hand_right')
- if os.path.exists(right_hand_mask_file):
- occ_mask = occ_mask | (cv2.imread(right_hand_mask_file,-1)>0)
-
- occ_mask = cv2.resize(occ_mask, (self.W,self.H), interpolation=cv2.INTER_NEAREST)
-
- return occ_mask.astype(np.uint8)
-
- def get_gt_mesh(self):
- ob_name = self.videoname_to_object[self.get_video_name()]
- YCB_VIDEO_DIR = os.getenv('YCB_VIDEO_DIR')
- mesh = trimesh.load(f'{YCB_VIDEO_DIR}/models/{ob_name}/textured_simple.obj')
- return mesh
-
-
- class BopBaseReader:
- def __init__(self, base_dir, zfar=np.inf, resize=1):
- self.base_dir = base_dir
- self.resize = resize
- self.dataset_name = None
- self.color_files = sorted(glob.glob(f"{self.base_dir}/rgb/*"))
- if len(self.color_files)==0:
- self.color_files = sorted(glob.glob(f"{self.base_dir}/gray/*"))
- self.zfar = zfar
-
- self.K_table = {}
- with open(f'{self.base_dir}/scene_camera.json','r') as ff:
- info = json.load(ff)
- for k in info:
- self.K_table[f'{int(k):06d}'] = np.array(info[k]['cam_K']).reshape(3,3)
- self.bop_depth_scale = info[k]['depth_scale']
-
- if os.path.exists(f'{self.base_dir}/scene_gt.json'):
- with open(f'{self.base_dir}/scene_gt.json','r') as ff:
- self.scene_gt = json.load(ff)
- self.scene_gt = copy.deepcopy(self.scene_gt) # Release file handle to be pickle-able by joblib
- assert len(self.scene_gt)==len(self.color_files)
- else:
- self.scene_gt = None
-
- self.make_id_strs()
-
-
- def make_scene_ob_ids_dict(self):
- with open(f'{BOP_DIR}/{self.dataset_name}/test_targets_bop19.json','r') as ff:
- self.scene_ob_ids_dict = {}
- data = json.load(ff)
- for d in data:
- if d['scene_id']==self.get_video_id():
- id_str = f"{d['im_id']:06d}"
- if id_str not in self.scene_ob_ids_dict:
- self.scene_ob_ids_dict[id_str] = []
- self.scene_ob_ids_dict[id_str] += [d['obj_id']]*d['inst_count']
-
-
- def get_K(self, i_frame):
- K = self.K_table[self.id_strs[i_frame]]
- if self.resize!=1:
- K[:2,:2] *= self.resize
- return K
-
-
- def get_video_dir(self):
- video_id = int(self.base_dir.rstrip('/').split('/')[-1])
- return video_id
-
- def make_id_strs(self):
- self.id_strs = []
- for i in range(len(self.color_files)):
- name = os.path.basename(self.color_files[i]).split('.')[0]
- self.id_strs.append(name)
-
-
- def get_instance_ids_in_image(self, i_frame:int):
- ob_ids = []
- if self.scene_gt is not None:
- name = int(os.path.basename(self.color_files[i_frame]).split('.')[0])
- for k in self.scene_gt[str(name)]:
- ob_ids.append(k['obj_id'])
- elif self.scene_ob_ids_dict is not None:
- return np.array(self.scene_ob_ids_dict[self.id_strs[i_frame]])
- else:
- mask_dir = os.path.dirname(self.color_files[0]).replace('rgb','mask_visib')
- id_str = self.id_strs[i_frame]
- mask_files = sorted(glob.glob(f'{mask_dir}/{id_str}_*.png'))
- ob_ids = []
- for mask_file in mask_files:
- ob_id = int(os.path.basename(mask_file).split('.')[0].split('_')[1])
- ob_ids.append(ob_id)
- ob_ids = np.asarray(ob_ids)
- return ob_ids
-
-
- def get_gt_mesh_file(self, ob_id):
- raise RuntimeError("You should override this")
-
-
- def get_color(self,i):
- color = imageio.imread(self.color_files[i])
- if len(color.shape)==2:
- color = np.tile(color[...,None], (1,1,3)) # Gray to RGB
- if self.resize!=1:
- color = cv2.resize(color, fx=self.resize, fy=self.resize, dsize=None)
- return color
-
-
- def get_depth(self,i, filled=False):
- if filled:
- depth_file = self.color_files[i].replace('rgb','depth_filled')
- depth_file = f'{os.path.dirname(depth_file)}/0{os.path.basename(depth_file)}'
- depth = cv2.imread(depth_file,-1)/1e3
- else:
- depth_file = self.color_files[i].replace('rgb','depth').replace('gray','depth')
- depth = cv2.imread(depth_file,-1)*1e-3*self.bop_depth_scale
- if self.resize!=1:
- depth = cv2.resize(depth, fx=self.resize, fy=self.resize, dsize=None, interpolation=cv2.INTER_NEAREST)
- depth[depth<0.1] = 0
- depth[depth>self.zfar] = 0
- return depth
-
- def get_xyz_map(self,i):
- depth = self.get_depth(i)
- xyz_map = depth2xyzmap(depth, self.get_K(i))
- return xyz_map
-
-
- def get_mask(self, i_frame:int, ob_id:int, type='mask_visib'):
- '''
- @type: mask_visib (only visible part) / mask (projected mask from whole model)
- '''
- pos = 0
- name = int(os.path.basename(self.color_files[i_frame]).split('.')[0])
- if self.scene_gt is not None:
- for k in self.scene_gt[str(name)]:
- if k['obj_id']==ob_id:
- break
- pos += 1
- mask_file = f'{self.base_dir}/{type}/{name:06d}_{pos:06d}.png'
- if not os.path.exists(mask_file):
- logging.info(f'{mask_file} not found')
- return None
- else:
- # mask_dir = os.path.dirname(self.color_files[0]).replace('rgb',type)
- # mask_file = f'{mask_dir}/{self.id_strs[i_frame]}_{ob_id:06d}.png'
- raise RuntimeError
- mask = cv2.imread(mask_file, -1)
- if self.resize!=1:
- mask = cv2.resize(mask, fx=self.resize, fy=self.resize, dsize=None, interpolation=cv2.INTER_NEAREST)
- return mask>0
-
-
- def get_gt_mesh(self, ob_id:int):
- mesh_file = self.get_gt_mesh_file(ob_id)
- mesh = trimesh.load(mesh_file)
- mesh.vertices *= 1e-3
- return mesh
-
-
- def get_model_diameter(self, ob_id):
- dir = os.path.dirname(self.get_gt_mesh_file(self.ob_ids[0]))
- info_file = f'{dir}/models_info.json'
- with open(info_file,'r') as ff:
- info = json.load(ff)
- return info[str(ob_id)]['diameter']/1e3
-
-
-
- def get_gt_poses(self, i_frame, ob_id):
- gt_poses = []
- name = int(self.id_strs[i_frame])
- for i_k, k in enumerate(self.scene_gt[str(name)]):
- if k['obj_id']==ob_id:
- cur = np.eye(4)
- cur[:3,:3] = np.array(k['cam_R_m2c']).reshape(3,3)
- cur[:3,3] = np.array(k['cam_t_m2c'])/1e3
- gt_poses.append(cur)
- return np.asarray(gt_poses).reshape(-1,4,4)
-
-
- def get_gt_pose(self, i_frame:int, ob_id, mask=None, use_my_correction=False):
- ob_in_cam = np.eye(4)
- best_iou = -np.inf
- best_gt_mask = None
- name = int(self.id_strs[i_frame])
- for i_k, k in enumerate(self.scene_gt[str(name)]):
- if k['obj_id']==ob_id:
- cur = np.eye(4)
- cur[:3,:3] = np.array(k['cam_R_m2c']).reshape(3,3)
- cur[:3,3] = np.array(k['cam_t_m2c'])/1e3
- if mask is not None: # When multi-instance exists, use mask to determine which one
- gt_mask = cv2.imread(f'{self.base_dir}/mask_visib/{self.id_strs[i_frame]}_{i_k:06d}.png', -1).astype(bool)
- intersect = (gt_mask*mask).astype(bool)
- union = (gt_mask+mask).astype(bool)
- iou = float(intersect.sum())/union.sum()
- if iou>best_iou:
- best_iou = iou
- best_gt_mask = gt_mask
- ob_in_cam = cur
- else:
- ob_in_cam = cur
- break
-
-
- if use_my_correction:
- if 'ycb' in self.base_dir.lower() and 'train_real' in self.color_files[i_frame]:
- video_id = self.get_video_id()
- if ob_id==1:
- if video_id in [12,13,14,17,24]:
- ob_in_cam = [email protected]_tfs[ob_id][1]
- return ob_in_cam
-
-
- def load_symmetry_tfs(self):
- dir = os.path.dirname(self.get_gt_mesh_file(self.ob_ids[0]))
- info_file = f'{dir}/models_info.json'
- with open(info_file,'r') as ff:
- info = json.load(ff)
- self.symmetry_tfs = {}
- self.symmetry_info_table = {}
- for ob_id in self.ob_ids:
- self.symmetry_info_table[ob_id] = info[str(ob_id)]
- self.symmetry_tfs[ob_id] = symmetry_tfs_from_info(info[str(ob_id)], rot_angle_discrete=5)
- self.geometry_symmetry_info_table = copy.deepcopy(self.symmetry_info_table)
-
-
- def get_video_id(self):
- return int(self.base_dir.split('/')[-1])
-
-
- class LinemodOcclusionReader(BopBaseReader):
- def __init__(self,base_dir='/mnt/9a72c439-d0a7-45e8-8d20-d7a235d02763/DATASET/LINEMOD-O/lmo_test_all/test/000002', zfar=np.inf):
- super().__init__(base_dir, zfar=zfar)
- self.dataset_name = 'lmo'
- self.K = list(self.K_table.values())[0]
- self.ob_ids = [1,5,6,8,9,10,11,12]
- self.ob_id_to_names = {
- 1: 'ape',
- 2: 'benchvise',
- 3: 'bowl',
- 4: 'camera',
- 5: 'water_pour',
- 6: 'cat',
- 7: 'cup',
- 8: 'driller',
- 9: 'duck',
- 10: 'eggbox',
- 11: 'glue',
- 12: 'holepuncher',
- 13: 'iron',
- 14: 'lamp',
- 15: 'phone',
- }
- # self.load_symmetry_tfs()
-
- def get_gt_mesh_file(self, ob_id):
- mesh_dir = f'{BOP_DIR}/{self.dataset_name}/models/obj_{ob_id:06d}.ply'
- return mesh_dir
-
-
-
- class LinemodReader(LinemodOcclusionReader):
- def __init__(self, base_dir='/mnt/9a72c439-d0a7-45e8-8d20-d7a235d02763/DATASET/LINEMOD/lm_test_all/test/000001', zfar=np.inf, split=None):
- super().__init__(base_dir, zfar=zfar)
- self.dataset_name = 'lm'
- if split is not None: # train/test
- print("## split is not None")
- with open(f'/mnt/9a72c439-d0a7-45e8-8d20-d7a235d02763/DATASET/LINEMOD/Linemod_preprocessed/data/{self.get_video_id():02d}/{split}.txt','r') as ff:
- lines = ff.read().splitlines()
- self.color_files = []
- for line in lines:
- id = int(line)
- self.color_files.append(f'{self.base_dir}/rgb/{id:06d}.png')
- self.make_id_strs()
-
- self.ob_ids = np.setdiff1d(np.arange(1,16), np.array([7,3])).tolist() # Exclude bowl and mug
- # self.load_symmetry_tfs()
-
-
- def get_gt_mesh_file(self, ob_id):
- root = self.base_dir
- print(f'{root}/../')
- print(f'{root}/lm_models')
- print(f'{root}/lm_models/models/obj_{ob_id:06d}.ply')
- while 1:
- if os.path.exists(f'{root}/lm_models'):
- mesh_dir = f'{root}/lm_models/models/obj_{ob_id:06d}.ply'
- break
- else:
- root = os.path.abspath(f'{root}/../')
- mesh_dir = f'{root}/lm_models/models/obj_{ob_id:06d}.ply'
- break
- return mesh_dir
-
-
- def get_reconstructed_mesh(self, ref_view_dir):
- mesh = trimesh.load(os.path.abspath(f'{ref_view_dir}/model/model.obj'))
- return mesh
-
-
- class YcbVideoReader(BopBaseReader):
- def __init__(self, base_dir, zfar=np.inf):
- super().__init__(base_dir, zfar=zfar)
- self.dataset_name = 'ycbv'
- self.K = list(self.K_table.values())[0]
-
- self.make_id_strs()
-
- self.ob_ids = np.arange(1,22).astype(int).tolist()
- YCB_VIDEO_DIR = os.getenv('YCB_VIDEO_DIR')
- self.ob_id_to_names = {}
- self.name_to_ob_id = {}
- # names = sorted(os.listdir(f'{YCB_VIDEO_DIR}/models/'))
- if os.path.exists(f'{YCB_VIDEO_DIR}/models/'):
- names = sorted(os.listdir(f'{YCB_VIDEO_DIR}/models/'))
- for i,ob_id in enumerate(self.ob_ids):
- self.ob_id_to_names[ob_id] = names[i]
- self.name_to_ob_id[names[i]] = ob_id
- else:
- names = []
-
- if 0:
- # if 'BOP' not in self.base_dir:
- with open(f'{self.base_dir}/../../keyframe.txt','r') as ff:
- self.keyframe_lines = ff.read().splitlines()
-
- # self.load_symmetry_tfs()
- '''for ob_id in self.ob_ids:
- if ob_id in [1,4,6,18]: # Cylinder
- self.geometry_symmetry_info_table[ob_id] = {
- 'symmetries_continuous': [
- {'axis':[0,0,1], 'offset':[0,0,0]},
- ],
- 'symmetries_discrete': euler_matrix(0, np.pi, 0).reshape(1,4,4).tolist(),
- }
- elif ob_id in [13]:
- self.geometry_symmetry_info_table[ob_id] = {
- 'symmetries_continuous': [
- {'axis':[0,0,1], 'offset':[0,0,0]},
- ],
- }
- elif ob_id in [2,3,9,21]: # Rectangle box
- tfs = []
- for rz in [0, np.pi]:
- for rx in [0,np.pi]:
- for ry in [0,np.pi]:
- tfs.append(euler_matrix(rx, ry, rz))
- self.geometry_symmetry_info_table[ob_id] = {
- 'symmetries_discrete': np.asarray(tfs).reshape(-1,4,4).tolist(),
- }
- else:
- pass'''
-
- def get_gt_mesh_file(self, ob_id):
- if 'BOP' in self.base_dir:
- mesh_file = os.path.abspath(f'{self.base_dir}/../../ycbv_models/models/obj_{ob_id:06d}.ply')
- else:
- mesh_file = f'{self.base_dir}/../../ycbv_models/models/obj_{ob_id:06d}.ply'
- return mesh_file
-
-
- def get_gt_mesh(self, ob_id:int, get_posecnn_version=False):
- if get_posecnn_version:
- YCB_VIDEO_DIR = os.getenv('YCB_VIDEO_DIR')
- mesh = trimesh.load(f'{YCB_VIDEO_DIR}/models/{self.ob_id_to_names[ob_id]}/textured_simple.obj')
- return mesh
- mesh_file = self.get_gt_mesh_file(ob_id)
- mesh = trimesh.load(mesh_file, process=False)
- mesh.vertices *= 1e-3
- tex_file = mesh_file.replace('.ply','.png')
- if os.path.exists(tex_file):
- from PIL import Image
- im = Image.open(tex_file)
- uv = mesh.visual.uv
- material = trimesh.visual.texture.SimpleMaterial(image=im)
- color_visuals = trimesh.visual.TextureVisuals(uv=uv, image=im, material=material)
- mesh.visual = color_visuals
- return mesh
-
-
- def get_reconstructed_mesh(self, ob_id, ref_view_dir):
- mesh = trimesh.load(os.path.abspath(f'{ref_view_dir}/ob_{ob_id:07d}/model/model.obj'))
- return mesh
-
-
- def get_transform_reconstructed_to_gt_model(self, ob_id):
- out = np.eye(4)
- return out
-
-
- def get_visible_cloud(self, ob_id):
- file = os.path.abspath(f'{self.base_dir}/../../models/{self.ob_id_to_names[ob_id]}/visible_cloud.ply')
- pcd = o3d.io.read_point_cloud(file)
- return pcd
-
-
- def is_keyframe(self, i):
- color_file = self.color_files[i]
- video_id = self.get_video_id()
- frame_id = int(os.path.basename(color_file).split('.')[0])
- key = f'{video_id:04d}/{frame_id:06d}'
- return (key in self.keyframe_lines)
-
-
-
- class TlessReader(BopBaseReader):
- def __init__(self, base_dir, zfar=np.inf):
- super().__init__(base_dir, zfar=zfar)
- self.dataset_name = 'tless'
-
- self.ob_ids = np.arange(1,31).astype(int).tolist()
- self.load_symmetry_tfs()
-
-
- def get_gt_mesh_file(self, ob_id):
- mesh_file = f'{self.base_dir}/../../../models_cad/obj_{ob_id:06d}.ply'
- return mesh_file
-
-
- def get_gt_mesh(self, ob_id):
- mesh = trimesh.load(self.get_gt_mesh_file(ob_id))
- mesh.vertices *= 1e-3
- mesh = trimesh_add_pure_colored_texture(mesh, color=np.ones((3))*200)
- return mesh
-
-
- class HomebrewedReader(BopBaseReader):
- def __init__(self, base_dir, zfar=np.inf):
- super().__init__(base_dir, zfar=zfar)
- self.dataset_name = 'hb'
- self.ob_ids = np.arange(1,34).astype(int).tolist()
- self.load_symmetry_tfs()
- self.make_scene_ob_ids_dict()
-
-
- def get_gt_mesh_file(self, ob_id):
- mesh_file = f'{self.base_dir}/../../../hb_models/models/obj_{ob_id:06d}.ply'
- return mesh_file
-
-
- def get_gt_pose(self, i_frame:int, ob_id, use_my_correction=False):
- logging.info("WARN HomeBrewed doesn't have GT pose")
- return np.eye(4)
-
-
-
- class ItoddReader(BopBaseReader):
- def __init__(self, base_dir, zfar=np.inf):
- super().__init__(base_dir, zfar=zfar)
- self.dataset_name = 'itodd'
- self.make_id_strs()
-
- self.ob_ids = np.arange(1,29).astype(int).tolist()
- self.load_symmetry_tfs()
- self.make_scene_ob_ids_dict()
-
-
- def get_gt_mesh_file(self, ob_id):
- mesh_file = f'{self.base_dir}/../../../itodd_models/models/obj_{ob_id:06d}.ply'
- return mesh_file
-
-
- class IcbinReader(BopBaseReader):
- def __init__(self, base_dir, zfar=np.inf):
- super().__init__(base_dir, zfar=zfar)
- self.dataset_name = 'icbin'
- self.ob_ids = np.arange(1,3).astype(int).tolist()
- self.load_symmetry_tfs()
-
- def get_gt_mesh_file(self, ob_id):
- mesh_file = f'{self.base_dir}/../../../icbin_models/models/obj_{ob_id:06d}.ply'
- return mesh_file
-
-
- class TudlReader(BopBaseReader):
- def __init__(self, base_dir, zfar=np.inf):
- super().__init__(base_dir, zfar=zfar)
- self.dataset_name = 'tudl'
- self.ob_ids = np.arange(1,4).astype(int).tolist()
- self.load_symmetry_tfs()
-
- def get_gt_mesh_file(self, ob_id):
- mesh_file = f'{self.base_dir}/../../../tudl_models/models/obj_{ob_id:06d}.ply'
- return mesh_file
-
-
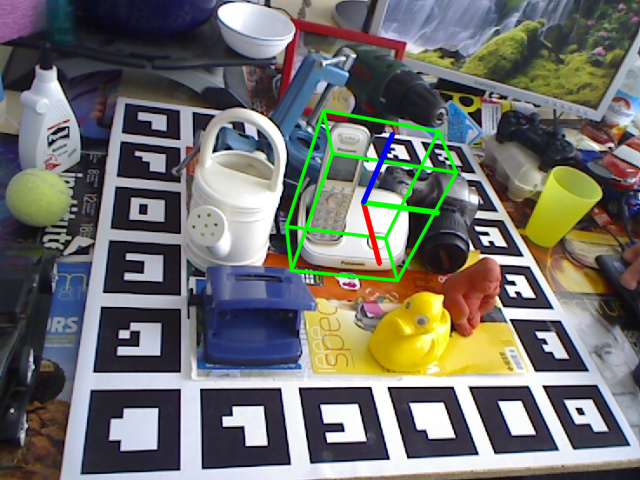
运行run_linemod.py:
python run_linemod.py能看到文件夹model_free_ref_views/lm_test_all/000015/track_vis/
里面存放可视化结果:
分享完成~
本文先介绍到这里,后面会分享“6D位姿估计”的其它数据集、算法、代码、具体应用示例。
评论记录:
回复评论: