
1.4 深层神经网络
学习目标
- 目标
- 了解深层网络的前向传播与反向传播的过程
- 应用
- 图片识别等
为什么使用深层网络
对于人脸识别等应用,神经网络的第一层从原始图片中提取人脸的轮廓和边缘,每个神经元学习到不同边缘的信息;网络的第二层将第一层学得的边缘信息组合起来,形成人脸的一些局部的特征,例如眼睛、嘴巴等;后面的几层逐步将上一层的特征组合起来,形成人脸的模样。随着神经网络层数的增加,特征也从原来的边缘逐步扩展为人脸的整体,由整体到局部,由简单到复杂。层数越多,那么模型学习的效果也就越精确。
通过例子可以看到,随着神经网络的深度加深,模型能学习到更加复杂的问题,功能也更加强大。
1.4.1 深层神经网络表示
1.4.1.1 什么是深层网络?
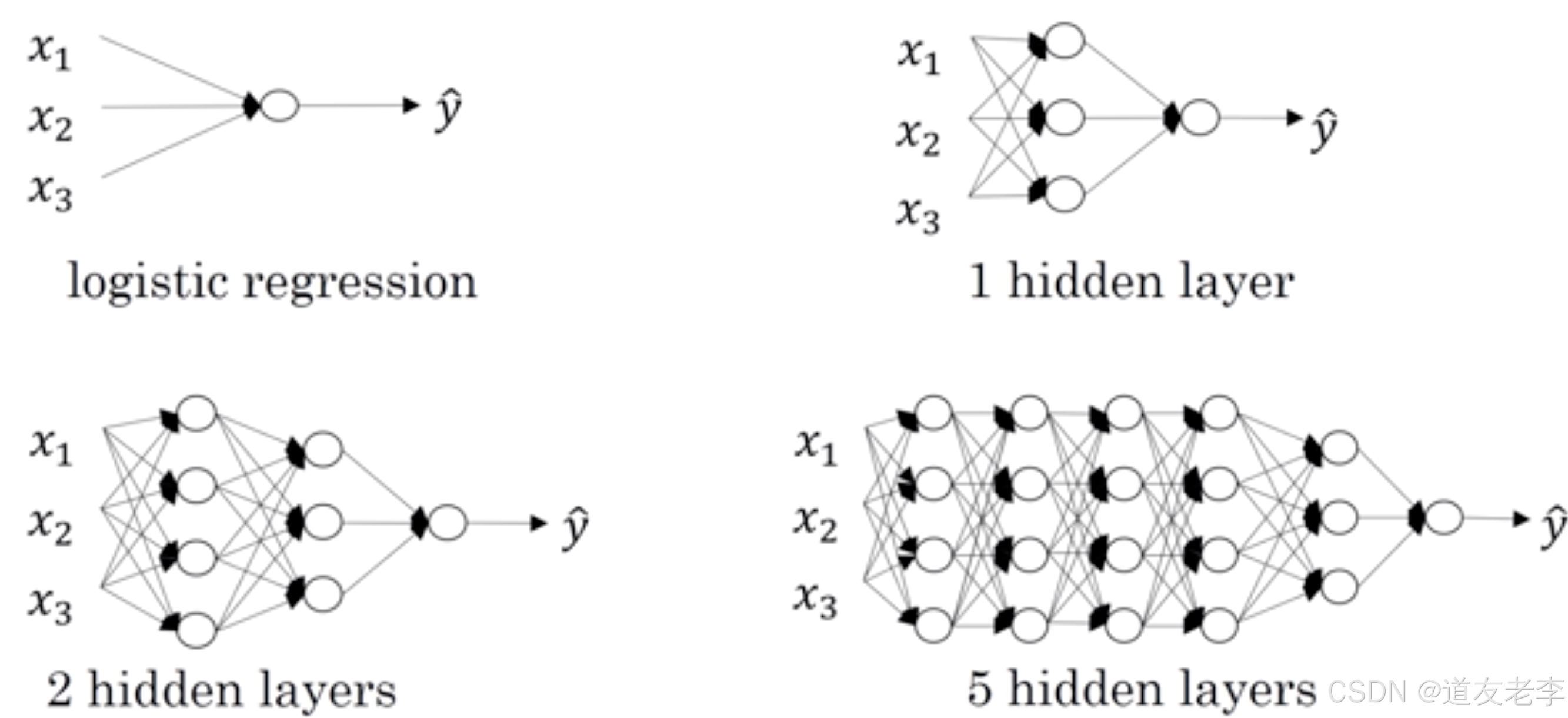
使用浅层网络的时候很多分类等问题得不到很好的解决,所以需要深层的网络。
1.4.2 四层网络的前向传播与反向传播
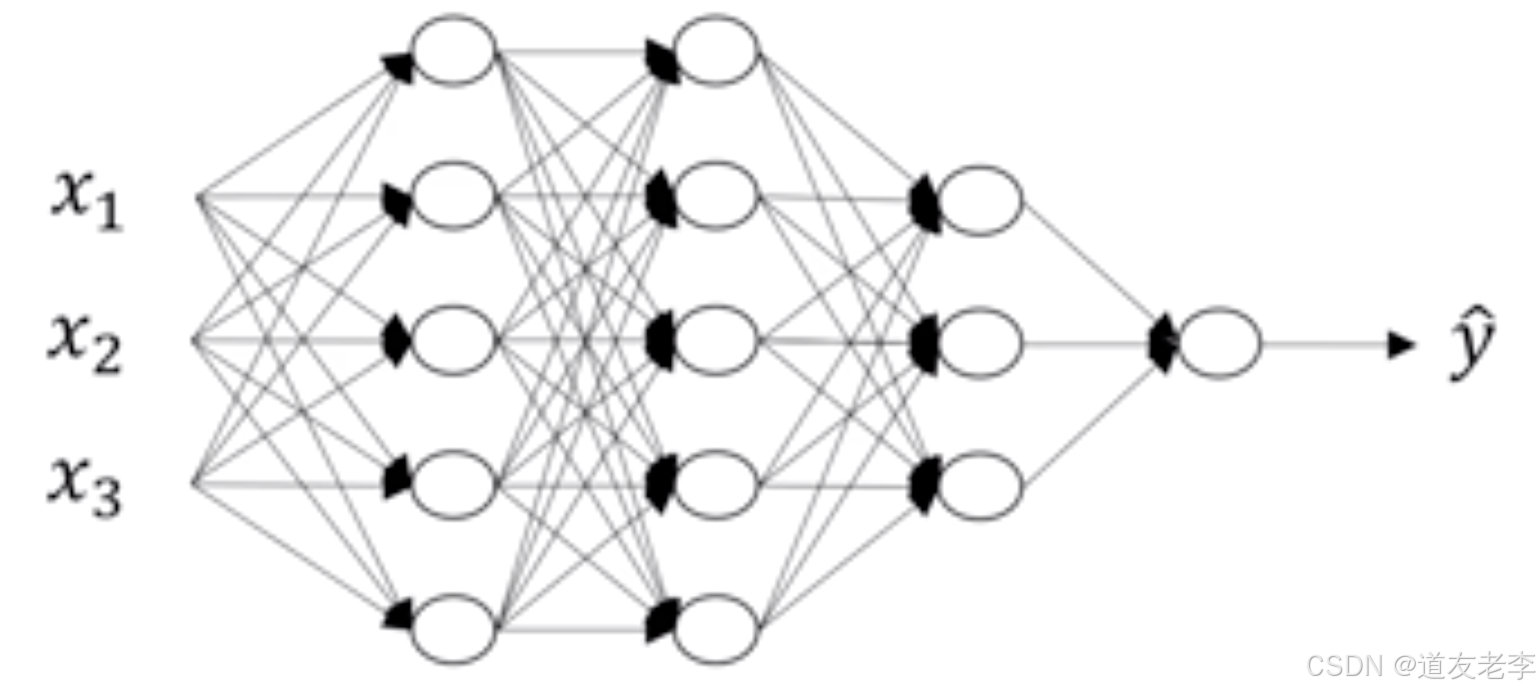
在这里首先对每层的符号进行一个确定,我们设置L为第几层,n为每一层的个数,L=[L1,L2,L3,L4],n=[5,5,3,1]
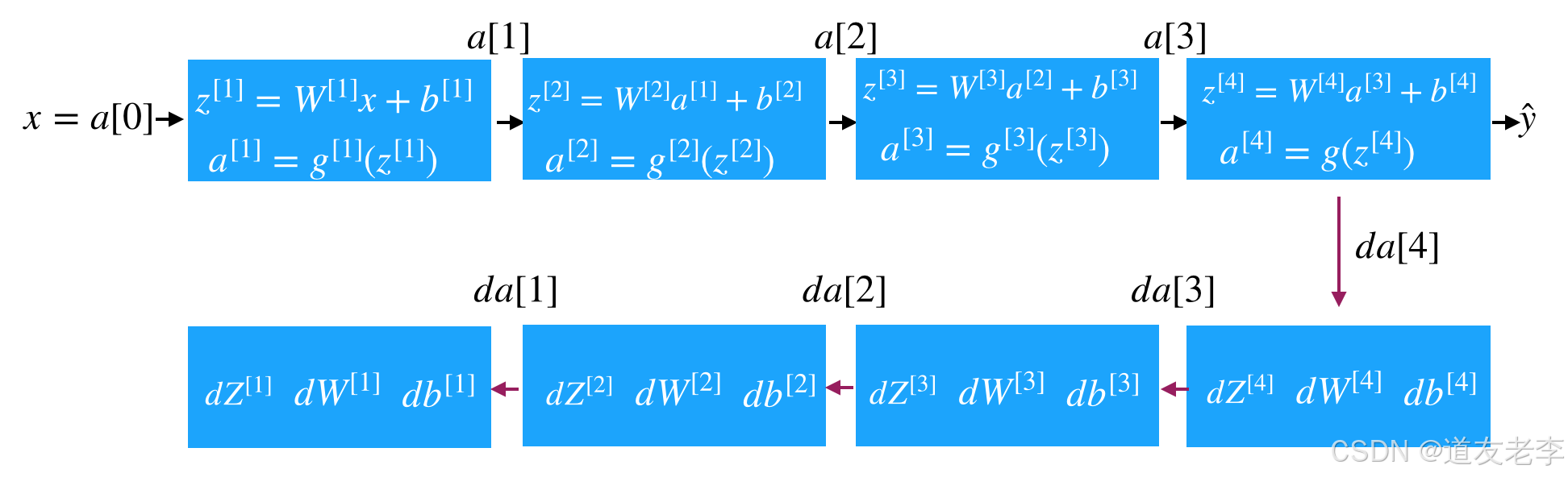
1.4.2.1 前向传播
首先还是以单个样本来进行表示,每层经过线性计算和激活函数两步计算
z [ 1 ] = W [ 1 ] x + b [ 1 ] , a [ 1 ] = g [ 1 ] ( z [ 1 ] ) z^{[1]} = W^{[1]}x+b^{[1]}, a^{[1]}=g^{[1]}(z^{[1]}) z[1]=W[1]x+b[1],a[1]=g[1](z[1]), 输入 x x x , 输出 , 输出 ,输出 a [ 1 ] a^{[1]} a[1]
z [ 2 ] = W [ 2 ] a [ 1 ] + b [ 2 ] , a [ 2 ] = g [ 2 ] ( z [ 2 ] ) z^{[2]} = W^{[2]}a^{[1]}+b^{[2]}, a^{[2]}=g^{[2]}(z^{[2]}) z[2]=W[2]a[1]+b[2],a[2]=g[2](z[2]),输入 a [ 1 ] a^{[1]} a[1], 输出 a [ 2 ] a^{[2]} a[2]
z [ 3 ] = W [ 3 ] a [ 2 ] + b [ 3 ] , a [ 3 ] = g [ 3 ] ( z [ 3 ] ) z^{[3]} = W^{[3]}a^{[2]}+b^{[3]},a^{[3]}=g^{[3]}(z^{[3]}) z[3]=W[3]a[2]+b[3],a[3]=g[3](z[3]), 输入 a [ 2 ] a^{[2]} a[2], 输出 a [ 3 ] a^{[3]} a[3]
z [ 4 ] = W [ 4 ] a [ 3 ] + b [ 4 ] , a [ 4 ] = σ ( z [ 4 ] ) z^{[4]} = W^{[4]}a^{[3]}+b^{[4]},a^{[4]}=\sigma(z^{[4]}) z[4]=W[4]a[3]+b[4],a[4]=σ(z[4]), 输入 a [ 3 ] a^{[3]} a[3], 输出 a [ 4 ] a^{[4]} a[4]
我们将上式简单的用通用公式表达出来, x = a [ 0 ] x = a^{[0]} x=a[0]
z [ L ] = W [ L ] a [ L − 1 ] + b [ L ] , a [ L ] = g [ L ] ( z [ L ] ) z^{[L]} = W^{[L]}a^{[L-1]}+b^{[L]}, a^{[L]}=g^{[L]}(z^{[L]}) z[L]=W[L]a[L−1]+b[L],a[L]=g[L](z[L]), 输入 a [ L − 1 ] a^{[L-1]} a[L−1], 输出 a [ L ] a^{[L]} a[L]
- m个样本的向量表示
Z [ L ] = W [ L ] A [ L − 1 ] + b [ L ] Z^{[L]} = W^{[L]}A^{[L-1]}+b^{[L]} Z[L]=W[L]A[L−1]+b[L]
A [ L ] = g [ L ] ( Z [ L ] ) A^{[L]}=g^{[L]}(Z^{[L]}) A[L]=g[L](Z[L])
输入 a [ L − 1 ] a^{[L-1]} a[L−1], 输出 a [ L ] a^{[L]} a[L]
1.4.2.2 反向传播
因为涉及到的层数较多,所以我们通过一个图来表示反向的过程
- 反向传播的结果(理解)
单个样本的反向传播:
d Z [ l ] = d J d a [ l ] d a [ l ] d Z [ l ] = d a [ l ] dZ^{[l]}=\frac{dJ}{da^{[l]}}\frac{da^{[l]}}{dZ^{[l]}}=da^{[l]} dZ[l]=da[l]dJdZ[l]da[l]=da[l]
d W [ l ] = d J d Z [ l ] d Z [ l ] d W [ l ] = d Z [ l ] ⋅ a [ l − 1 ] dW^{[l]}=\frac{dJ}{dZ^{[l]}}\frac{dZ^{[l]}}{dW^{[l]}}=dZ^{[l]}\cdot a^{[l-1]} dW[l]=dZ[l]dJdW[l]dZ[l]=dZ[l]⋅a[l−1]
d b [ l ] = d J d Z [ l ] d Z [ l ] d b [ l ] = d Z [ l ] db^{[l]}=\frac{dJ}{dZ^{[l]}}\frac{dZ^{[l]}}{db^{[l]}}=dZ^{[l]} db[l]=dZ[l]dJdb[l]dZ[l]=dZ[l]
d a [ l − 1 ] = W [ l ] T ⋅ d Z [ l ] da^{[l-1]}=W^{[l]T}\cdot dZ^{[l]} da[l−1]=W[l]T⋅dZ[l]
多个样本的反向传播
d Z [ l ] = d A [ l ] ∗ g [ l ] ′ ( Z [ l ] ) dZ^{[l]}=dA^{[l]}*g^{[l]}{'}(Z^{[l]}) dZ[l]=dA[l]∗g[l]′(Z[l])
d W [ l ] = 1 m d Z [ l ] ⋅ A [ l − 1 ] T dW^{[l]}=\frac{1}{m}dZ^{[l]}\cdot {A^{[l-1]}}^{T} dW[l]=m1dZ[l]⋅A[l−1]T
d b [ l ] = 1 m n p . s u m ( d Z [ l ] , a x i s = 1 ) db^{[l]}=\frac{1}{m}np.sum(dZ^{[l]},axis=1) db[l]=m1np.sum(dZ[l],axis=1)
d A [ l ] = W [ l + 1 ] T ⋅ d Z [ l + 1 ] dA^{[l]}=W^{[l+1]T}\cdot dZ^{[l+1]} dA[l]=W[l+1]T⋅dZ[l+1]
1.4.3 参数与超参数
1.4.3.1 参数
参数即是我们在过程中想要模型学习到的信息(模型自己能计算出来的),例如 W[l]W[l],b[l]b[l]。而**超参数(hyper parameters)**即为控制参数的输出值的一些网络信息(需要人经验判断)。超参数的改变会导致最终得到的参数 W[l],b[l] 的改变。
1.4.3.2 超参数
典型的超参数有:
- 学习速率:α
- 迭代次数:N
- 隐藏层的层数:L
- 每一层的神经元个数:n[1],n[2],…
- 激活函数 g(z) 的选择
当开发新应用时,预先很难准确知道超参数的最优值应该是什么。因此,通常需要尝试很多不同的值。应用深度学习领域是一个很大程度基于经验的过程。
1.4.3.3 参数初始化
- 为什么要随机初始化权重
如果在初始时将两个隐藏神经元的参数设置为相同的大小,那么两个隐藏神经元对输出单元的影响也是相同的,通过反向梯度下降去进行计算的时候,会得到同样的梯度大小,所以在经过多次迭代后,两个隐藏层单位仍然是对称的。无论设置多少个隐藏单元,其最终的影响都是相同的,那么多个隐藏神经元就没有了意义。
在初始化的时候,W 参数要进行随机初始化,不可以设置为 0。b 因为不存在上述问题,可以设置为 0。
以 2 个输入,2 个隐藏神经元为例:
W = np.random.randn(2,2)* 0.01
b = np.zeros((2,1))
- 1
- 2
- 初始化权重的值选择
这里将 W 的值乘以 0.01(或者其他的常数值)的原因是为了使得权重 W 初始化为较小的值,这是因为使用 sigmoid 函数或者 tanh 函数作为激活函数时,W 比较小,则 Z=WX+b 所得的值趋近于 0,梯度较大,能够提高算法的更新速度。而如果 W 设置的太大的话,得到的梯度较小,训练过程因此会变得很慢。
ReLU 和 Leaky ReLU 作为激活函数时不存在这种问题,因为在大于 0 的时候,梯度均为 1。
评论记录:
回复评论: