class="hljs-ln-code"> class="hljs-ln-line">#include class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="3"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="4"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="5"> class="hljs-ln-code"> class="hljs-ln-line">#define DS18B20_PORT GPIOA class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="6"> class="hljs-ln-code"> class="hljs-ln-line">#define DS18B20_PIN GPIO_Pin_0 class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="7"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="8"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="9"> class="hljs-ln-code"> class="hljs-ln-line">#define SEG_PORT GPIOB class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="10"> class="hljs-ln-code"> class="hljs-ln-line">#define DIG_PORT GPIOC class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="11"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="12"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="13"> class="hljs-ln-code"> class="hljs-ln-line">const u8 SEG_CODE[] = {0x3F, 0x06, 0x5B, 0x4F, 0x66, 0x6D, 0x7D, 0x07, 0x7F, 0x6F}; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="14"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="15"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="16"> class="hljs-ln-code"> class="hljs-ln-line">void Delay(__IO uint32_t nCount) { class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="17"> class="hljs-ln-code"> class="hljs-ln-line"> for (; nCount != 0; nCount--); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="18"> class="hljs-ln-code"> class="hljs-ln-line">} class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="19"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="20"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="21"> class="hljs-ln-code"> class="hljs-ln-line">u8 DS18B20_Init(void) { class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="22"> class="hljs-ln-code"> class="hljs-ln-line"> u8 presence = 0; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="23"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_InitTypeDef GPIO_InitStructure; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="24"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="25"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="26"> class="hljs-ln-code"> class="hljs-ln-line"> RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="27"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_InitStructure.GPIO_Pin = DS18B20_PIN; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="28"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="29"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="30"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_Init(DS18B20_PORT, &GPIO_InitStructure); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="31"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="32"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="33"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_ResetBits(DS18B20_PORT, DS18B20_PIN); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="34"> class="hljs-ln-code"> class="hljs-ln-line"> Delay(500); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="35"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="36"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="37"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_SetBits(DS18B20_PORT, DS18B20_PIN); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="38"> class="hljs-ln-code"> class="hljs-ln-line"> Delay(60); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="39"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="40"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="41"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="42"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_Init(DS18B20_PORT, &GPIO_InitStructure); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="43"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="44"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="45"> class="hljs-ln-code"> class="hljs-ln-line"> if (!GPIO_ReadInputDataBit(DS18B20_PORT, DS18B20_PIN)) { class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="46"> class="hljs-ln-code"> class="hljs-ln-line"> presence = 1; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="47"> class="hljs-ln-code"> class="hljs-ln-line"> } class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="48"> class="hljs-ln-code"> class="hljs-ln-line"> Delay(480); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="49"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="50"> class="hljs-ln-code"> class="hljs-ln-line"> return presence; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="51"> class="hljs-ln-code"> class="hljs-ln-line">} class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="52"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="53"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="54"> class="hljs-ln-code"> class="hljs-ln-line">void DS18B20_WriteByte(u8 dat) { class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="55"> class="hljs-ln-code"> class="hljs-ln-line"> u8 i; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="56"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_InitTypeDef GPIO_InitStructure; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="57"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="58"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="59"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_InitStructure.GPIO_Pin = DS18B20_PIN; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="60"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="61"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="62"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_Init(DS18B20_PORT, &GPIO_InitStructure); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="63"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="64"> class="hljs-ln-code"> class="hljs-ln-line"> for (i = 0; i < 8; i++) { class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="65"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_ResetBits(DS18B20_PORT, DS18B20_PIN); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="66"> class="hljs-ln-code"> class="hljs-ln-line"> Delay(2); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="67"> class="hljs-ln-code"> class="hljs-ln-line"> if (dat & 0x01) { class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="68"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_SetBits(DS18B20_PORT, DS18B20_PIN); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="69"> class="hljs-ln-code"> class="hljs-ln-line"> } else { class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="70"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_ResetBits(DS18B20_PORT, DS18B20_PIN); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="71"> class="hljs-ln-code"> class="hljs-ln-line"> } class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="72"> class="hljs-ln-code"> class="hljs-ln-line"> Delay(60); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="73"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_SetBits(DS18B20_PORT, DS18B20_PIN); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="74"> class="hljs-ln-code"> class="hljs-ln-line"> dat >>= 1; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="75"> class="hljs-ln-code"> class="hljs-ln-line"> } class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="76"> class="hljs-ln-code"> class="hljs-ln-line">} class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="77"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="78"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="79"> class="hljs-ln-code"> class="hljs-ln-line">u8 DS18B20_ReadByte(void) { class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="80"> class="hljs-ln-code"> class="hljs-ln-line"> u8 i, dat = 0; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="81"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_InitTypeDef GPIO_InitStructure; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="82"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="83"> class="hljs-ln-code"> class="hljs-ln-line"> for (i = 0; i < 8; i++) { class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="84"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="85"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_InitStructure.GPIO_Pin = DS18B20_PIN; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="86"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="87"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="88"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_Init(DS18B20_PORT, &GPIO_InitStructure); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="89"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="90"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_ResetBits(DS18B20_PORT, DS18B20_PIN); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="91"> class="hljs-ln-code"> class="hljs-ln-line"> Delay(2); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="92"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_SetBits(DS18B20_PORT, DS18B20_PIN); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="93"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="94"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="95"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="96"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_Init(DS18B20_PORT, &GPIO_InitStructure); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="97"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="98"> class="hljs-ln-code"> class="hljs-ln-line"> if (GPIO_ReadInputDataBit(DS18B20_PORT, DS18B20_PIN)) { class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="99"> class="hljs-ln-code"> class="hljs-ln-line"> dat |= (0x01 << i); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="100"> class="hljs-ln-code"> class="hljs-ln-line"> } class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="101"> class="hljs-ln-code"> class="hljs-ln-line"> Delay(60); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="102"> class="hljs-ln-code"> class="hljs-ln-line"> } class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="103"> class="hljs-ln-code"> class="hljs-ln-line"> return dat; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="104"> class="hljs-ln-code"> class="hljs-ln-line">} class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="105"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="106"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="107"> class="hljs-ln-code"> class="hljs-ln-line">float DS18B20_ReadTemp(void) { class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="108"> class="hljs-ln-code"> class="hljs-ln-line"> u8 LSB, MSB; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="109"> class="hljs-ln-code"> class="hljs-ln-line"> short temp; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="110"> class="hljs-ln-code"> class="hljs-ln-line"> float temperature; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="111"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="112"> class="hljs-ln-code"> class="hljs-ln-line"> if (DS18B20_Init()) { class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="113"> class="hljs-ln-code"> class="hljs-ln-line"> DS18B20_WriteByte(0xCC); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="114"> class="hljs-ln-code"> class="hljs-ln-line"> DS18B20_WriteByte(0x44); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="115"> class="hljs-ln-code"> class="hljs-ln-line"> Delay(750000); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="116"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="117"> class="hljs-ln-code"> class="hljs-ln-line"> DS18B20_Init(); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="118"> class="hljs-ln-code"> class="hljs-ln-line"> DS18B20_WriteByte(0xCC); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="119"> class="hljs-ln-code"> class="hljs-ln-line"> DS18B20_WriteByte(0xBE); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="120"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="121"> class="hljs-ln-code"> class="hljs-ln-line"> LSB = DS18B20_ReadByte(); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="122"> class="hljs-ln-code"> class="hljs-ln-line"> MSB = DS18B20_ReadByte(); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="123"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="124"> class="hljs-ln-code"> class="hljs-ln-line"> temp = (MSB << 8) | LSB; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="125"> class="hljs-ln-code"> class="hljs-ln-line"> temperature = (float)temp / 16.0; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="126"> class="hljs-ln-code"> class="hljs-ln-line"> } else { class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="127"> class="hljs-ln-code"> class="hljs-ln-line"> temperature = -1; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="128"> class="hljs-ln-code"> class="hljs-ln-line"> } class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="129"> class="hljs-ln-code"> class="hljs-ln-line"> return temperature; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="130"> class="hljs-ln-code"> class="hljs-ln-line">} class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="131"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="132"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="133"> class="hljs-ln-code"> class="hljs-ln-line">void DisplayTemp(float temp) { class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="134"> class="hljs-ln-code"> class="hljs-ln-line"> u8 digit[4]; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="135"> class="hljs-ln-code"> class="hljs-ln-line"> u16 temp_int = (u16)(temp * 10); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="136"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="137"> class="hljs-ln-code"> class="hljs-ln-line"> digit[0] = temp_int / 1000; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="138"> class="hljs-ln-code"> class="hljs-ln-line"> digit[1] = (temp_int % 1000) / 100; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="139"> class="hljs-ln-code"> class="hljs-ln-line"> digit[2] = (temp_int % 100) / 10; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="140"> class="hljs-ln-code"> class="hljs-ln-line"> digit[3] = temp_int % 10; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="141"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="142"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="143"> class="hljs-ln-code"> class="hljs-ln-line"> for (int i = 0; i < 4; i++) { class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="144"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_ResetBits(DIG_PORT, GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="145"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_SetBits(DIG_PORT, GPIO_Pin_0 << i); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="146"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_Write(SEG_PORT, SEG_CODE[digit[i]]); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="147"> class="hljs-ln-code"> class="hljs-ln-line"> Delay(1000); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="148"> class="hljs-ln-code"> class="hljs-ln-line"> } class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="149"> class="hljs-ln-code"> class="hljs-ln-line">} class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="150"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="151"> class="hljs-ln-code"> class="hljs-ln-line">int main(void) { class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="152"> class="hljs-ln-code"> class="hljs-ln-line"> float temperature; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="153"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_InitTypeDef GPIO_InitStructure; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="154"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="155"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="156"> class="hljs-ln-code"> class="hljs-ln-line"> RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOC, ENABLE); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="157"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="158"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="159"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="160"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="161"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="162"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_Init(SEG_PORT, &GPIO_InitStructure); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="163"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="164"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="165"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3; class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="166"> class="hljs-ln-code"> class="hljs-ln-line"> GPIO_Init(DIG_PORT, &GPIO_InitStructure); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="167"> class="hljs-ln-code"> class="hljs-ln-line"> class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="168"> class="hljs-ln-code"> class="hljs-ln-line"> while (1) { class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="169"> class="hljs-ln-code"> class="hljs-ln-line"> temperature = DS18B20_ReadTemp(); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="170"> class="hljs-ln-code"> class="hljs-ln-line"> DisplayTemp(temperature); class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="171"> class="hljs-ln-code"> class="hljs-ln-line"> } class="hljs-ln-numbers"> class="hljs-ln-line hljs-ln-n" data-line-number="172"> class="hljs-ln-code"> class="hljs-ln-line">} class="hide-preCode-box"> class="hljs-button signin active" data-title="登录复制" data-report-click="{"spm":"1001.2101.3001.4334"}" onclick="hljs.signin(event)">
class="hljs-button signin active" data-title="登录复制" data-report-click="{"spm":"1001.2101.3001.4334"}" onclick="hljs.signin(event)">
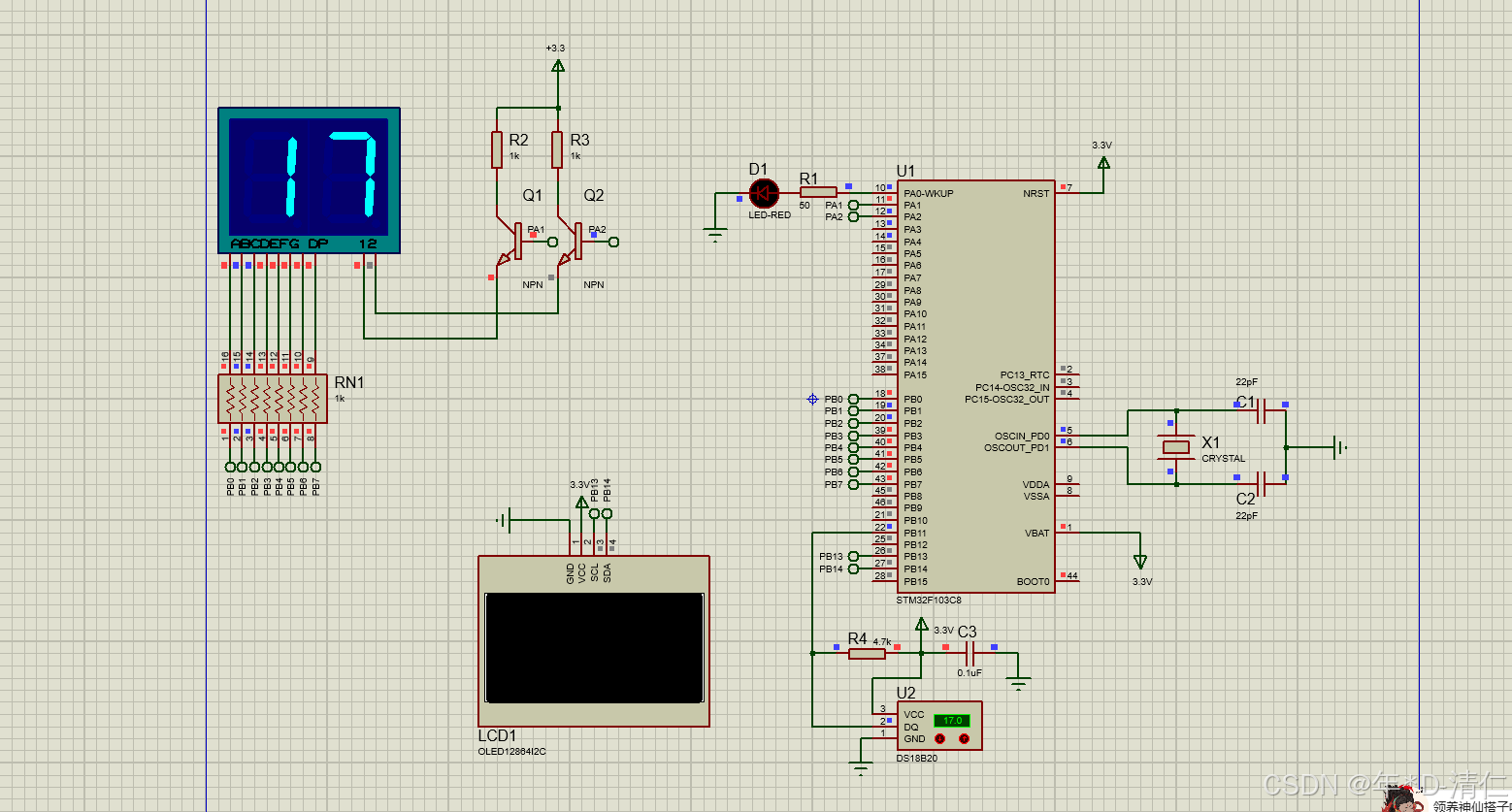
简单的示例代码,用于读取 DS18B20 的温度数据并显示在数码管上:
4. 代码编译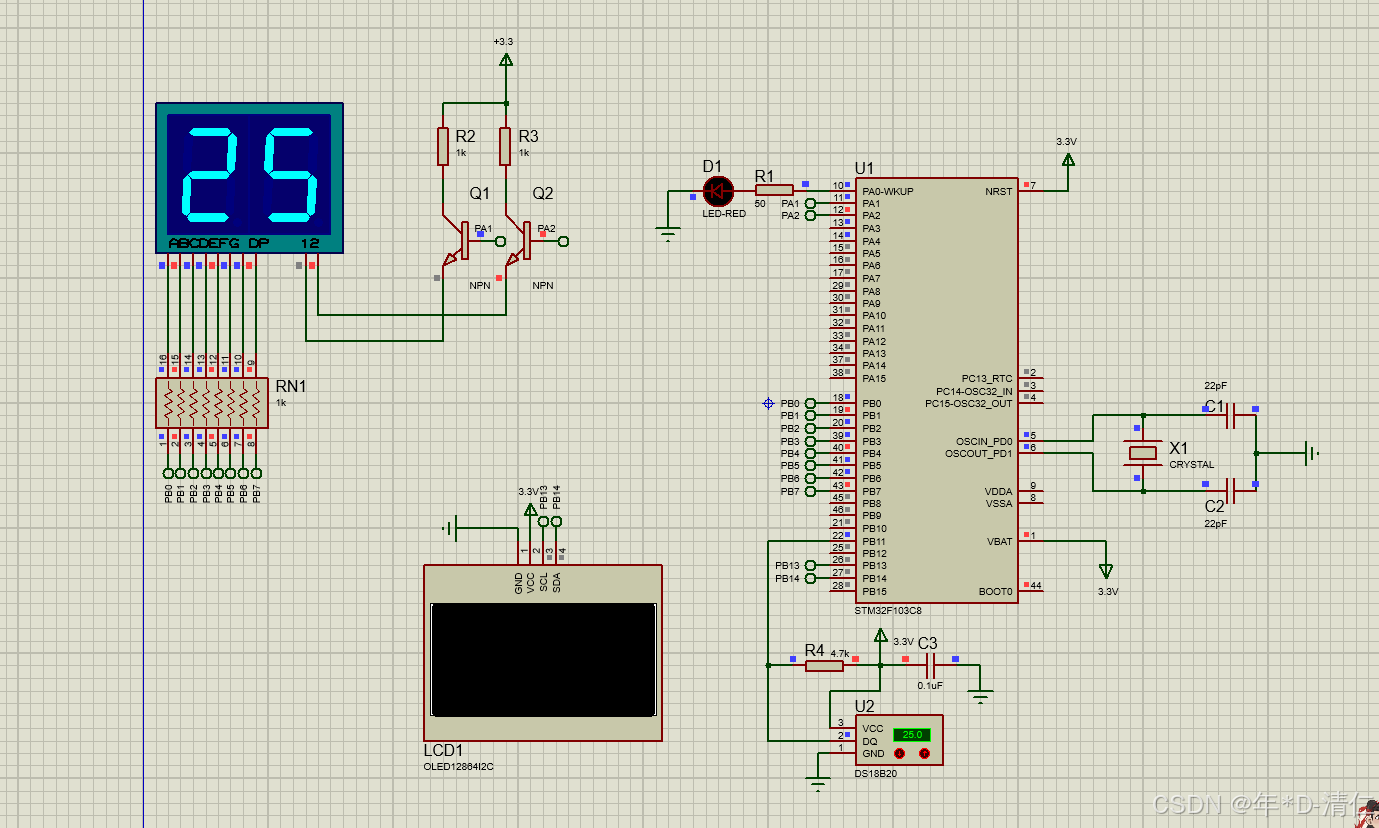
4. 代码编译和仿真
编译代码:在 Keil MDK 中,将上述代码保存为 .c 文件,进行编译,确保代码没有错误。
- 生成 hex 文件:在 Keil MDK 的项目选项中,配置生成
.hex 文件。 - 加载 hex 文件:在 Proteus 中,双击 STM32 芯片,在弹出的对话框中选择生成的
.hex 文件。 - 开始仿真:点击 Proteus 中的运行按钮,开始仿真。此时,数码管应该会显示 DS18B20 读取到的温度值。
5. 注意事项
- 延时函数:在实际应用中,需要根据具体的系统时钟频率调整延时函数的参数,以确保 DS18B20 的通信正常。
- 数码管驱动:数码管的驱动方式可以根据实际情况进行调整,例如使用动态扫描或静态显示。
- 错误处理:在代码中添加适当的错误处理机制,以提高系统的稳定性。
>>

 MDK 代码编写
MDK 代码编写
评论记录:
回复评论: