
Canny算法
除了将目标与背景分离开来,边缘检测也同样是一种图像分割方法,从分割结果来看,adaptiveThreshold函数显然就采取了类似边缘检测的划分方案。
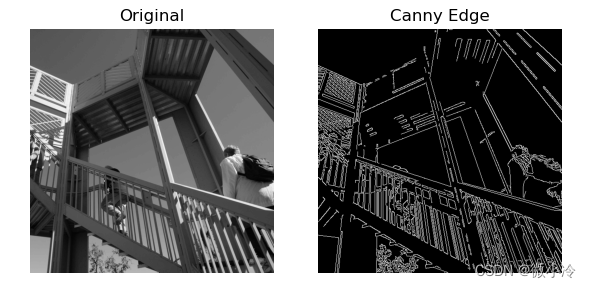
Canny在1986年提出了一种边缘检测算法,因其卓越的性能和准确性而广泛应用于各种图像分析领域。opencv中提供了这种算法,其操作步骤如下
- 高斯滤波:采用 5 × 5 5\times5 5×5的高斯滤波,对图像进行平滑,以降低灰度波动,使边缘更加明显。
- 梯度计算:用Sobel核函数对图像滤波,得到两个方向的一阶导数 G x , G y G_x, G_y Gx,Gy,从而得到图像的梯度 G x 2 + G y 2 \sqrt{G_x^2+G_y^2} Gx2+Gy2以及辐角 tan − 1 G y G x \tan^{-1}\frac{G_y}{G_x} tan−1GxGy
- 非极大值抑制:即抑制那些不是局部最大值的梯度值,即一个像素点,只有其梯度幅度大于周围像素点时,才被认为是边缘点。
- 双阈值处理:通过高阈值 t 2 t_2 t2和低阈值 t 1 t_1 t1来进一步判断边缘,某点若梯度幅度大于 t 2 t_2 t2,则被认为是边缘点;若处于 t 2 t_2 t2和 t 1 t_1 t1之间,则被认为是潜在的边缘点。
- 边缘跟踪和连接:最后,算法跟踪由边缘像素点组成的线,并连接它们以形成完整的边缘。
令 t 1 = 100 , t 2 = 200 t_1=100,t_2=200 t1=100,t2=200,则Canny算法的边缘检测结果如下
实现代码如下。
imgs = {}
imgs['Original'] = ascent().astype(np.uint8)
imgs['edges'] = cv2.Canny(img,100,200)
for i,key in enumerate(imgs, 1):
plt.subplot(1,2,i)
plt.imshow(imgs[key],cmap = 'gray')
plt.title(key)
plt.axis('off')
plt.show()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
【Canny】即为Canny边缘检测函数,其输入参数分别是待检测图像和阈值 t 1 , t 2 t_1, t_2 t1,t2。
霍夫变换-直线检测
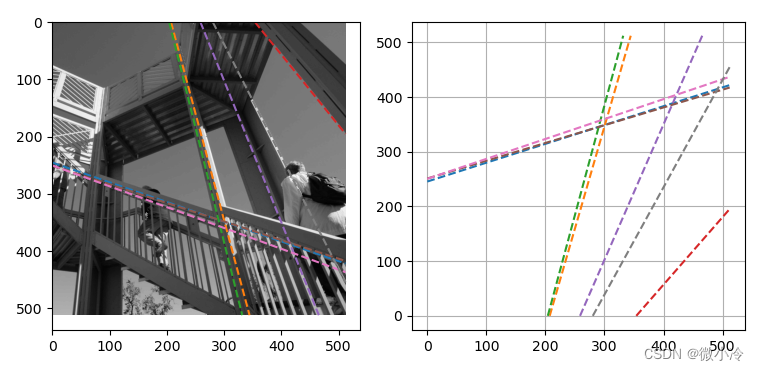
在获取图像边缘后,可能会对边缘的形状产生兴趣。1962年,Hough提出一种直线和圆的识别方案,思路是将图像中的点映射到一个参数空间,这个空间中涵盖了某个几何形状的所有参数,这个变换便被称作霍夫变换(Hough Transform, HT)。
Python中提供了基于HT的直线检测函数,可实现如下效果。
代码为
img = ascent().astype(np.uint8)
m, n = img.shape
edges = cv2.Canny(img, 50, 150, apertureSize = 3)
lines = cv2.HoughLines(edges,1.1,np.pi/180,200)
- 1
- 2
- 3
- 4
- 5
【HoughLines】就是HT直线检测函数,其输入的四个参数分别是待检测图像、以像素为单位的距离精度 p r p_r pr、以弧度为单位的角度精度 p θ p_\theta pθ以及累加平面的阈值参数。 p r , p θ p_r, p_\theta pr,pθ这两个值设得越大,则会检查出越多的直线。
其检测检测结果由 ( ρ , θ ) (\rho, \theta) (ρ,θ)来表示,其中 ρ \rho ρ表示直线与坐标原点 ( 0 , 0 ) (0,0) (0,0)的距离, θ \theta θ是直线的垂线与 x x x轴的夹角。从而直线方程可表示为点法式
x cos θ + y sin θ − ρ = 0 x\cos\theta+y\sin\theta-\rho=0 xcosθ+ysinθ−ρ=0
对于尺寸为 m m m行 n n n列的图像来说,四个边框分别是 x = 0 , x = n , y = 0 , y = m x=0, x=n, y=0, y=m x=0,x=n,y=0,y=m,记 c = cos θ , s = sin θ c=\cos\theta, s=\sin\theta c=cosθ,s=sinθ,则直线与四个边框的交点分别为
( 0 , ρ s ) ( n , ρ − n c s ) ( ρ c , 0 ) ( ρ − m s c , m ) (0,ρs)(n,ρ−ncs)(ρc,0)(ρ−msc,m) (0,sρ)(cρ,0)(n,sρ−nc)(cρ−ms,m)
从而绘图代码如下
fig, ax = plt.subplots(1,2)
ax[0].imshow(img, cmap='gray')
for line in lines:
rho,theta = line[0]
c = np.cos(theta)
s = np.sin(theta)
xs = [0, n, rho/c, (rho-m*s)/c]
ys = [rho/s, (rho-n*c)/s, 0, m]
i1, i2 = np.argsort(xs)[1:3]
ax[0].plot([xs[i1], xs[i2]], [ys[i1], ys[i2]], ls='--')
ax[1].plot([xs[i1], xs[i2]], [ys[i1], ys[i2]], ls='--')
plt.grid()
plt.show()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
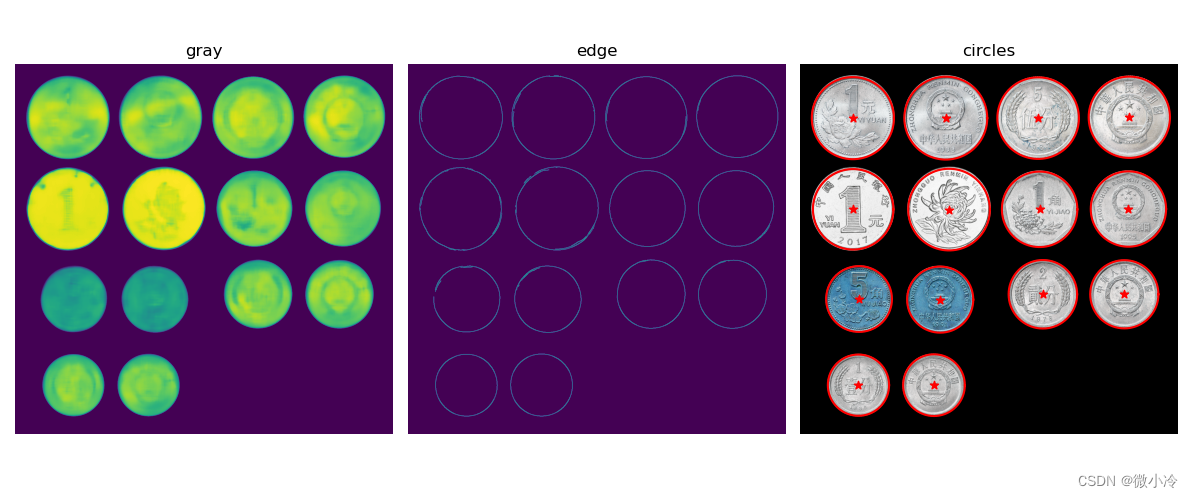
霍夫变换-圆形检测
opencv中提供了基于霍夫变换的圆形检测方法,可实现下图所示的检测结果。
其实现代码如下。
path = 'coins.png'
coins = {}
img = cv2.imread(path, cv2.IMREAD_COLOR)
gray = cv2.cv2tColor(img, cv2.COLOR_BGR2GRAY)
coins['gray'] = cv2.medianBlur(gray, 25)
coins['edge'] = cv2.Canny(coins['gray'],100,200)
rows = gray.shape[0]
circles = cv2.HoughCircles(coins['gray'], cv2.HOUGH_GRADIENT,
1, 150, param1=100, param2=30,
minRadius=1, maxRadius=300)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
【HoughCircles】是opencv提供的基于霍夫变换的圆形检测工具。
函数参数说明:
- image: 待检测灰度图像。
- method: 检测圆的方法。
- dp: 霍夫变换的分辨率,值越大,检测的圆越少,但越准确。
- minDist: 圆心之间的最小距离。
- param1: 边缘检测时使用Canny算子的高阈值,低阈值是高阈值的一半。
- param2: 用于圆心检测的参数。
- minRadius, maxRadius: 圆半径的最小值和最大值。
其中,opencv通提供了四种检测圆的方法,其method参数可选值如下
- 【cv2.HOUGH_GRADIENT】霍夫梯度法,通过计算图像中的梯度来确定圆心的可能位置,然后对这些位置进行投票,以确定真实的圆心。这种方法的问题是对噪声敏感。
- 【cv2.HOUGH_GRADIENT_ALT】霍夫梯度法的另一种实现。
- 【cv2.HOUGH_PROBABILISTIC】概率霍夫变换,与霍夫梯度法的区别是,并不通过全局投票来确定圆心,而检查一些候选点是否符合圆的方程,它通常会产生较少的假阳性结果,但可能检测不到某些圆。
- 【cv2.HOUGH_MULTI_SCALE】多尺度霍夫变换,将在不同尺度上应用霍夫变换,对缩放、旋转和倾斜变化具有更好的鲁棒性。和其他方法相比,该方法可能会检测到更多的圆,但也更吃计算资源。
绘图代码如下。
coins['circles'] = img
for i,key in enumerate(coins,1):
ax = plt.subplot(1,3,i)
plt.title(key)
plt.imshow(coins[key])
plt.axis('off')
th = np.deg2rad(np.arange(361))
for x,y,r in circles[0]:
xs = x + r*np.cos(th)
ys = y + r*np.sin(th)
plt.scatter(x, y, marker='*', color='red')
plt.plot(xs, ys, color='red')
plt.show()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
评论记录:
回复评论: