
Python 关键字
就像自然语言一样,计算机编程语言由一组称为关键字的预定义单词组成。每个关键字的规定用法规则称为语法。
Python 3.x 有 30+ 个关键字。每个关键字都有它特定的作用,所以不能将这些关键字作为变量名、类名等进行命名。Python 关键字列表可以使用 Python shell 中的以下帮助命令获得。
>>>help("keywords")
- 1
下表列出了 Python 中的所有关键字。
| False | break | for | not |
|---|---|---|---|
| None | class | from | or |
| True | continue | global | pass |
| peg_parser | def | if | raise |
| and | del | import | return |
| as | elif | in | try |
| assert | else | is | while |
| async | except | lambda | with |
| await | finally | nonlocal | yield |
使用help()命令了解每个单独关键字的更多信息。下面将显示def关键字的信息。
>>>help("def")
- 1
1.舵机原理
舵机内部有一个电位器,当转轴随电机旋转,电位器的电压会发生改变,电压会带动转一定的角度,舵机中的控制板就会电位器输出的电压所代表的角度,与输入的PWM所代表的角度进行比较,从而得出一个旋转的方向与角度。
该舵机可以控制0°~180°旋转
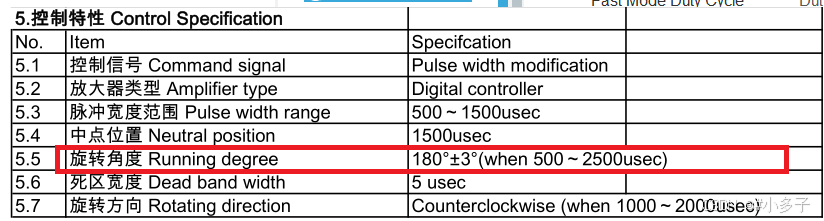
舵机0°~180°旋转对应高电平的时间为500us ~2500us,而一般舵机的频率为50Hz,也就是周期为20ms,对应的占空比就是2.5% ~12.5%,2.5%对应舵机转0°,12.5%对应舵机转180°,7.5%就对应着转90°。
2.简单使用
使用旋转编码器对舵机进行控制,旋转编码器转一圈是20个脉冲,也就是计数40次,为了让旋转编码器与舵机旋转对应上,也就是旋转编码器最大计数20就可以了,对应舵机的半圈
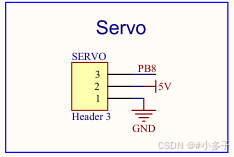
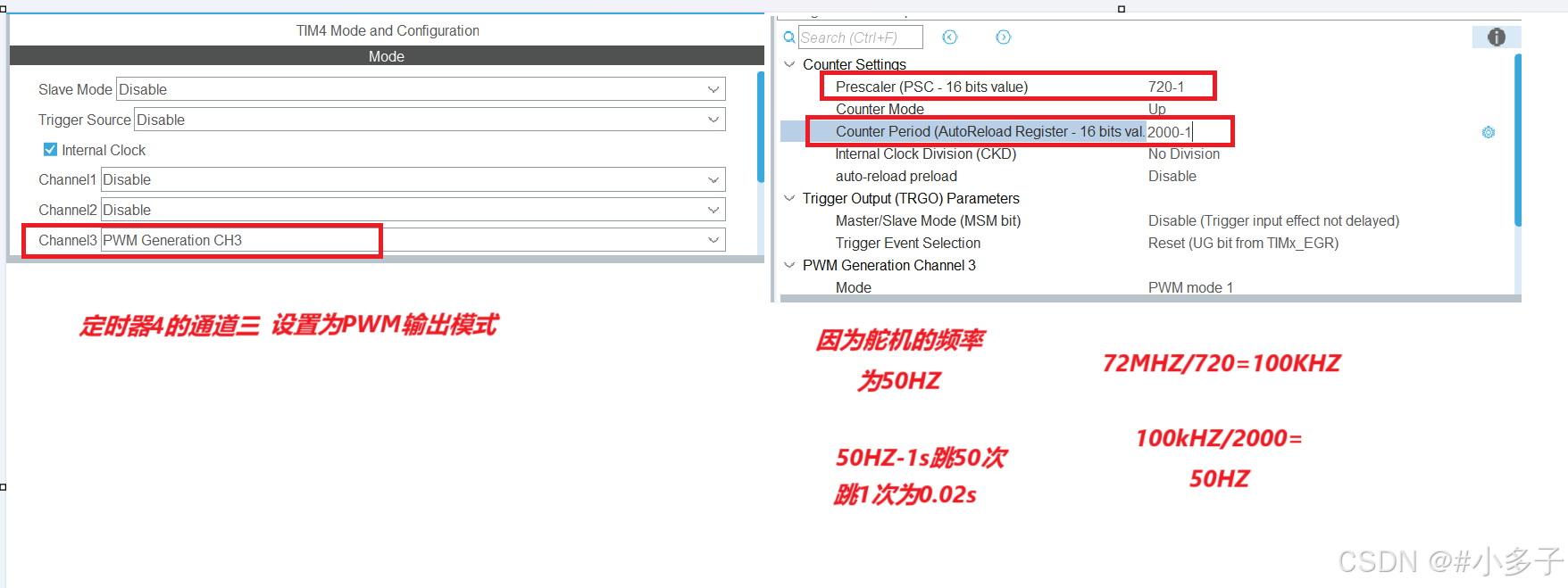
舵机的PWM输入引脚为PB8,我们需要将PB8设置为PWM输出引脚
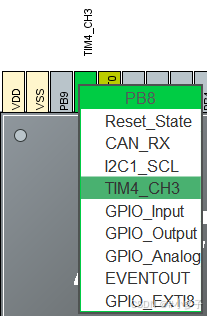
而PB8也是定时器4的通道3
代码:
#define MAX_COUNT 20
int main(void)
{
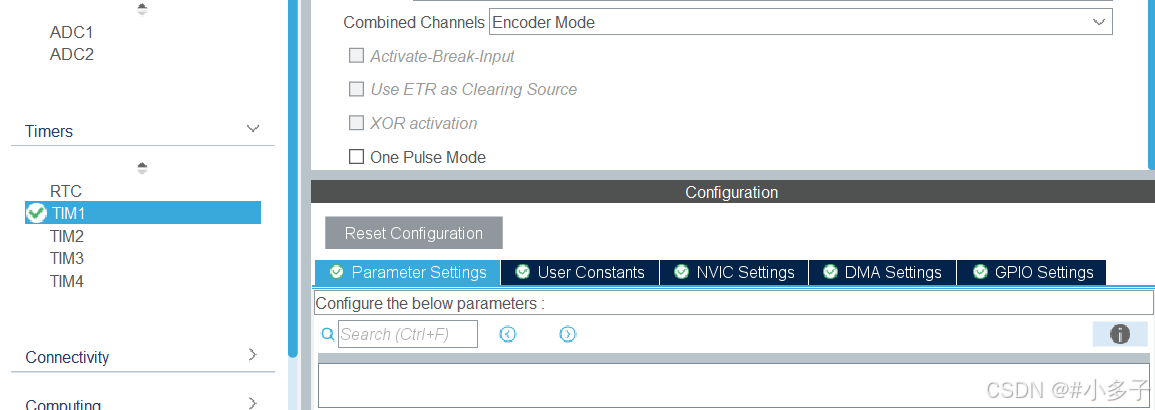
HAL_TIM_Encoder_Start(&htim1,TIM_CHANNEL_ALL);//编码器启动
HAL_TIM_PWM_Start(&htim4, TIM_CHANNEL_3);//PWM输出启动
int count=0;
int duty=0;//舵机高电平对应的计数次数
while (1)
{
count=__HAL_TIM_GET_COUNTER(&htim1);//统计编码器count=20就是转半圈
if(count>60000)//反转
{count=0;
__HAL_TIM_SET_COUNTER(&htim1,0);}
else if(count>MAX_COUNT)
{count=MAX_COUNT;
__HAL_TIM_SET_COUNTER(&htim1,MAX_COUNT);}//限制编码器最多输出10个脉冲,20次计数
duty=(10*(count/(float)MAX_COUNT)+2.5)/100.0*2000;
__HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_3,duty);
}
}
class="hljs-button signin active" data-title="登录复制" data-report-click="{"spm":"1001.2101.3001.4334"}">
评论记录:
回复评论: